Clear Sky Science · es
Un exoesqueleto de teleoperación para el miembro superior con parametrización continua de la longitud del brazo y fusión de impedancia adaptativa activada por fuerza
Trabajo presencial más seguro desde una distancia segura
Muchas de las tareas más peligrosas en la Tierra—y en el espacio—siguen requiriendo juicio y destreza humanos. Piense en reparar una instalación nuclear dañada, manipular explosivos o estabilizar una nave espacial. Este estudio presenta un nuevo tipo de exoesqueleto motorizado para el brazo que permite a una persona controlar un brazo robótico distante como si fuera propio, manteniéndose lejos del peligro. El dispositivo se centra en lograr que el robot se mueva y “se sienta” como una extensión natural del cuerpo del usuario, incluso cuando se adapta a distintas longitudes de brazo y a fuerzas cambiantes en el entorno.
Por qué importan los brazos remotos
Los robots ya trabajan bajo el agua, en zonas de desastre y dentro de reactores, pero la mayoría están preprogramados o se guían con joysticks sencillos. Eso limita lo que pueden hacer cuando las condiciones cambian de repente. Los sistemas de teleoperación—donde una persona controla un robot remoto en tiempo real—ofrecen un camino intermedio, combinando la toma de decisiones humana con la fuerza y el alcance robóticos. Los sistemas anteriores podían desplazar herramientas, pero a menudo carecían de retroalimentación precisa sobre las fuerzas y no se adaptaban fácilmente a los cuerpos de distintos usuarios. El resultado era movimiento torpe, mala “sensación” y esfuerzo extra tanto para el operador como para la máquina.
Un brazo robotizable que realmente encaja
El equipo construyó un exoesqueleto portátil para el miembro superior con siete articulaciones motorizadas que se alinean con el hombro, el codo y la muñeca. Materiales ligeros como la fibra de carbono y el aluminio mantienen el dispositivo ágil en lugar de pesado y lento. Una innovación importante es que la longitud del húmero y del antebrazo del exoesqueleto puede ajustarse de forma continua, no en unos pocos pasos fijos. Rieles deslizantes con sensores eléctricos integrados miden de