Clear Sky Science · es
Planificación de trayectorias conscientes de la calidad dinámica para brazos robóticos de 6 GDL usando BiRRT y optimización metaheurística basada en trayectorias B-spline
Robots que se mueven con suavidad y seguridad
Los robots industriales ahora comparten espacios de trabajo concurridos con personas, herramientas y sistemas de transporte. En estos espacios reducidos, un brazo robótico no puede limitarse a ir del punto A al punto B; debe hacerlo sin colisiones, con bajo consumo de energía y sin provocar sacudidas que dañen al propio robot o al equipo cercano. Este artículo describe un método práctico para planificar movimientos cuidadosos de un brazo industrial de seis articulaciones, convirtiendo trayectorias aproximadas encontradas por ordenador en movimientos suaves y conscientes de la energía que puedan ejecutarse de forma segura en hardware real de fábrica.
Por qué planificar un simple alcance es sorprendentemente difícil
Cuando un brazo robótico se mueve, hay que equilibrar muchas exigencias simultáneamente. La trayectoria debe ser corta para acabar las tareas rápido, el uso de energía debe ser moderado para limitar el calor y el desgaste, y el movimiento debe ser lo bastante suave para que el brazo no pegue tirones ni vibre. Los enfoques clásicos trazan curvas matemáticas suaves (como splines) a través de unos pocos puntos de paso seleccionados a mano, lo que funciona bien en espacio abierto pero puede volverse ineficiente o incluso inseguro en celdas congestionadas. Métodos de muestreo más recientes, como Rapidly Exploring Random Trees (RRT), son buenos para abrirse camino entre campos de obstáculos complejos, pero tienden a producir rutas con giros bruscos que dañan motores y engranajes. Los autores sostienen que ninguna de estas familias de métodos es suficiente por sí sola; en su lugar, las combinan en un marco de trabajo de dos etapas.
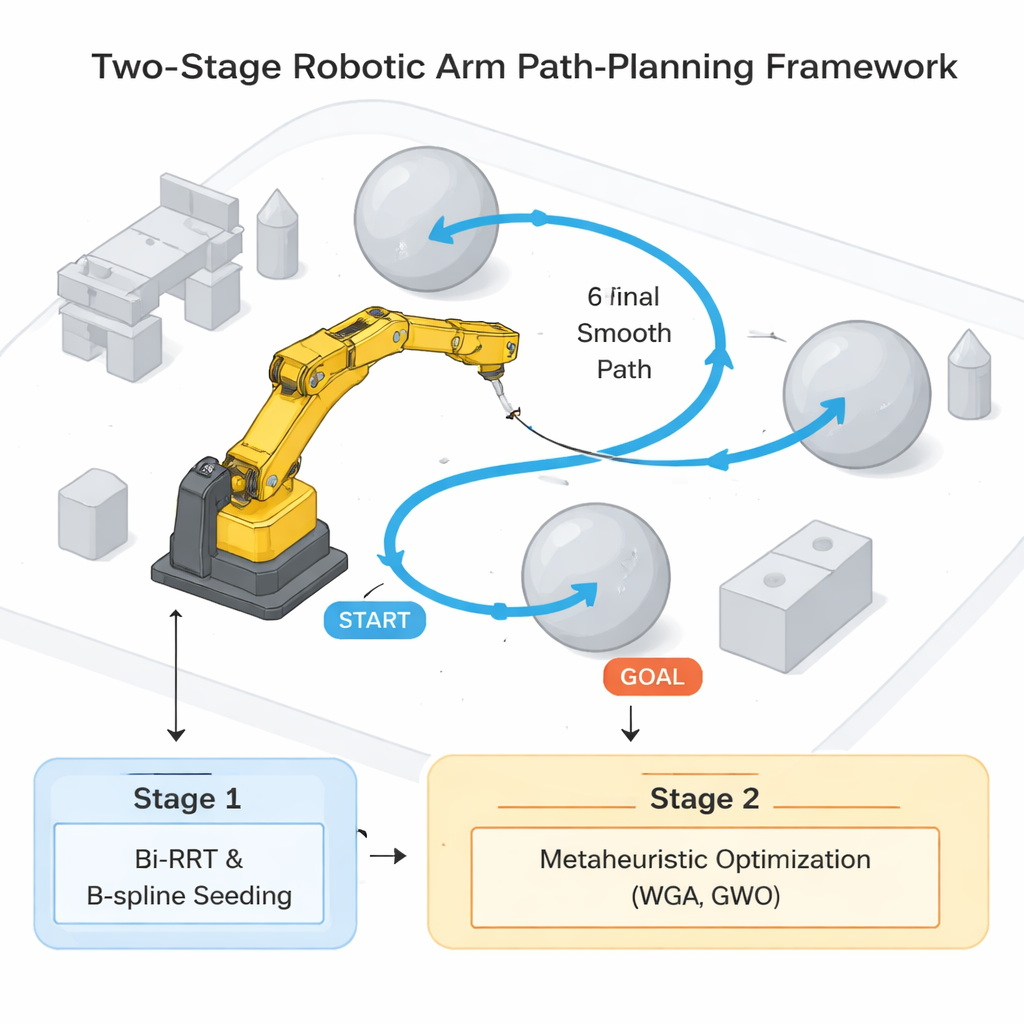
