Clear Sky Science · es
Soluciones cuadrado-integrables y estabilidad de una ecuación estocástica integro-diferencial de segundo orden
Por qué el pasado y la aleatoriedad importan para los sistemas ingenieriles
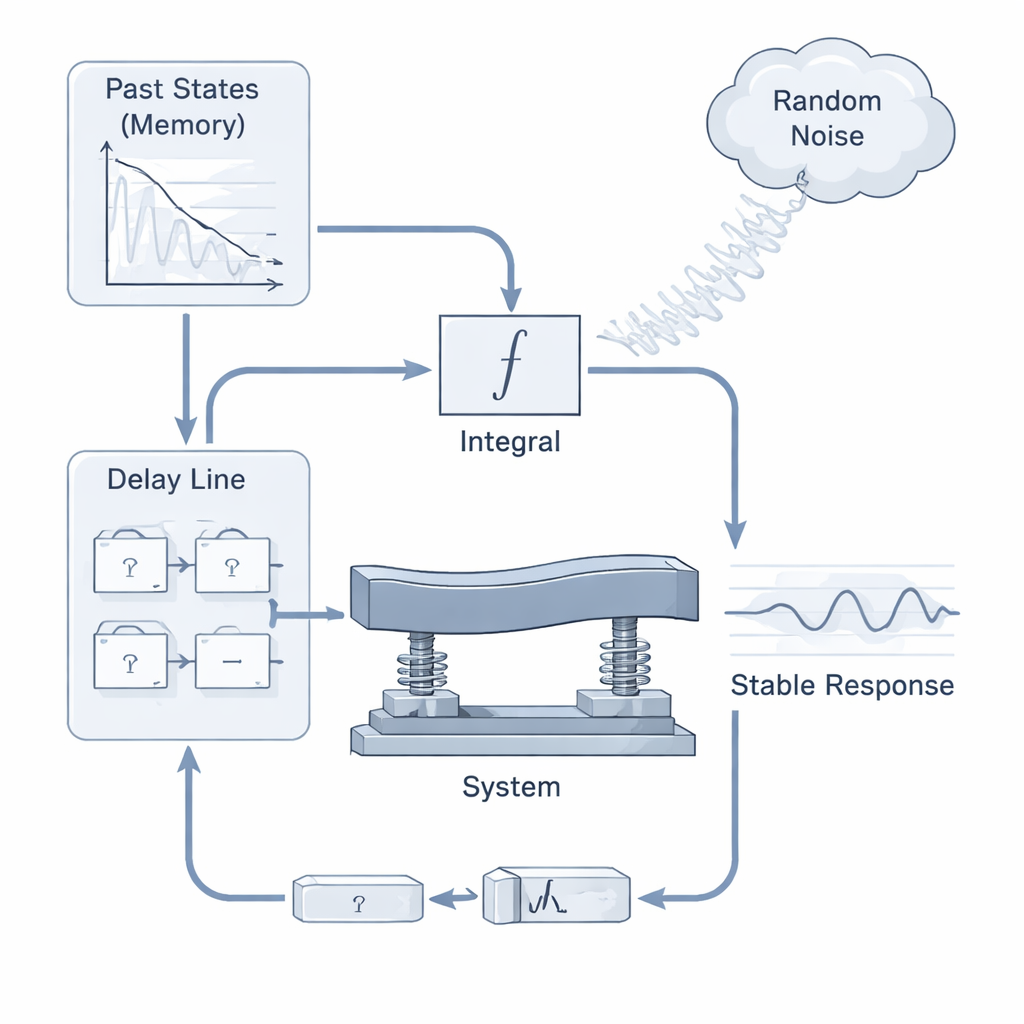
Muchos dispositivos modernos —desde brazos robóticos flexibles hasta puentes con amortiguación de vibraciones— no responden sólo a lo que ocurre en el instante presente. Su movimiento está influenciado por movimientos pasados, señales de sensores con retardo y las vibraciones aleatorias siempre presentes en el entorno. Este artículo plantea una pregunta fundamental sobre tales sistemas: incluso cuando están sometidos a ruido y conservan memoria del pasado, ¿podemos garantizar que sus movimientos se mantendrán controlados en lugar de crecer sin límite?