forma continua la longitud real del brazo del usuario y alimentan esa información a un modelo corporal digital. Como resultado, el dispositivo reconfigura automáticamente su geometría interna para cada persona, mejorando la comodidad y haciendo que los movimientos del robot reflejen con mayor fidelidad las intenciones del humano. 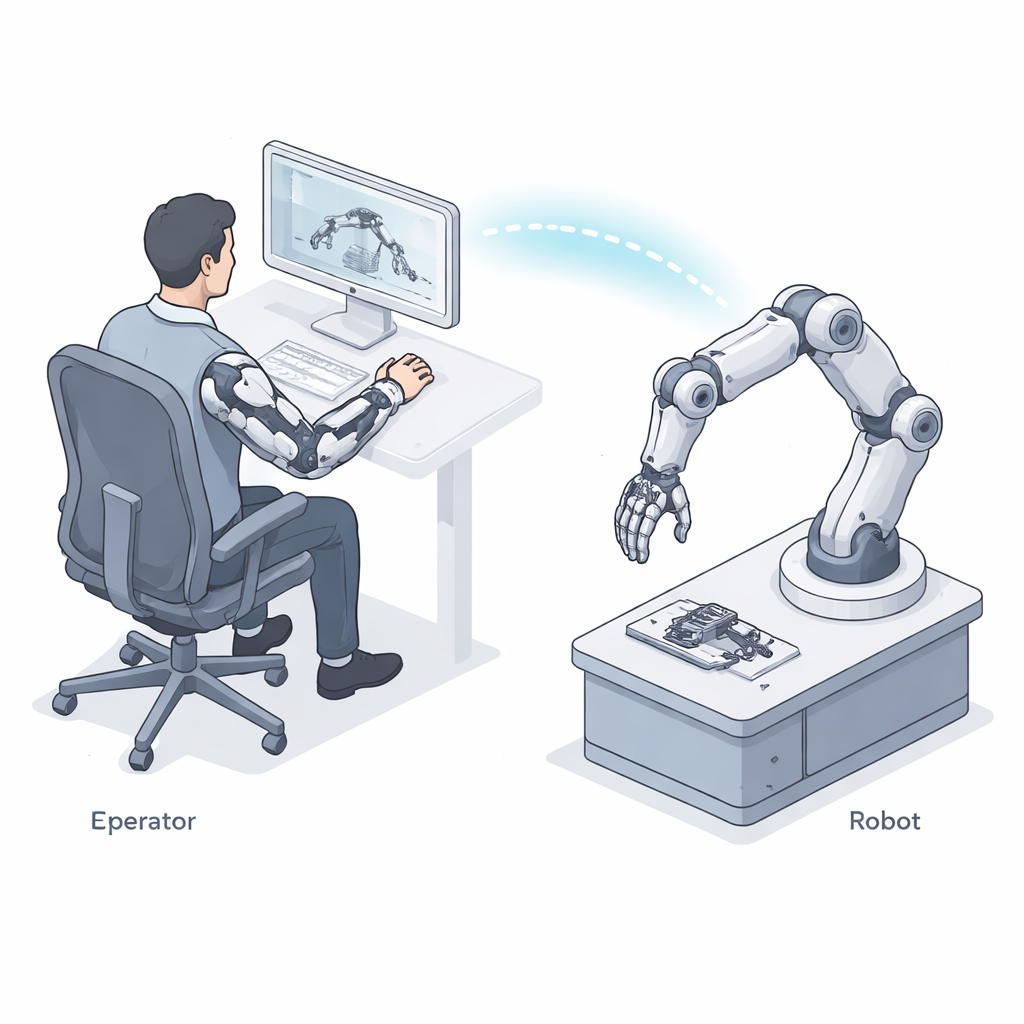
Moverse con el cuerpo, no en su contra
Los hombros humanos no solo giran como bisagras; la escápula también se desliza sobre la caja torácica. Muchos exoesqueletos ignoran esto y acaban oponiéndose al movimiento natural, provocando molestias. Este diseño añade un módulo pasivo con varios grados de libertad extra que sigue de forma silenciosa los sutiles desplazamientos del hombro y la parte superior del cuerpo, aliviando la presión sobre la piel y las articulaciones. Al mismo tiempo, las articulaciones motorizadas se ajustan para que su par—la fuerza de torsión—permanezca por debajo de límites seguros para el tejido humano. Paradas de emergencia y detectores de atascos complementan las funciones de seguridad, permitiendo que el sistema reaccione rápidamente si algo va mal.
Una forma más inteligente de sentir el contacto
Más allá de la mecánica, los autores se centran en lo que percibe el usuario. Cuando el robot remoto toca o empuja algo—una pared, la empuñadura de una herramienta u otro objeto—esas fuerzas se traducen de vuelta a través del exoesqueleto para que el usuario sienta resistencia. El sistema de control combina dos necesidades que normalmente chocan: el seguimiento preciso de los movimientos del operador y un comportamiento compliant y suave cuando las fuerzas de contacto aumentan. A bajas fuerzas, el sistema actúa rígido y preciso, siguiendo de cerca la trayectoria del brazo del usuario. A medida que las fuerzas superan un umbral de seguridad, el control se suaviza automáticamente, permitiendo cierta elasticidad para que los impactos sean amortiguados en lugar de bruscos. Los autores emplean herramientas matemáticas basadas en la energía para mostrar que este comportamiento combinado permanece estable en lugar de degenerar en oscilaciones. 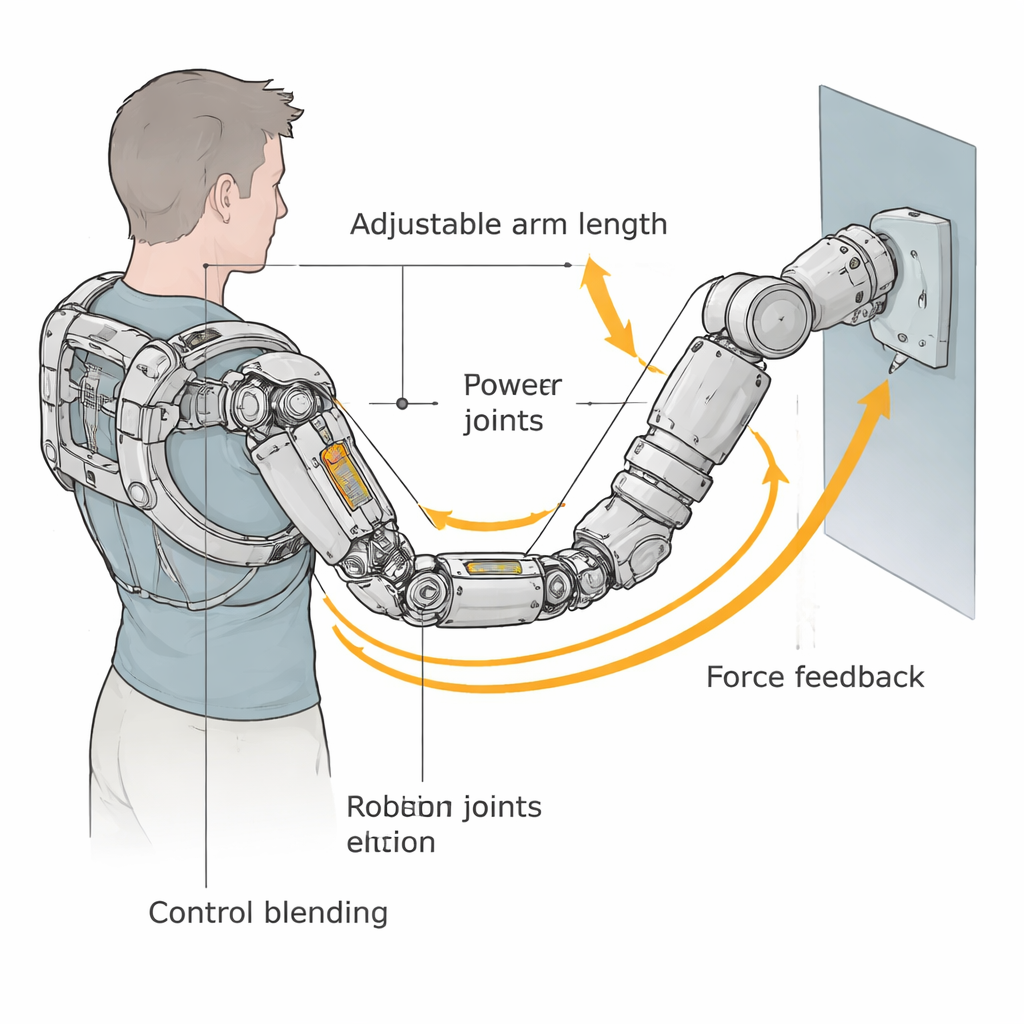