Un mapa de ruta en dos etapas para el movimiento del robot
En la primera etapa, el equipo construye una “ruta de referencia” segura en el espacio de articulaciones del robot en lugar de limitarse a la posición de la herramienta en el espacio. Parten de una curva B-spline suave que conecta las posiciones inicial y final sorteando obstáculos esféricos con un margen de seguridad. Esta curva guía entonces a un planificador RRT bidireccional (Bi-RRT) que hace crecer dos árboles aleatorios —desde el inicio y desde la meta— hasta que se unen formando una trayectoria libre de colisiones. En el proceso, cada movimiento tentativo del brazo completo se comprueba frente a formas de obstáculo simplificadas. Una vez que se encuentra una trayectoria, se recortan las curvas redundantes mediante “atajos” y el resultado se reexpresa como una spline parametrizada en el tiempo que, en principio, el robot podría seguir.
Enseñar al robot a moverse con más suavidad
La segunda etapa toma esta trayectoria factible pero imperfecta y la ajusta para mejorar su calidad. Aquí, los autores usan dos métodos de optimización inspirados en la naturaleza: un algoritmo híbrido Ballena–Genético (WGA) y el Optimizador Lobo Gris (GWO). Ambos actúan sobre un conjunto limitado de puntos de control y parámetros de tiempo a lo largo de la spline original, pero solo se les permite mover esos puntos dentro de corredores seguros precomputados alrededor de la trayectoria. Cada movimiento candidato se evalúa mediante una medida combinada única que mezcla tres ingredientes: la distancia recorrida por la herramienta, la energía a nivel de articulaciones utilizada (basada en las características de cada motor) y la “sacudida” de las articulaciones —qué tan rápido cambian sus aceleraciones en el tiempo. Al proponer, probar y mejorar repetidamente trayectorias candidatas, estos optimizadores buscan movimientos que sigan libres de colisiones pero mucho más suaves y listos para la ejecución.
