Clear Sky Science · es
Estimación en tiempo real del SOC de la batería y estrategia de carga autónoma para robot de almacenamiento de energía dinámico con filtro de Kalman extendido
Por qué importan baterías más inteligentes para robots
Desde mensajeros en almacenes hasta robots de inspección, la utilidad de los robots móviles está condicionada por sus baterías. Si un robot calcula mal cuánta energía le queda, puede detenerse lejos de un punto de carga, interrumpiendo su trabajo y arriesgando daños en la batería. Este artículo presenta una forma nueva para que los robots “conozcan” su nivel real de carga en tiempo real y elijan cuándo y cómo recargarse, de modo que puedan trabajar más tiempo, con mayor seguridad y con menos supervisión humana.

Robots, tareas intensas y baterías sometidas a estrés
A diferencia de los coches eléctricos que circulan con suavidad por autopistas, muchos robots móviles afrontan arranques bruscos, paradas y cambios frecuentes de carga de trabajo. Estos sacudones provocan oscilaciones rápidas en corriente y voltaje de la batería, lo que confunde los métodos tradicionales de estimación de carga restante. Los métodos simples que leen el voltaje de la batería o que solo integran la corriente en el tiempo suelen asumir condiciones tranquilas y estables y no tienen en cuenta cómo envejece o se calienta la batería. Como resultado, sus estimaciones derivan, los errores se acumulan y el robot puede bien recargarse con demasiada frecuencia o exigir demasiado a la batería, acortando su vida útil.
Un modelo más realista de lo que ocurre dentro de la batería
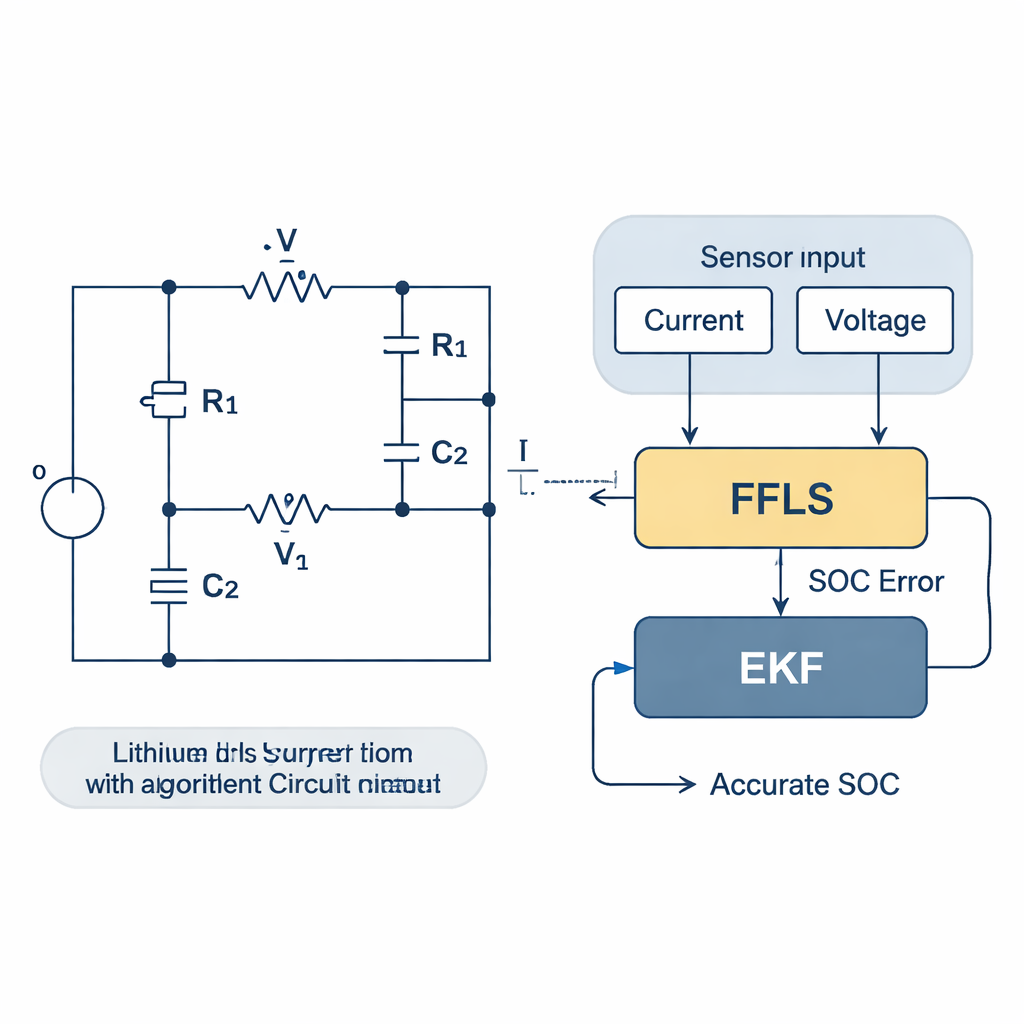
Los autores abordan esto dotando al robot de una imagen más realista de su pack de baterías de fosfato de hierro y litio. En lugar de tratar la batería como una caja negra con un único número de voltaje, la representan como una red eléctrica con resistencia interna y dos ramas de “polarización” que imitan cómo los iones se mueven y se acumulan dentro de la celda. Este modelo RC de segundo orden captura respuestas rápidas y lentas ante cambios de carga. El robot mide continuamente corriente y voltaje y ajusta estas señales al modelo usando un método de mínimos cuadrados que incluye un “factor de olvido”: una herramienta matemática para dar más peso a los datos recientes y desvanecer el historial obsoleto cuando cambian las condiciones.
Permitir que el algoritmo aprenda y se adapte en tiempo real
