Clear Sky Science · es
YOLO-DC para la detección de vehículos usando redes convolucionales deformables y atención coordenada entre canales
Por qué es crucial detectar vehículos con cámaras
Las ciudades modernas dependen de cámaras que vigilan las vías transitadas, ayudan a gestionar atascos y allanan el camino para los vehículos autónomos. Pero identificar de forma fiable cada vehículo en esas imágenes es sorprendentemente difícil, sobre todo cuando los coches aparecen muy pequeños a lo lejos, parcialmente ocultos en la congestión o difuminados por lluvia, niebla u oscuridad. Este artículo presenta YOLO‑DC, un nuevo sistema de visión por ordenador que pretende detectar coches, autobuses y otros vehículos de forma rápida y precisa, incluso en condiciones reales complejas y en dispositivos con recursos de cálculo limitados.
El problema de tráfico que motiva la investigación
Las ciudades en crecimiento afrontan carreteras colapsadas, más accidentes y emisiones en aumento. Los sistemas de transporte inteligente prometen aliviar estos problemas monitorizando el tráfico en tiempo real y orientando tanto a conductores humanos como autónomos. El ingrediente clave es la detección rápida y fiable de vehículos en vídeo. Los algoritmos «de dos fases» anteriores analizan las imágenes en varios pasos y pueden ser muy precisos, pero a menudo son demasiado lentos para su uso en tiempo real en cámaras