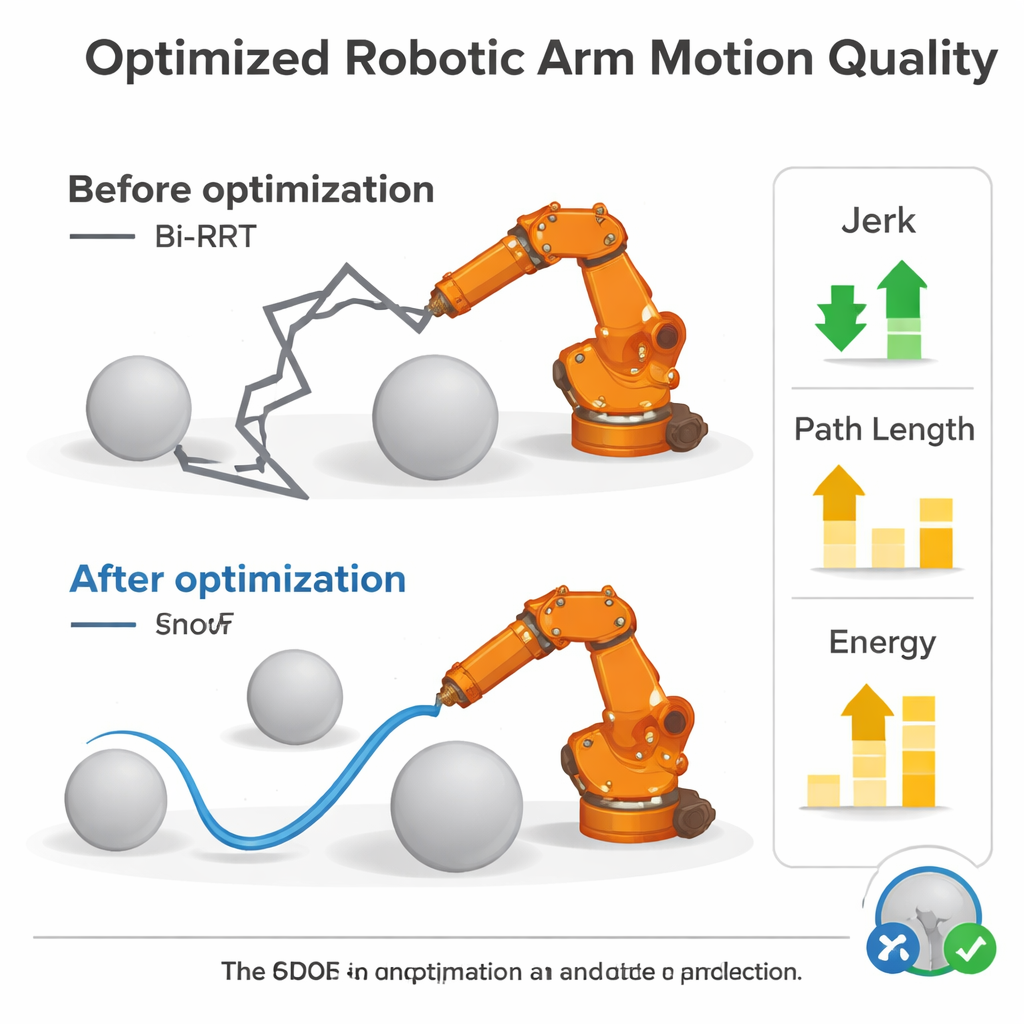
Qué revelan las simulaciones
Los autores prueban su canalización en un modelo digital de un brazo industrial ampliamente usado, el KUKA KR 4 R600, moviéndose por una escena con tres obstáculos durante un desplazamiento fijo de dos segundos. Una solución basada únicamente en splines ya es razonablemente suave pero no explota de forma sistemática todas las rutas seguras posibles. Un Bi-RRT con atajos encuentra una trayectoria de longitud geométrica similar e incluso con menor consumo de energía, pero con un gran inconveniente: su índice de jerk —un indicador de la brusquedad con que las articulaciones cambian su aceleración— es aproximadamente diez veces mayor, lo que señala un movimiento que probablemente excitaría vibraciones y tensión en una máquina real. Tras aplicar WGA o GWO, el jerk se reduce en torno a un 94–96 por ciento respecto a esa trayectoria Bi-RRT sin refinar. Este suavizado drástico implica solo aumentos modestos en la distancia recorrida (unos 15–17 por ciento) y en la energía (aproximadamente el doble), un compromiso que los autores consideran muy aceptable para equipos reales.
De la teoría al taller
Para un lector no especialista, la conclusión clave es que los autores ofrecen una receta concreta —y herramientas basadas en MATLAB— para transformar la primera idea aproximada de un robot sobre cómo moverse en un movimiento pulido y compatible con el hardware. Su enfoque garantiza primero que existe una trayectoria a través de un entorno congestionado y luego remodela esa trayectoria para que el brazo se mueva con menos sacudidas respetando todos los límites de articulación y las distancias de seguridad. El resultado final es una familia de movimientos que un robot industrial real puede ejecutar de forma más segura y fiable, sentando las bases para futuras extensiones en las que los robots compartan espacios con humanos y adapten sus movimientos en tiempo real usando cámaras e incluso interfaces de señales cerebrales.
Cita: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Palabras clave: planificación de trayectorias robóticas, brazo robótico industrial, evitación de colisiones, suavidad del movimiento, optimización metaheurística