Clear Sky Science · es
Análisis reconfigurable y optimización del espacio de trabajo de un robot paralelo modular suspendido por cables
Robots que se desplazan por raíles invisibles
Imagínese un robot que pueda deslizar una cámara pesada por un estadio, elevar materiales de construcción en una obra o guiar un dispositivo de rehabilitación alrededor de un paciente, todo mientras cuelga de cables en lugar de desplazarse sobre brazos rígidos. Este artículo presenta un nuevo tipo de robot suspendido por cables cuya estructura puede cambiarse bajo demanda, permitiendo que una sola máquina se adapte a múltiples tareas mientras aprovecha al máximo los movimientos útiles de su espacio de trabajo.
Construir un robot a partir de piezas intercambiables
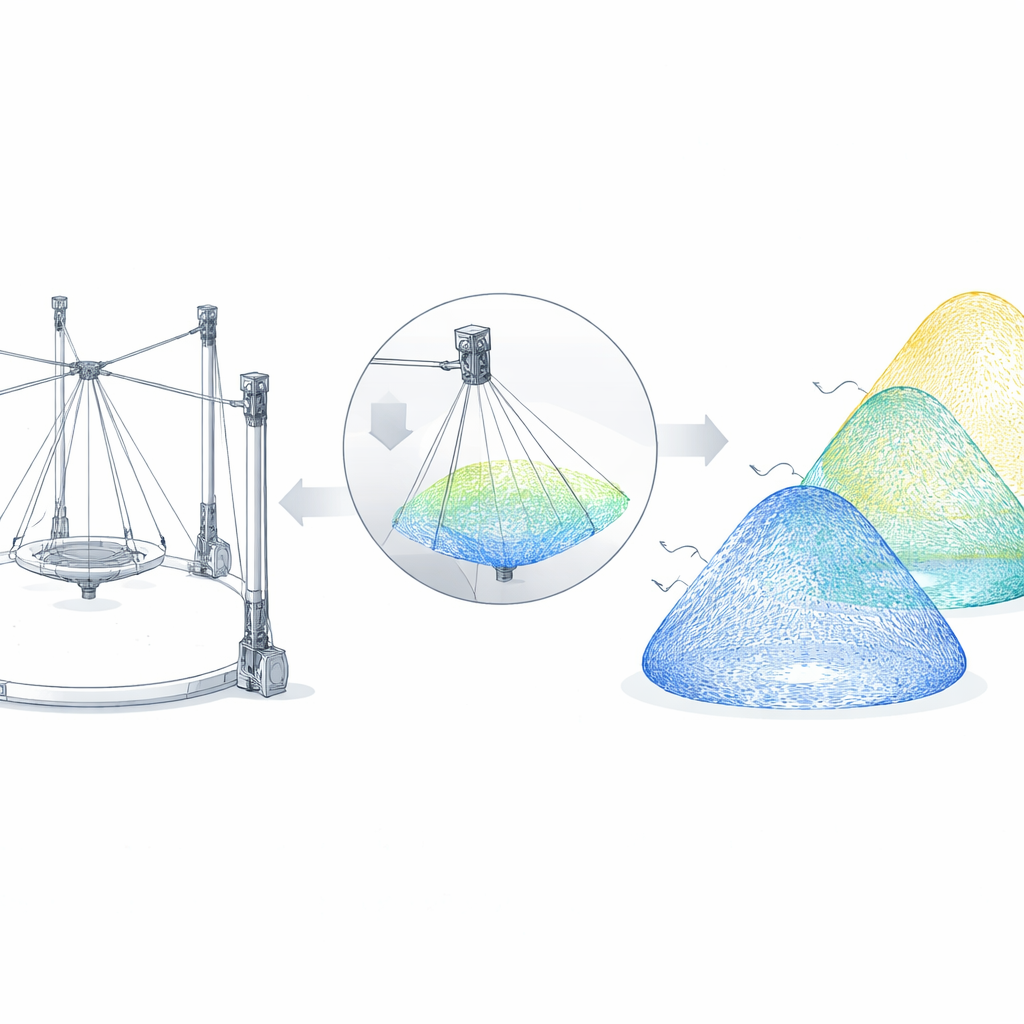
En el centro del estudio está un robot paralelo modular suspendido por cables (MCSPR). En lugar de brazos metálicos fijos, utiliza hasta seis “ramas” idénticas, cada una una torre con motores, poleas y un cable que se conecta a una plataforma móvil central, llamada efector final. Estas ramas se sitúan alrededor de una guía circular y pueden añadirse, retirarse, rotarse o elevarse y descenderse. Al reordenarlas, el mismo hardware puede comportarse como varios robots distintos: con dos ramas se mueve en un plano, con tres o cuatro se desplaza libremente en el espacio, y con cinco o seis también puede inclinar y rotar la plataforma en múltiples direcciones.