Poniendo el sistema a prueba
Para evaluar el exoesqueleto, los investigadores lo conectaron a un brazo robótico industrial ampliamente usado. Cuando una persona que llevaba el exoesqueleto trazó una trayectoria en forma de ocho en el aire, el robot remoto reprodujo el movimiento con fidelidad, a pesar de pequeños retrasos en la comunicación. Pruebas adicionales examinaron el funcionamiento del sensor de longitud de brazo: las lecturas de voltaje de los sensores deslizantes coincidieron con mediciones físicas con errores de menos de unos pocos milímetros, incluso después de repetir las operaciones de colocación y retirada. En simulaciones controladas donde el robot presionó contra una pared rígida virtual, el esquema de control completo redujo las fuerzas de contacto máximas en casi un 70 por ciento en comparación con una configuración básica, al tiempo que conservó en gran medida la precisión de seguimiento en movimiento libre.
Qué significa esto para el trabajo y la atención en el mundo real
En términos cotidianos, esta investigación nos acerca a robots remotos que se sienten tan naturales y seguros de controlar como mover el propio brazo. Al combinar un armazón ajustable que se ajusta al cuerpo, un seguimiento cuidadoso del movimiento humano y una retroalimentación de fuerza inteligente que se adapta en tiempo real, el sistema promete una teleoperación más precisa y menos fatigante en entornos peligrosos. La misma tecnología también podría servir a pacientes en recuperación de un ictus, permitiendo a los terapeutas guiar y registrar los movimientos del brazo mientras los pacientes reciben asistencia y retroalimentación realistas. A medida que versiones futuras integren señales de los músculos y de la mirada, y aprendan de la experiencia, dichas parejas exoesqueleto-robot pueden convertirse en herramientas versátiles tanto para misiones extremas como para la rehabilitación cotidiana.
Cita: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Palabras clave: exoesqueleto de teleoperación, control de brazo robótico, retroalimentación de fuerza, robótica de rehabilitación, operaciones remotas en entornos peligrosos