Clear Sky Science · es
Reconocimiento basado en MLS y extracción de parámetros de pernos/cables de techo de carreteras a partir de nubes de puntos 3D
Manteniendo seguros los túneles mineros
Las minas profundas de carbón dependen de pernos y cables metálicos perforados en el techo del túnel para evitar el colapso de la roca. Si estos anclajes están mal colocados o comienzan a fallar, la vida de los trabajadores corre peligro. Sin embargo, hoy en día la verificación de miles de pernos sigue realizándose en gran medida a mano, con cintas métricas y calibres, en túneles oscuros y polvorientos. Este estudio presenta una manera automatizada de “ver” y medir esas líneas de vida ocultas mediante escáneres láser móviles y datos 3D, prometiendo controles de seguridad más rápidos y objetivos para las minas modernas.
Escaneando un túnel en tres dimensiones
Los investigadores construyeron un sistema portátil de escaneo láser móvil diseñado específicamente para vías subterráneas. Montado con un telémetro láser y sensores de movimiento, el dispositivo se lleva o empuja a lo largo del túnel, disparando rápidamente pulsos láser hacia la roca circundante. A medida que se desplaza, una técnica de navegación llamada SLAM (Localización y Mapeo Simultáneos) une las mediciones entrantes en un modelo 3D continuo del túnel. Incluso sin señales GPS, que no llegan al subsuelo, el sistema puede reconstruir la forma de un tramo de vía de 50 metros con precisión a nivel de centímetros, capturando no sólo las superficies rocosas sino también elementos de soporte como pernos, cables y placas de acero.
Limpiando el túnel digital
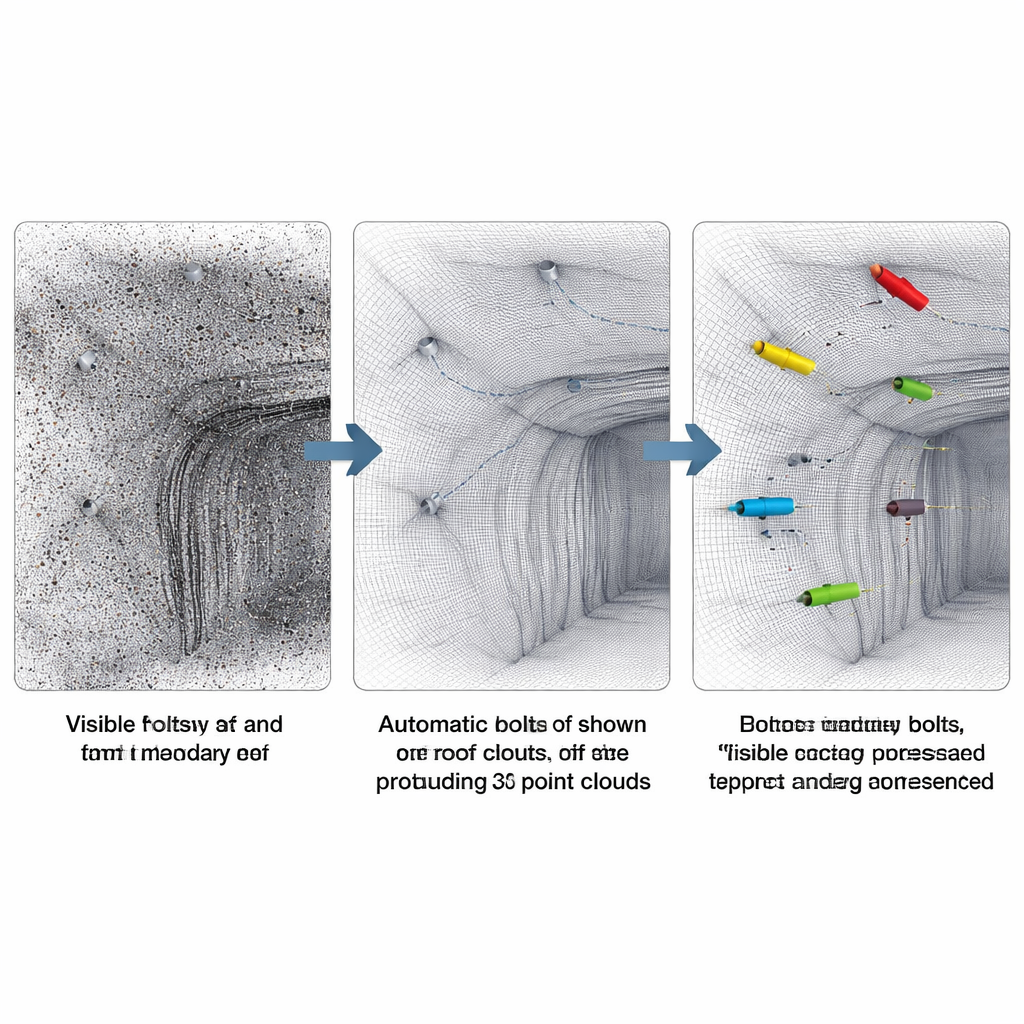
Los escaneos 3D en bruto de una mina son desordenados. El polvo, la neblina de agua, los trabajadores y la maquinaria generan puntos errantes que ensucian los datos. El equipo aplica primero un proceso de reducción de ruido en dos pasos que elimina salientes evidentes mientras recupera superficies reales que podrían haberse descartado por error. Luego aíslan solamente el techo del túnel, ya que es allí donde se anclan los pernos y cables de soporte. Mediante una rotación matemática de los datos, alinean el techo para que quede plano en una orientación estándar, lo que facilita razonar sobre el “arriba” y el “abajo” y medir la dirección y la longitud de cada elemento de soporte de forma consistente en toda la escena.