Una nueva forma de seguir sistemas ruidosos con memoria
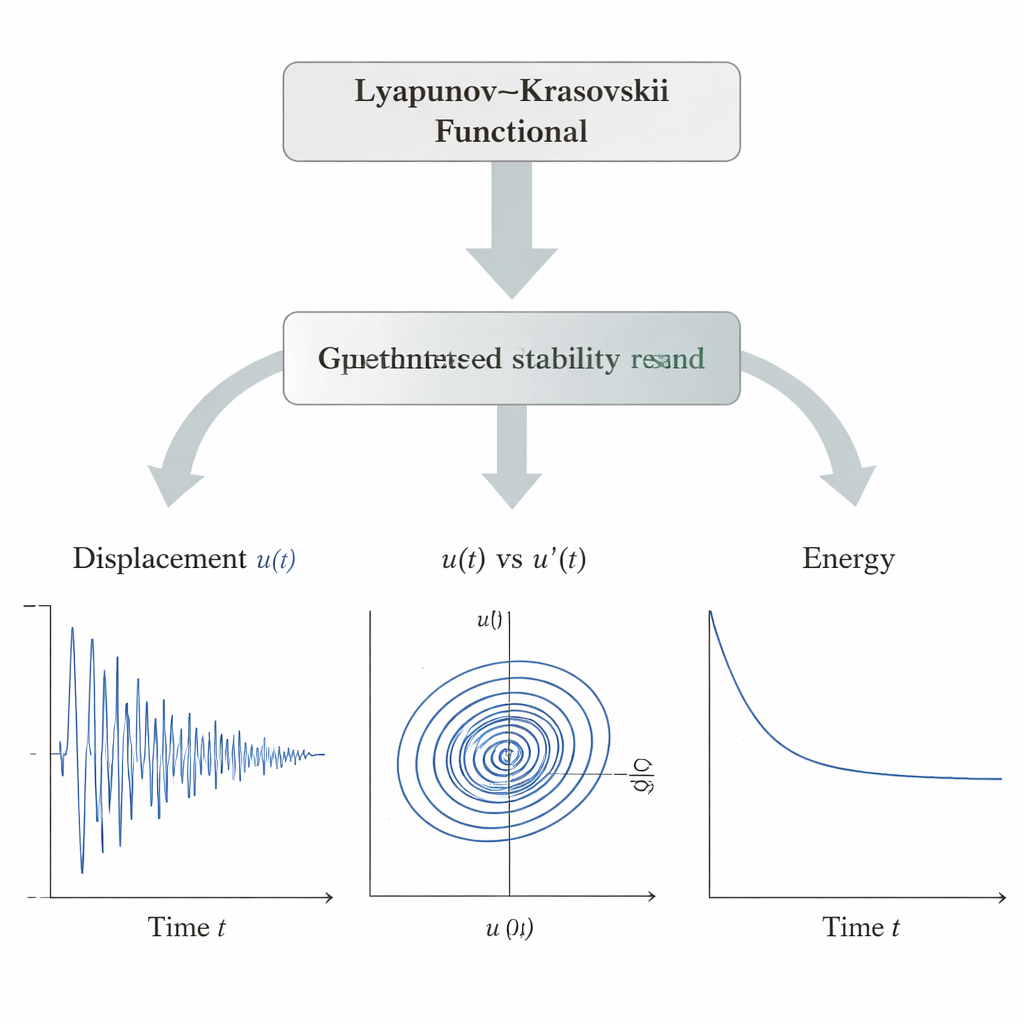
Los autores estudian una amplia familia de modelos matemáticos denominados ecuaciones estocásticas integro-diferenciales de segundo orden con retardos. En términos sencillos, estas ecuaciones describen cómo varía una cantidad como el desplazamiento cuando depende de su posición y velocidad actuales, de su historial temporal, de retroalimentación con retardo y de fluctuaciones aleatorias. Este tipo de descripción resulta natural para materiales viscoelásticos, amortiguadores de vibración y sistemas mecánicos o mecatrónicos con control por realimentación. Una dificultad clave es que las herramientas tradicionales suelen abordar sólo una complicación a la vez —ruido, o retardos, o memoria— pero no las tres a la vez. Aquí, los autores diseñan una herramienta analítica más potente, un funcional de Lyapunov–Krasovskii, construido con cuidado para captar el efecto combinado del ruido, los retardos variables y los términos de memoria.