de carretera o en vehículos. Los sistemas «de una sola fase» más recientes, como la familia YOLO ("You Only Look Once"), renuncian a algo de complejidad a cambio de una gran mejora en velocidad, lo que los hace populares en la práctica. Sin embargo, siguen teniendo dificultades con vehículos pequeños, solapados y con el clima adverso que oculta detalles. YOLO‑DC parte del modelo YOLOv8 más reciente y rediseña sus capas internas para afrontar mejor estos desafíos.
Cómo YOLO‑DC ve más con un enfoque más inteligente
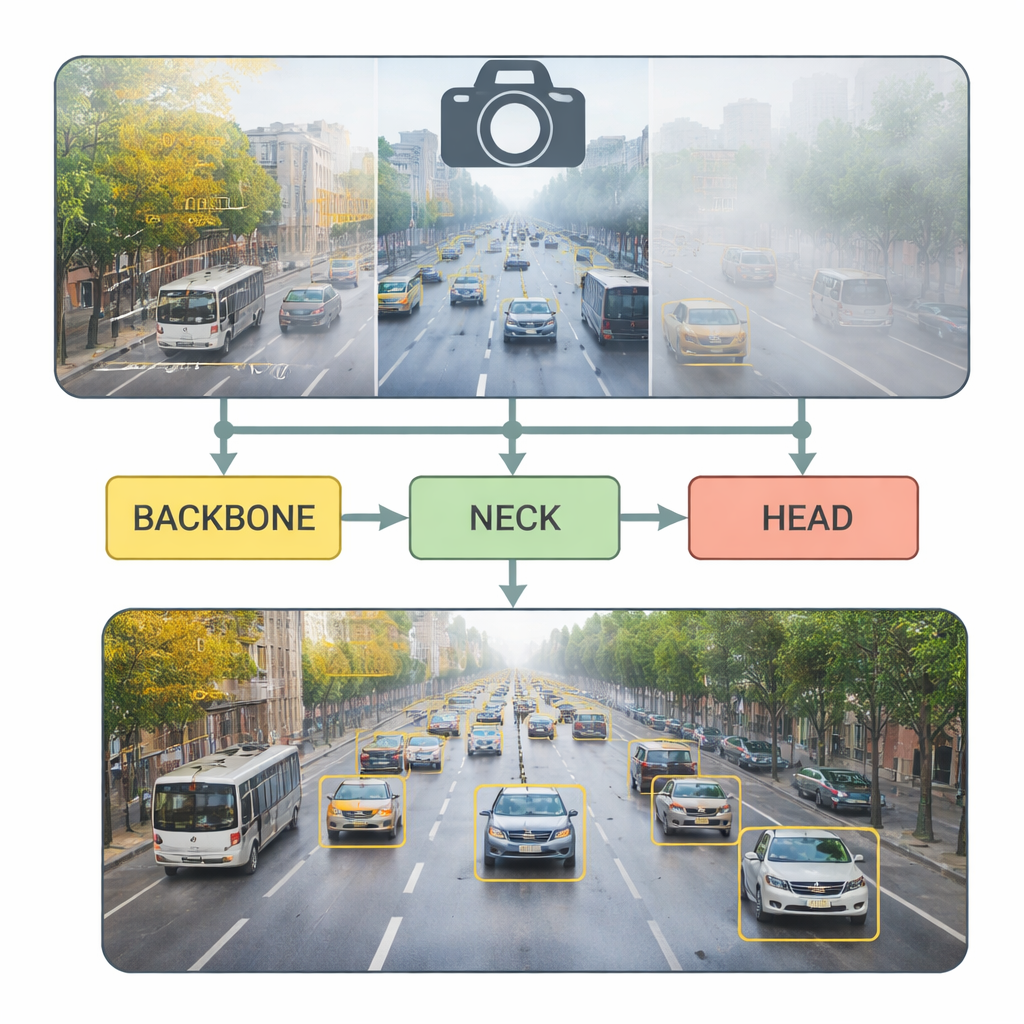
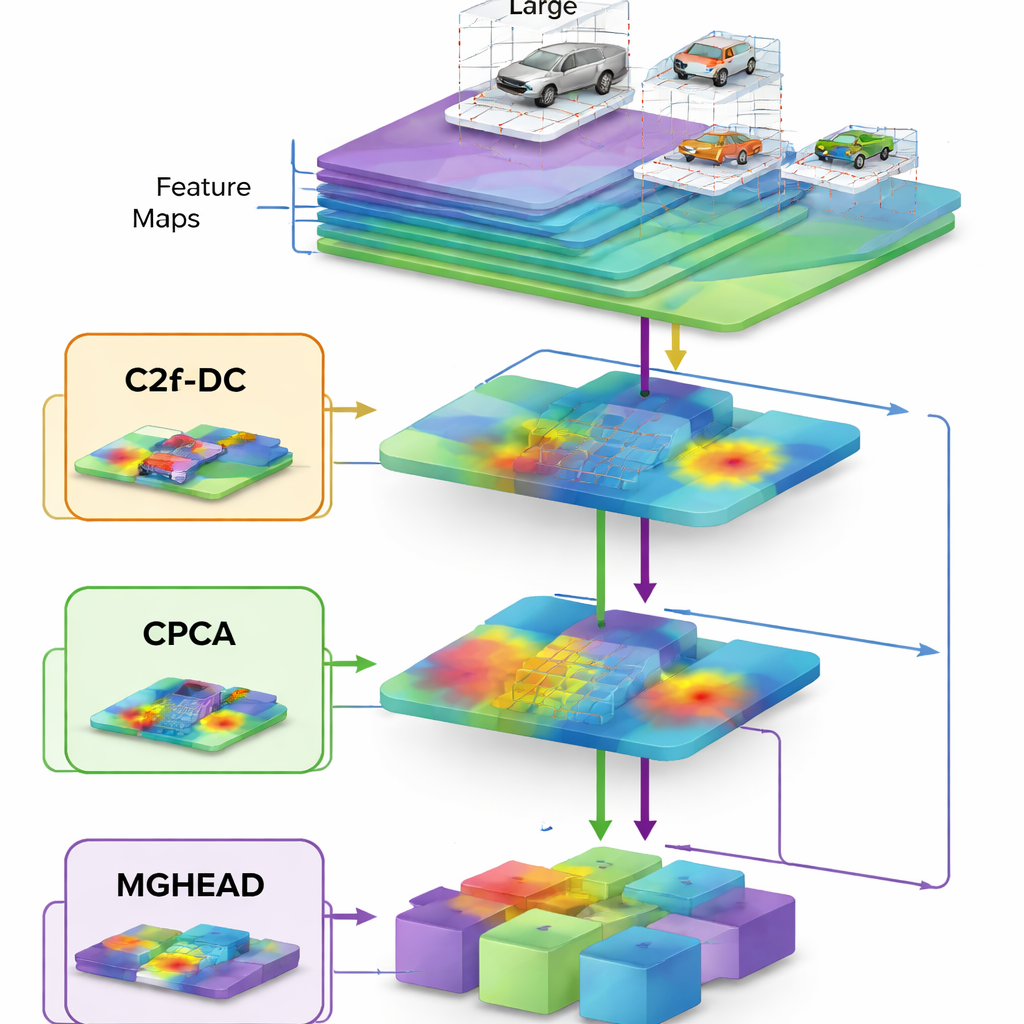
En el núcleo de YOLO‑DC hay una columna vertebral («backbone») renovada, la parte que primero transforma las imágenes crudas en características abstractas. Los autores introducen un mecanismo llamado atención coordenada entre canales, que enseña a la red no solo dónde mirar en la imagen sino también qué tipos de patrones visuales merecen más peso. Combinado con las denominadas convoluciones deformables —filtros que pueden doblar su patrón de muestreo para seguir vehículos inclinados o de forma irregular—, esta columna vertebral se adapta mejor a coches vistos desde distintos ángulos, escalas y posiciones. En lugar de tratar por igual cada parche de carretera, el sistema aprende a enfatizar los contornos y texturas reveladores que distinguen vehículos reales de edificios, árboles o marcas viales.