Planificar el esqueleto de una máquina que cambia de forma
Diseñar un sistema tan flexible no consiste solo en atornillar piezas. Los autores usan un enfoque sistemático de “síntesis estructural”, tratando cada cable, polea y articulación como un bloque constructivo básico en una red. Con diagramas tipo grafo, mapean cómo se conectan estos elementos para que la plataforma obtenga los grados de libertad deseados —por ejemplo deslizarse a lo largo de tres ejes o rotar en torno a ellos. Este catálogo de módulos y conexiones sirve como caja de herramientas de diseño: según el movimiento que requiera una tarea, un diseñador puede elegir cuántas ramas usar y dónde colocarlas en la guía circular, con la seguridad de que la estructura resultante se comportará según lo previsto.
Saber hacia dónde se moverá la plataforma
Puesto que la plataforma cuelga de cables que solo pueden tirar, no empujar, predecir su movimiento es más complejo que en robots tradicionales. El equipo desarrolla una descripción matemática unificada que funciona para las cinco configuraciones principales del MCSPR. Dada una posición y orientación deseadas de la plataforma, calculan exactamente la longitud que debe tener cada cable y la rapidez con la que debe cambiar esa longitud. Luego construyen un prototipo físico y ordenan a la plataforma que trace una trayectoria espiral suave en el espacio. Sensores a lo largo de los cables registran los movimientos reales, que coinciden estrechamente con los predichos. Esto confirma que el modelo puede dirigir el robot con fiabilidad incluso cuando su geometría se reconfigura.
Encontrar dónde el robot puede mantenerse en equilibrio de forma segura
Igualmente importante es comprender dónde la plataforma suspendida puede permanecer en equilibrio. Si cualquier cable se afloja, se pierde el control. Los autores se centran en lo que llaman el espacio de trabajo de equilibrio estático: la región del espacio donde todos los cables pueden mantenerse con tensión positiva mientras solo la gravedad actúa sobre la plataforma. Usando un enfoque Monte Carlo, muestrean aleatoriamente muchas posiciones y orientaciones posibles de la plataforma y comprueban, para cada una, si las tensiones en los cables necesarias para mantener esa postura están todas dentro de límites seguros. Las muestras aceptadas forman una nube tridimensional que delimita el volumen de trabajo disponible para el robot.
Ampliar el alcance del robot mediante ajuste inteligente
Dado que las ramas del MCSPR pueden cambiar de altura y ángulo, y la plataforma puede llevar cargas de distintas masas y ángulos de inclinación, el tamaño y la forma de este volumen seguro no son fijos. Los investigadores varían sistemáticamente estos factores en una configuración de seis ramas. Muestran que una carga más pesada reduce drásticamente la región donde el robot puede permanecer en pie, mientras que elecciones inteligentes de alturas de las ramas y su separación angular pueden ampliarla. A continuación plantean un problema de optimización: ajustar la carga útil, las alturas de las ramas, los ángulos entre ellas y el rango de inclinación de la plataforma para maximizar el volumen de espacio de trabajo seguro. Ejecutando esta búsqueda por software, encuentran una configuración en la que el espacio alcanzable y equilibrado es varias veces mayor que en una disposición ingenua.
Por qué importa esto para trabajos reales
Para un público no especializado, el mensaje clave es que este robot puede reconfigurarse casi como un kit de construcción, pero aun así puede analizarse y ajustarse con precisión. Al combinar hardware modular con planificación matemática cuidadosa y búsqueda por ordenador, los autores convierten una sola máquina suspendida por cables en una plataforma versátil que puede adaptarse a muchas tareas —desde fabricación de precisión hasta rehabilitación— aprovechando al máximo su espacio operativo y manteniendo las cargas soportadas de forma segura.
Cita: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Palabras clave: robots de cable, robótica modular, mecanismos reconfigurables, espacio de trabajo del robot, manipuladores paralelos