Clear Sky Science · es
Protocolo de respuesta de emergencia integral para accidentes en túneles ampliado con aprendizaje por refuerzo
Por qué importan rescates en túneles más inteligentes
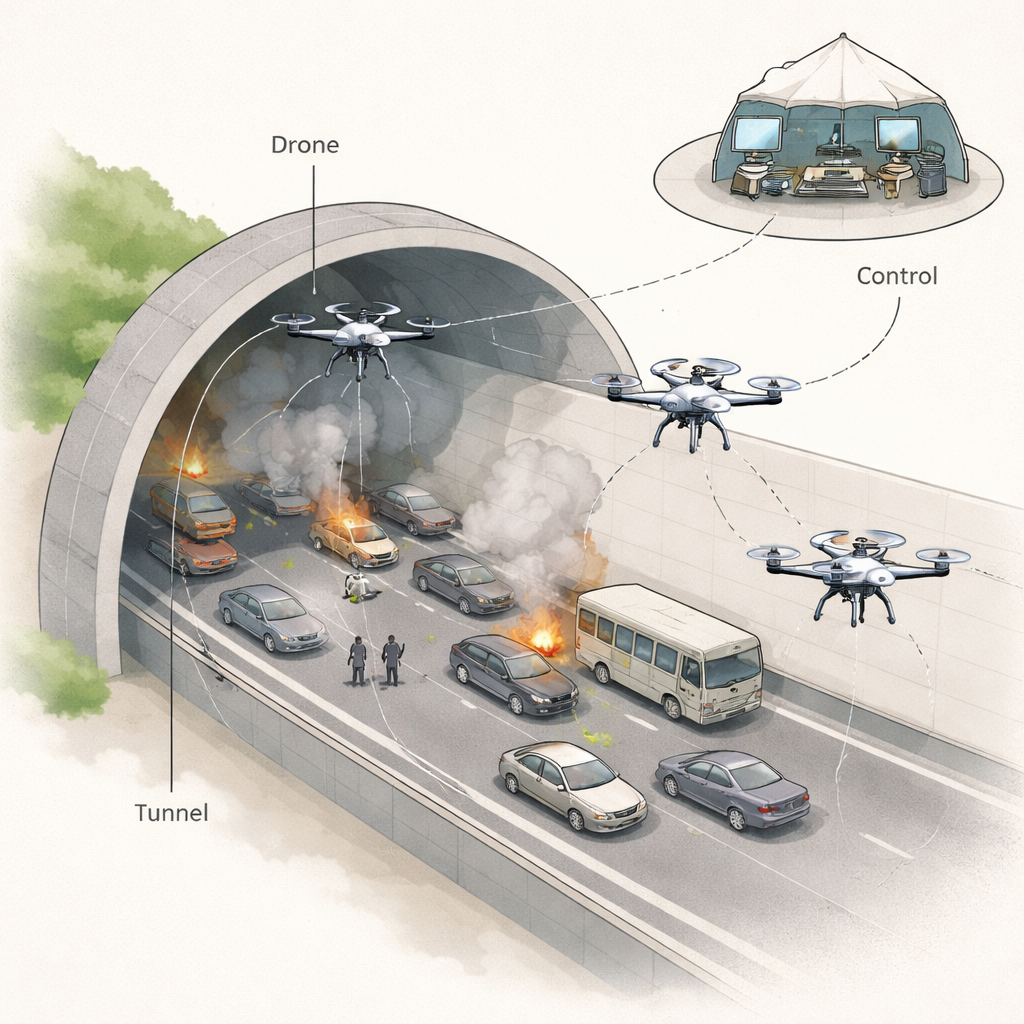
Cuando ocurre un desastre en un túnel vial —ya sea por un choque, un incendio o un derrumbe estructural— las personas pueden quedar atrapadas en un tubo largo y lleno de humo, parecido a un laberinto, con muy pocas salidas. Los rescatadores humanos deben entrar justo cuando la visibilidad cae, las temperaturas aumentan y los escombros bloquean el paso. Este estudio explora cómo pequeños robots voladores, o drones, guiados por una estrategia de aprendizaje ingeniosa, podrían convertirse en ayudantes rápidos y fiables en estas situaciones peligrosas, encontrando víctimas y trazando rutas seguras mientras mantienen a los equipos humanos fuera de los peores riesgos.