Capturar vehículos pequeños y lejanos sin perder velocidad
La parte intermedia del modelo, conocida como el cuello («neck»), se encarga de fusionar información de vistas generales y ampliadas con detalles finos y cercanos. YOLO‑DC mejora esta etapa de dos maneras. Primero, un módulo de atención de priorización por canal ayuda a la red a suprimir el ruido y resaltar señales sutiles de vehículos diminutos y lejanos en la escena. Segundo, un bloque rediseñado inspirado en la arquitectura ligera FasterNet reduce el número de operaciones aplicando convoluciones completas solo a una porción de los datos y mezclándolos de forma eficiente. Este rediseño cuidadoso disminuye tanto el número de parámetros como el tráfico de memoria, permitiendo que el modelo funcione más rápido y mejore la precisión: una combinación poco común pero muy deseable para dispositivos de borde como cámaras de tráfico y ordenadores a bordo.
Detectar vehículos de muchos tamaños y en mal tiempo
La etapa final, o cabeza («head»), decide dónde están los objetos y qué son. YOLO‑DC introduce convoluciones agrupadas multiescala en este punto, dividiendo los mapas de características en varios grupos de canales que usan distintos tamaños de filtro antes de recombinarse. Esto proporciona al detector una sensación de escala más rica, de modo que puede reconocer autobuses enormes que llenan el encuadre, camiones de tamaño medio y coches pequeños apenas visibles a la distancia, todo a la vez. En pruebas extensas en el conjunto de datos UA‑DETRAC, que contiene escenas viales en condiciones nubladas, soleadas, lluviosas y nocturnas, YOLO‑DC igualó o superó la precisión de detectores de primer nivel mientras utilizaba solo una fracción de su cómputo y procesaba cientos de fotogramas por segundo en hardware moderno. En el conjunto DAWN, diseñado específicamente para niebla, lluvia, nieve y tormentas de arena, el nuevo modelo obtuvo mejoras especialmente grandes en lluvia intensa y niebla densa, donde los sistemas tradicionales a menudo fallan.
Qué significan los resultados para las carreteras de cada día
Para el público general, el mensaje principal es que YOLO‑DC detecta mejor el tráfico tal como es en la realidad: concurrido, desordenado y a menudo oculto por mal tiempo o iluminación deficiente. Al combinar filtros flexibles que siguen las formas de los vehículos con mecanismos de atención que se centran en las regiones más informativas, el sistema detecta más vehículos, reduce las omisiones y funciona lo suficientemente rápido para el análisis de vídeo en vivo en hardware modesto. Esto lo convierte en un bloque de construcción prometedor para una gestión del tráfico más inteligente, una monitorización de accidentes más fiable y una conducción autónoma más segura, todo ello manteniendo los costes de procesamiento lo bastante bajos como para desplegarse ampliamente en calles de la ciudad y en futuros vehículos.
Cita: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
Palabras clave: detección de vehículos, transporte inteligente, YOLO, clima adverso, visión en tiempo real