Clear Sky Science · es
Cadena dinámica para la programación de sistemas multi-AGV con perfilado de movimiento sensible a la carga
Por qué los robots de almacén necesitan mejor sincronización
Las compras en línea han llenado los almacenes de mercancías que deben moverse de forma rápida, segura y las 24 horas. Muchas instalaciones se apoyan hoy en flotas de robots de suelo —Vehículos Guiados Automatizados, o AGV— para trasladar estanterías y palés. Pero si estos robots se programan con suposiciones demasiado simplificadas sobre su movimiento, pueden perder tiempo, sacudir paquetes frágiles o incluso correr riesgo de colisiones. Este artículo presenta una nueva forma de planificar y coordinar muchos AGV a la vez teniendo en cuenta su comportamiento físico real, lo que promete un tráfico más fluido y una carga más segura en almacenes concurridos.
Robots que mueven mercancías, no solo números
Los AGV modernos ya cruzan almacenes, aeropuertos y fábricas, remolcando carros o elevando estanterías y palés. La mayor parte del software existente para gestionar estas flotas funciona a un nivel alto: decide qué robot debe encargarse de cada tarea y, de forma aproximada, qué ruta debe seguir. Para simplificar los cálculos, normalmente asume que el tiempo de viaje entre dos puntos es fijo, ignorando qué tan rápido puede acelerar o frenar un robot o cuánto pesa su carga. Los autores muestran que este atajo crea problemas en edificios reales. Los robots pueden llegar a intersecciones antes o después de lo previsto, aumentando la probabilidad de embotellamientos, casi-colisiones o frenazos repentinos que sacuden lo que transportan.
Incorporar la física real al horario
Los investigadores abordan esta brecha con un enfoque en dos etapas que combina física y programación. Primero, diseñan un estimador de tiempo de viaje dinámico para AGV, llamado DTT-AGV. En lugar de tratar un pasillo como un único bloque de tiempo, DTT-AGV divide cada desplazamiento en fases: aceleración, crucero a velocidad constante y deceleración. Usa un modelo mecánico simple de un AGV que transporta una estantería, donde la estantería se comporta como una masa unida por resortes y amortiguadores. Este modelo captura cómo la aceleración y la deceleración pueden hacer que las cargas se balanceen o vibren. A partir de ello, el algoritmo calcula qué tan rápido puede moverse el vehículo de forma segura para una distancia y carga dadas sin exceder límites de velocidad, fuerza o vibración, y devuelve un tiempo de viaje realista para cada tramo del recorrido.