Cuellos de botella subterráneos peligrosos
Las ciudades modernas dependen de túneles para autopistas, trenes y servicios, pero el mismo diseño cerrado que los hace eficientes también vuelve los accidentes en su interior excepcionalmente mortales. Los incendios propagan humo con rapidez, se acumulan gases tóxicos y los pasillos estrechos pueden obstruirse con vehículos accidentados o concreto caído. Los equipos de rescate tradicionales a menudo entran con información limitada, adivinando hacia dónde ir mientras sus radios luchan por funcionar a través de gruesa roca y hormigón. Desastres pasados en China y Japón, entre otros, han mostrado lo difícil que es alcanzar a las víctimas a tiempo, subrayando la necesidad de herramientas que puedan ver y anticipar de formas que los humanos no pueden.
Enseñar a los drones a explorar y buscar
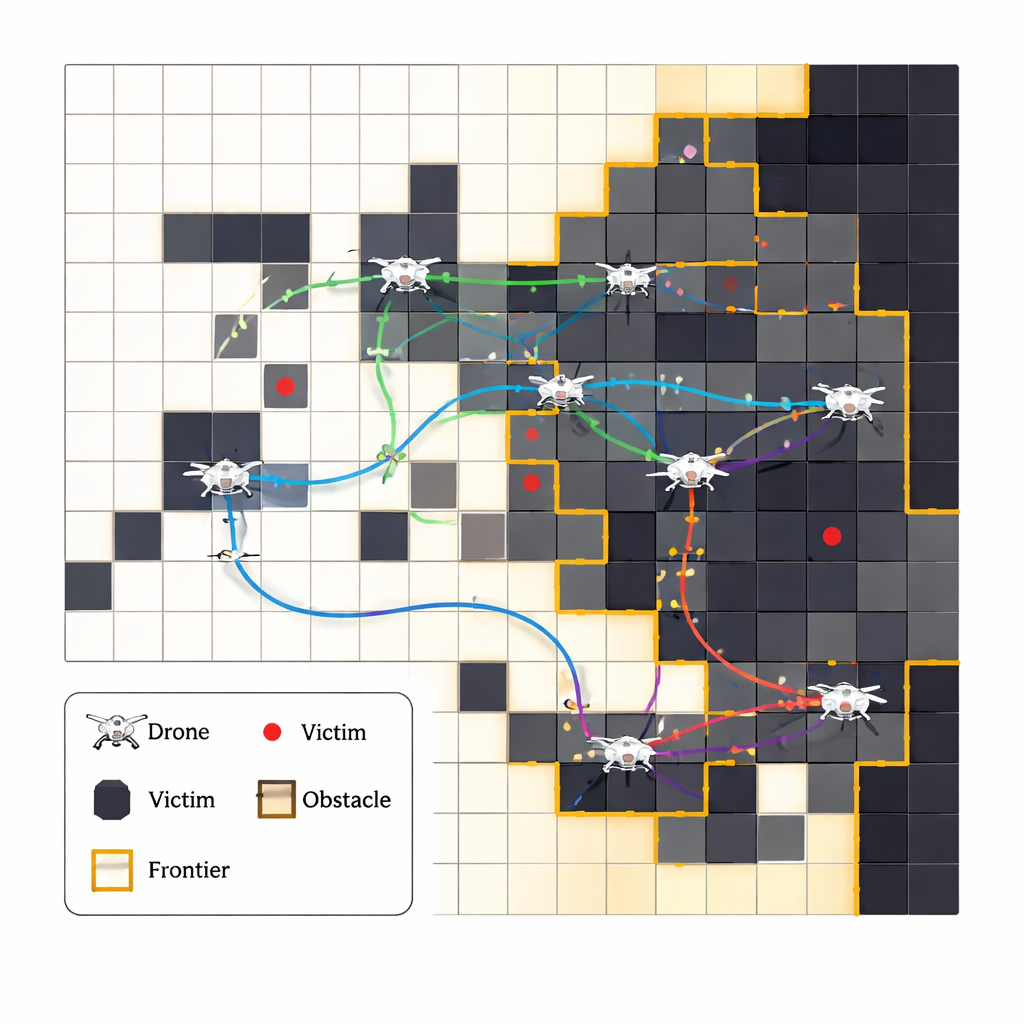
Los autores proponen un sistema en el que varios drones autónomos trabajan juntos para explorar un túnel dañado, construir un mapa en tiempo real y localizar personas atrapadas. En lugar de seguir una ruta fija y preprogramada, cada drone aprende de la experiencia usando un método llamado aprendizaje por refuerzo: intenta acciones, observa lo que ocurre y descubre gradualmente qué decisiones tienden a conducir a rescates más rápidos y a menos errores. El túnel se representa como una rejilla de celdas, y los drones se concentran en «fronteras» donde el espacio conocido se encuentra con lo desconocido, empujando esa frontera hacia afuera de forma constante. En cada paso, eligen entre un pequeño conjunto de movimientos de la rejilla, actualizando sus tablas internas sobre qué movimientos funcionaron mejor en situaciones similares anteriormente.
