Clear Sky Science · es
Escalado seguro de formaciones y planificación de movimientos para equipos heterogéneos UAV–UGV en entornos con obstáculos
Robots que se coordinan en el aire y en tierra
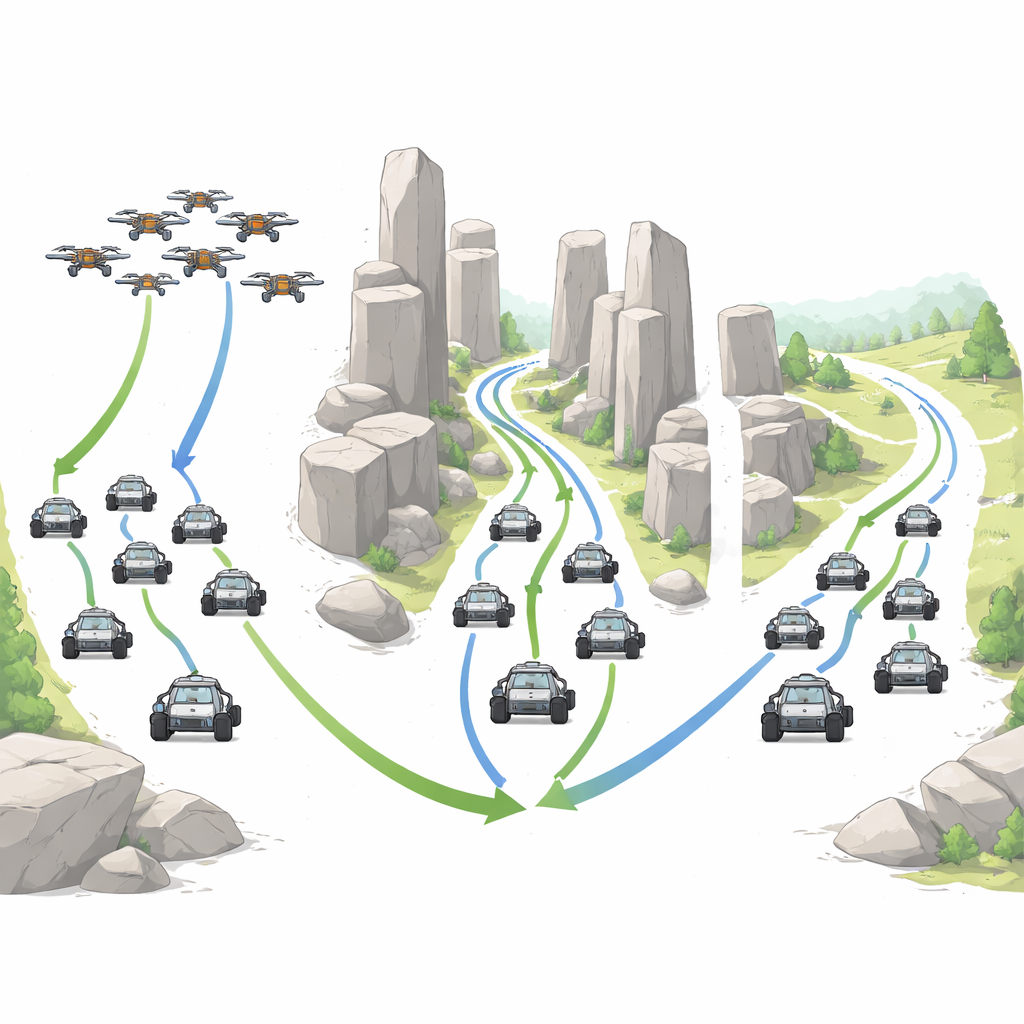
Imagine un enjambre de pequeños drones voladores explorando sobre una zona siniestrada mientras vehículos terrestres resistentes se abren paso entre los escombros abajo, todos moviéndose como un equipo coordinado. Este artículo explora cómo mantener juntos a esos grupos mixtos de robots en espacios estrechos y llenos de obstáculos sin colisiones ni replanificaciones frenéticas. Los autores proponen una nueva forma para que robots aéreos y terrestres compartan una formación estable, se deslicen por huecos estrechos y, aun así, lleguen al objetivo de forma rápida y segura.