Dejando que una tela virtual encuentre los pernos
Para separar la superficie del techo del material sujeto a ella, los investigadores usan un truco ingenioso conocido como Filtro de Simulación de Tela (Cloth Simulation Filter). Se imaginan una hoja flexible de tela que se asienta lentamente por gravedad sobre el techo digital invertido. Donde está la roca real, la tela se ajusta a la superficie. Donde sobresale un perno, cable o placa, la tela se pliega sobre el elemento dejando una separación. Midiendo la pequeña diferencia de altura entre la tela y los puntos reales, el algoritmo etiqueta qué puntos pertenecen al techo rocoso liso y cuáles probablemente sean objetos salientes. Parámetros afinados con cuidado aseguran que la tela tenga suficiente detalle para seguir las ondulaciones naturales del techo, pero no tan fina como para “tragarse” accidentalmente los pernos que pretende revelar.
Enseñando al ordenador a contar y medir los soportes
Una vez aisladas las posibles protuberancias, el método aún debe decidir qué grupos de puntos son pernos o cables reales y cuáles son tuberías, cables colgantes o ruido. Aquí, una técnica de agrupamiento basada en densidad agrupa puntos cercanos que forman formas alargadas. El algoritmo ajusta su radio de búsqueda y el tamaño mínimo de clúster para que cada perno normalmente se convierta en un grupo limpio, sin fusionar elementos vecinos. Para cada grupo, un análisis geométrico simple encuentra el eje principal del objeto y proyecta todos los puntos sobre él, proporcionando una estimación de la longitud expuesta y el ángulo de inclinación. Reglas adicionales basadas en el diseño típico de la mina —como el espaciado habitual, el diámetro esperado y el ángulo de instalación permitido— ayudan a filtrar impostores y dejar sólo los soportes verdaderos y correctamente instalados.
De mapas 3D a ideas prácticas de seguridad
El método se probó en una mina de carbón profunda en Mongolia Interior, en cinco tramos consecutivos de techo que contenían 127 pernos y cables etiquetados manualmente con cuidado. El sistema automatizado encontró correctamente 118 de ellos, con sólo algunas omisiones y falsas alarmas, incluso en condiciones desafiantes con polvo, cobertura parcial de shotcrete y piezas metálicas interferentes. Tan importante como eso, generó una base de datos estructurada para cada anclaje: su ubicación exacta, espaciado, longitud sobresaliente del techo y ángulo respecto a la roca. Para los ingenieros de minas, esto convierte una compleja nube de puntos 3D en una lista de comprobación lista para control de calidad y monitorización a largo plazo. Aunque el enfoque aún depende de obtener buenos datos de escaneo y de que al menos parte de cada perno sea visible, apunta hacia un futuro donde las inspecciones rutinarias de seguridad de túneles puedan ser más rápidas, más frecuentes y menos dependientes del juicio subjetivo humano.
Cita: Ren, Z., Zhu, H., Zhao, L. et al. MLS-based recognition and parameter extraction of roadway roof bolts/cables from 3D point clouds. Sci Rep 16, 6538 (2026). https://doi.org/10.1038/s41598-026-37689-3
Palabras clave: escaneo láser móvil, nubes de puntos 3D, inspección de pernos rocosos, seguridad en minería subterránea, monitorización del soporte de túneles