Hacer que muchos robots cooperen sin mucho ruido
Hacer que varios drones busquen el mismo túnel a la vez plantea un nuevo desafío: ¿cómo evitan chocar entre sí o volver a escanear la misma zona, especialmente cuando la comunicación puede ser poco fiable? En lugar de dotarlos de un jefe central o de conversación radio constante, los investigadores diseñan un sistema de puntuación sencillo que fomenta de forma discreta un buen comportamiento grupal. Un drone obtiene una gran recompensa cuando descubre una nueva víctima, pero se le penaliza si pierde tiempo revisitando el mismo lugar, colisiona con otro drone o «falla» al agotar su batería. Con el tiempo, esto empuja a cada drone a favorecer regiones inexploradas y a mantenerse alejado de sus compañeros, de modo que surge una especie de cooperación de forma natural a partir de las consecuencias compartidas, aunque técnicamente cada uno aprenda por su cuenta.
Tomando recursos de los lobos para evitar quedarse atascados
El aprendizaje puro por prueba y error a veces puede quedarse atrapado en hábitos seguros pero subóptimos —por ejemplo, elegir siempre un pasillo conocido en vez de probar un atajo arriesgado. Para mantener la curiosidad de los drones, el equipo toma ideas de un modelo matemático de cómo los lobos grises cazan en manada. Este componente de «Optimización del Lobo Gris» empuja a los drones a imitar ocasionalmente los patrones de búsqueda de mejor rendimiento observados hasta ese momento, sin dejar de dejar espacio para la exploración. En la práctica, moldea qué nuevas acciones se prueban, ayudando al proceso de aprendizaje a salir de callejones sin salida y a adaptarse cuando el túnel cambia —por ejemplo, si parte de la ruta queda bloqueada repentinamente por fuego o escombros.
Probar el enfoque en desastres virtuales
Dado que no es seguro poner a prueba estrategias no demostradas en túneles de emergencia reales, los investigadores construyen simulaciones por ordenador detalladas que imitan pasillos estrechos, callejones sin salida, obstáculos y víctimas dispersas. Comparan su sistema basado en aprendizaje con varios otros métodos, incluyendo deambular puramente al azar y optimización independiente sin aprendizaje. Tanto en pruebas con un solo drone como con varios, su enfoque encuentra víctimas más rápido, explora más del túnel con menos pasos desperdiciados y evita colisiones con mayor fiabilidad. Es importante que todo esto se haga utilizando cálculos ligeros basados en tablas en lugar de redes de aprendizaje profundo que consumen mucha energía, lo que significa que podría ejecutarse de forma realista en pequeños ordenadores a bordo durante una emergencia real.
Qué podría significar esto para futuros rescates
El estudio demuestra que enjambres de drones relativamente simples, guiados por reglas de aprendizaje cuidadosamente diseñadas y algunas ideas tomadas de la naturaleza, podrían convertirse en socios valiosos para bomberos y equipos de rescate en desastres en túneles. Al mapear rápidamente entornos humeantes y cambiantes y centrarse en ubicaciones probables de víctimas sin control humano constante, dichos sistemas podrían recortar minutos preciosos en los tiempos de respuesta mientras reducen los riesgos para los primeros intervinientes. Aunque el trabajo hasta ahora se basa en simulaciones y sensores ideales, sienta una base práctica para futuros sistemas del mundo real que deben operar con límites estrictos de tiempo, energía y computación en algunos de los entornos de rescate más exigentes del planeta.
Cita: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Palabras clave: respuesta de emergencia en túneles, drones de búsqueda y rescate, aprendizaje por refuerzo multiagente, gestión robótica de desastres, exploración autónoma