Por qué es difícil coordinar equipos mixtos de robots
Los drones voladores y los vehículos terrestres con ruedas se comportan de manera muy distinta. Los drones se desplazan por un espacio tridimensional y son fácilmente desviados por el viento. Los vehículos terrestres deben respetar límites de giro y afrontar terrenos irregulares. Sin embargo, muchas misiones reales —desde búsqueda y rescate hasta inspección de infraestructuras— se beneficiarían si estos robots pudieran viajar juntos como un único grupo tridimensional. Los métodos existentes suelen tratar el mantenimiento de la formación y la evitación de obstáculos como problemas separados. Cuando el entorno está muy lleno, las formaciones tienden a romperse y volver a reagruparse después, perdiendo tiempo y aumentando el riesgo de colisiones.
Una nueva forma de mantener al grupo unido
Para abordar esto, los autores diseñan un marco que llaman RG–ASAPF, que acopla de forma estrecha la forma de la formación y su movimiento. En su núcleo hay una descripción matemática de la formación como una estructura "rígida": las distancias deseadas entre robots se eligen de modo que la forma general quede determinada de manera única, como las barras de un andamiaje 3D estable. Cada robot usa entonces una regla compartida para ajustar su movimiento de modo que esas distancias se recuperen y mantengan, incluso mientras la formación se desplaza y gira. Esta regla está pensada para funcionar tanto con robots voladores como terrestres, y se adapta en línea a incertidumbres como fricciones no modeladas o pequeñas perturbaciones externas.
Permitir que la formación "respire" al pasar por espacios estrechos
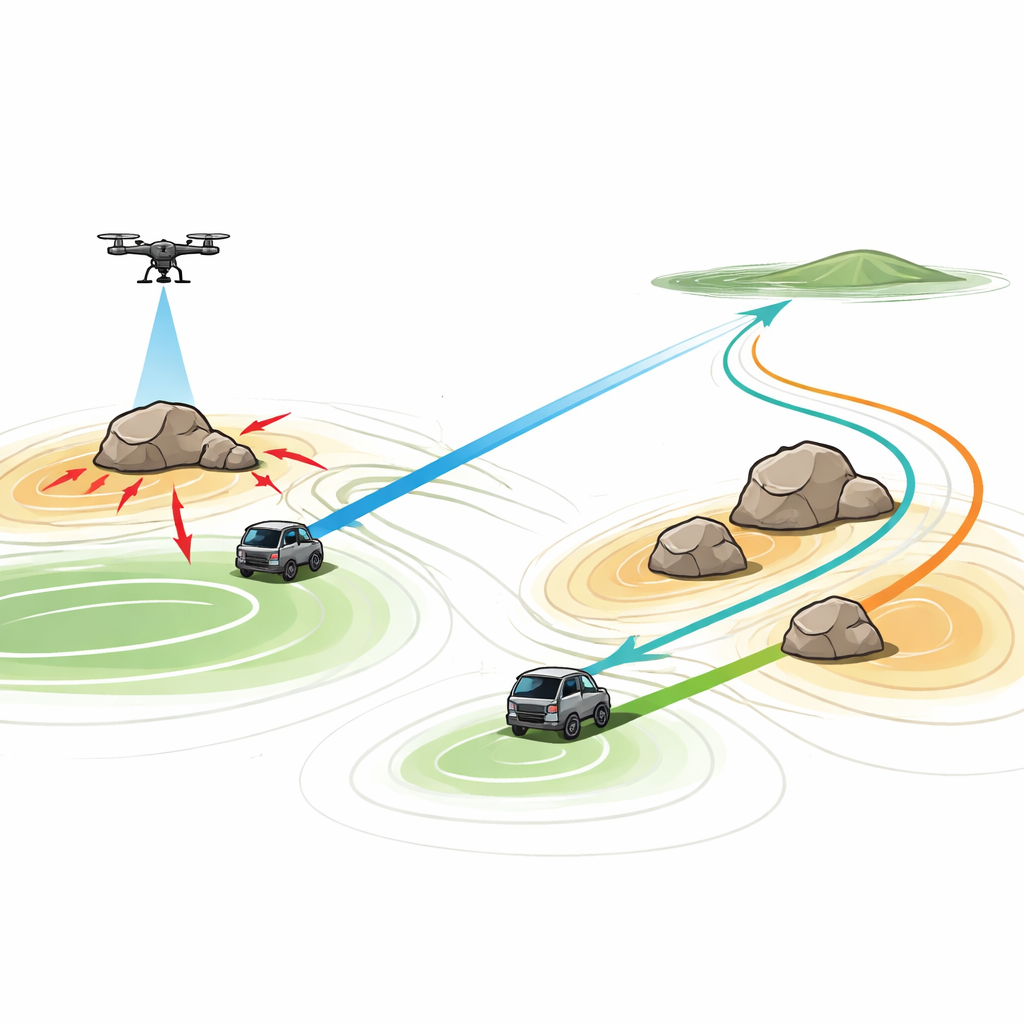
Los entornos reales rara vez son campos abiertos; están llenos de edificios, árboles, vehículos y objetos en movimiento. Una formación que es segura en espacio abierto puede ser demasiado grande para pasar por un callejón estrecho o un denso grupo de obstáculos. El método propuesto permite que la formación se escale de forma suave —encogiendo o expandiendo su tamaño global— mientras preserva su estructura básica. El equipo introduce un vehículo líder en tierra que planifica un camino usando un campo potencial artificial, donde el objetivo actúa como atractor y los obstáculos empujan a la formación hacia afuera. A diferencia de los campos potenciales tradicionales, que pueden quedarse atascados en callejones sin salida o provocar movimientos inestables, su versión "adaptativa segura" ajusta continuamente la intensidad con que los obstáculos repelen a los robots para que mantengan una distancia segura sin volverse excesivamente cautelosos o quedar atrapados.
Rutas más inteligentes a través del desorden y el movimiento