Sobre este modelo, el equipo aplica un filtro de Kalman extendido, una herramienta ampliamente usada para seguir estados ocultos en datos ruidosos. Aquí, el estado oculto es el verdadero estado de carga de la batería. A medida que el robot opera, el filtro predice cómo debe cambiar la carga según el modelo y la corriente medida, y luego corrige esa predicción usando el voltaje medido. El módulo de mínimos cuadrados con factor de olvido sigue actualizando parámetros clave del modelo en línea, de modo que el filtro nunca dependa de una descripción de la batería obsoleta calibrada en fábrica. De forma inteligente, los investigadores también explotan una relación entre la resistencia interna y una magnitud llamada capacitancia de polarización: al aumentar la temperatura, la resistencia disminuye y la capacitancia crece. Al vigilar ambas propiedades a la vez, el sistema puede inferir efectos de temperatura sin necesidad de un sensor físico de temperatura y ajustar el modelo en consecuencia.
Enseñar a los robots cuándo y cómo recargar
Las estimaciones precisas de carga son solo la mitad de la historia; la otra mitad es cómo el robot las usa. Los autores diseñan una estrategia de carga autónoma que evita tanto la recarga constante en pequeños intervalos como las descargas profundas. Definen límites superior e inferior de carga: si la batería cae por debajo de un umbral, el robot prioriza volver a una base de carga; si ya está cerca del límite superior, pospone la carga y sigue trabajando. Dentro del rango seguro, el robot se recarga en momentos de inactividad. El sistema también vigila cada celda del pack y equilibra sus cargas para que ninguna celda se sobrecargue mientras otras se quedan atrás, un paso clave para prevenir un envejecimiento prematuro. Para hacer eficiente el atraque, el robot combina navegación a nivel de habitación con guiado infrarrojo de corto alcance, acortando recorridos y tiempo de acoplamiento.
Energía para robots más duradera y fiable
En pruebas usando conjuntos de datos públicos de baterías, simulaciones y robots reales, el nuevo método estimó el estado de carga con cerca del 98% de precisión, superando claramente a varias alternativas avanzadas basadas en filtros de partículas, redes neuronales y Transformers. Las baterías gestionadas con este enfoque mantuvieron mejor su carga tras semanas de uso simulado y soportaron entre un 15% y un 40% más de ciclos de carga-descarga que con métodos competidores. La resistencia interna creció más lentamente, un indicador de celdas más saludables, y los robots pasaron menos tiempo atracados manteniendo una mejor salud de batería. Para un público general, la conclusión es que esta técnica permite a los robots cuidar mejor sus propias baterías: pueden estimar su energía con mayor precisión, elegir momentos más inteligentes para recargarse y prolongar discretamente la vida útil de costosos packs de baterías sin sensores adicionales ni alto consumo de cálculo.
Cita: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Palabras clave: robots móviles, estado de carga de la batería, carga autónoma, filtro de Kalman extendido, baterías de fosfato de hierro y litio