Mantener el movimiento acotado pese a retardos y ruido
Usando este nuevo funcional, el artículo deriva condiciones bajo las cuales los sistemas modelados se comportan bien a largo plazo. En concreto, los autores muestran que, si se imponen ciertos límites naturales sobre la intensidad de la realimentación, el amortiguamiento y los efectos de memoria, entonces toda solución permanece acotada en el tiempo. Además, el estado del sistema tiende a estabilizarse hacia una posición de reposo en un sentido estocástico: las perturbaciones aleatorias pueden provocar oscilaciones a corto plazo, pero éstas no se acumulan hasta producir un crecimiento descontrolado. A esta propiedad se la denomina estabilidad asintótica estocástica. Las condiciones se expresan mediante desigualdades sencillas sobre los coeficientes que describen el amortiguamiento, la rigidez, la magnitud del retardo y la intensidad del ruido aleatorio. En principio, los ingenieros pueden emplear estas desigualdades como pautas de diseño para garantizar una operación segura.
Movimiento cuadrado-integrable y control de la energía
Más allá de mostrar que los movimientos permanecen acotados, los autores prueban una propiedad más fuerte relacionada con lo que denominan cuadrado-integrabilidad. Traducido a un lenguaje más familiar, esto significa que si se observa la energía total acumulada del sistema —construida a partir del cuadrado del desplazamiento y del cuadrado de su velocidad— dicha energía total permanece finita a lo largo de todo el futuro del movimiento. La energía acumulada finita implica que, en promedio, las oscilaciones deben decaer en vez de persistir indefinidamente. Matemáticamente, esto se establece mostrando que el funcional de Lyapunov–Krasovskii decrece a lo largo de las trayectorias del sistema con la suficiente rapidez como para que la integral del movimiento al cuadrado converja. Este resultado conecta el funcional abstracto directamente con una cantidad físicamente significativa, análoga a la energía.
Poner la teoría a prueba con simulaciones
Para ilustrar los resultados abstractos, los autores simulan dos sistemas modelo detallados que encajan en su marco general. Empleando una combinación del método de Euler–Maruyama para la parte aleatoria y cuadraturas numéricas para los integrales de memoria, generan trayectorias de ejemplo a lo largo del tiempo. Los desplazamientos simulados muestran una fase transitoria inicial con oscilaciones aleatorias apreciables, y luego se estabilizan en pequeñas fluctuaciones acotadas alrededor del estado de reposo. Los diagramas de fase exhiben curvas en forma de espiral que permanecen confinadas en una región limitada, y las curvas de energía calculadas decrecen y se mantienen acotadas. Estos experimentos numéricos confirman que las condiciones teóricas de estabilidad y cuadrado-integrabilidad efectivamente predicen un movimiento realista y bien comportado, incluso cuando están presentes retardos y fuerzas aleatorias.
Qué significa esto para sistemas del mundo real
Para un lector no especializado, la conclusión principal es que el artículo ofrece una forma rigurosa de certificar que sistemas complejos, con retardos y ruido, no se descontrolarán. Al construir una nueva medida análoga a la energía que tiene en cuenta tanto la memoria como la aleatoriedad, los autores muestran cuándo las oscilaciones permanecen acotadas y su energía global permanece finita. Esto avanza las bases matemáticas que sustentan el diseño de dispositivos de control de vibraciones, estructuras mecánicas flexibles y otras tecnologías en las que la retroalimentación retardada y las perturbaciones aleatorias son inevitables. Las mismas ideas podrían orientar trabajos futuros en ámbitos tan diversos como la regulación biológica, la dinámica económica y el control en red, donde el pasado y el azar configuran conjuntamente la evolución del sistema.
Cita: Oudjedi-Damerdji, L.F., Meziane, M., Djidel, O. et al. Square integrable solutions and stability of a second-order stochastic integro-differential equation. Sci Rep 16, 7158 (2026). https://doi.org/10.1038/s41598-026-37970-5
Palabras clave: estabilidad estocástica, ecuaciones diferenciales con retardo, métodos de Lyapunov, sistemas integro-diferenciales, control de vibraciones