El campo potencial se refina adicionalmente para que el "paisaje" general de atracción y repulsión tenga siempre su punto más bajo en el objetivo. Esto ayuda a evitar que la formación quede varada en posiciones incómodas entre obstáculos. La fuerza del efecto repulsivo se ajusta sobre la marcha usando una regla de aprendizaje simple tomada del entrenamiento temprano de redes neuronales. Cuando los robots se acercan demasiado a los obstáculos, la repulsión crece automáticamente; cuando hay suficiente margen, se relaja. Si el entorno se vuelve tan estrecho que ni siquiera una formación reducida puede pasar con seguridad, el método activa una medida de respaldo: el equipo hace una breve pausa, infla un corredor de seguridad notional y replanifica una ruta más segura alrededor de la zona problemática antes de continuar.
Pruebas en mundos virtuales
Para evaluar el desempeño del método, los autores ejecutan extensas simulaciones por ordenador con equipos mixtos de drones y vehículos terrestres. Prueban áreas abiertas con pocos obstáculos, laberintos densos con muchas barreras, escenas con obstáculos en movimiento y formaciones que deben transformarse en formas 3D más complejas, como un prisma hexagonal. En todos estos casos, la formación se mantiene unida en tres dimensiones, evita de forma segura obstáculos estáticos y móviles, y ajusta su tamaño cuando es necesario. Los robots siguen trayectorias suaves y eficientes en lugar de zigzaguear alrededor de las barreras. Comparado con varios métodos populares de planificación —incluidos campos potenciales clásicos y mejorados, optimización por enjambre de partículas y control predictivo de modelos lineales y no lineales—, el nuevo enfoque encuentra rutas que suelen ser más cortas, más suaves y menos costosas energéticamente, además de computarlas más rápido que las técnicas pesadas basadas en optimización.
Qué significa esto para misiones en el mundo real
Para un lector no especializado, el mensaje clave es que el artículo muestra cómo hacer que equipos mixtos de robots voladores y terrestres se muevan como un único cuerpo flexible a través de espacios 3D llenos de obstáculos. En lugar de romper la formación cada vez que aparecen obstáculos, el grupo puede doblarse, encogerse y reorientarse mientras se mantiene coherente y seguro. Esto podría traducirse en un apoyo robótico más rápido y fiable durante desastres, inspecciones industriales y patrullas de seguridad. Aunque el trabajo actual se demuestra en simulaciones y depende de un vehículo líder designado, los autores esbozan pasos futuros hacia equipos más tolerantes a fallos y experimentos en el mundo real, acercando la visión de enjambres coordinados aire–tierra a la práctica.
Cita: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Palabras clave: formación multi-robot, cooperación UAV UGV, evitación de obstáculos, planificación de movimiento, robótica en enjambres