Evitar que los robots se encuentren cara a cara
En segundo lugar, el equipo introduce un método de encadenamiento de tiempos de llegada, ATC-AGV, que coordina muchos robots en rutas compartidas. Una vez que DTT-AGV ha estimado cuánto tardará cada tramo, ATC-AGV asigna tiempos precisos de llegada y salida en cada nodo —intersecciones, giros o puntos de transferencia— a lo largo de la ruta de cada robot. Construye una "cadena" temporal en cada nodo compartido, garantizando una separación segura entre vehículos y teniendo en cuenta el estado actual de cada robot, como si está cargado, recargando o girando. Si un nuevo plan hiciera que dos AGV ocupen el mismo nodo con demasiado solapamiento temporal, ATC-AGV desplaza el horario de uno de los robots lo justo para restaurar el margen de seguridad. En efecto, convierte la cuadrícula del suelo del almacén en un mapa con conciencia temporal que ayuda a prevenir colisiones antes de que puedan surgir.
Probando movimientos más suaves y viajes más delicados
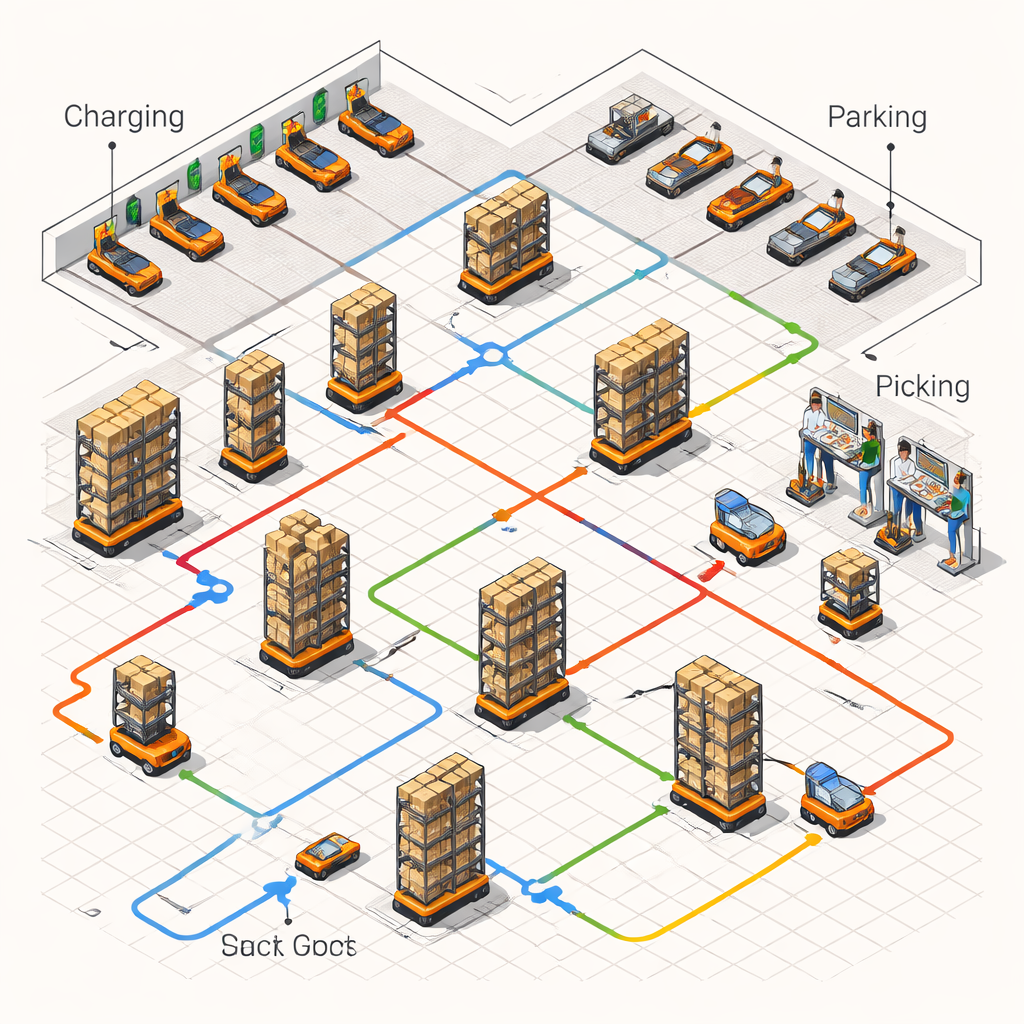
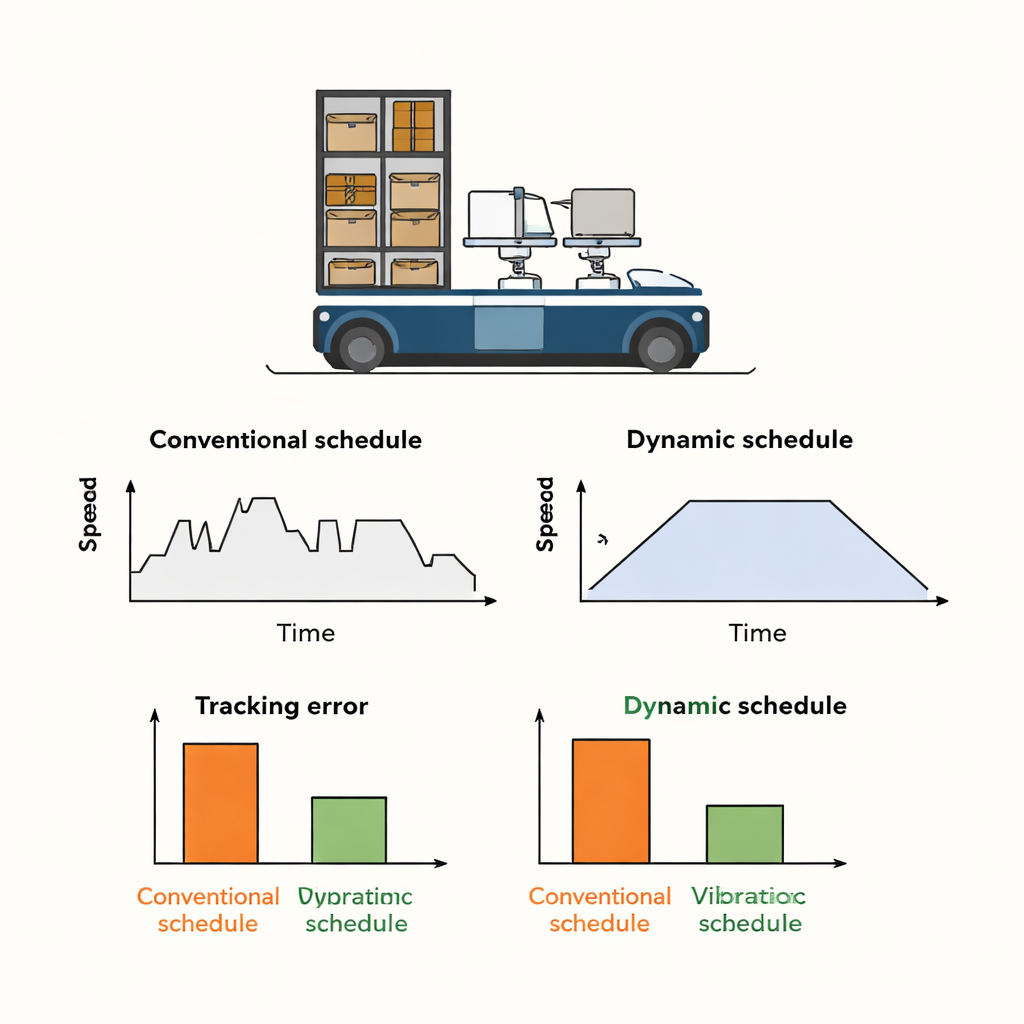
Para probar sus ideas, los autores simulan AGV en un almacén tipo cross-docking con cuadrícula que incluye áreas de carga, plazas de aparcamiento y zonas de estanterías. Comparan su planificador con un método convencional que asume velocidad prácticamente constante e ignora las fases detalladas del movimiento. En una prueba, un robot recorre una trayectoria en forma de L y luego gira 90 grados. El enfoque tradicional genera cambios bruscos de velocidad en la esquina, que el robot real no puede seguir a la perfección. El resultado son grandes errores de seguimiento —diferencias entre dónde debería estar el robot y dónde está realmente— y picos en el error temporal en puntos clave. Con el nuevo planificador, la ruta se divide en fases claras de aceleración, crucero y frenado. El robot simulado ahora sigue su trayectoria objetivo de cerca, con errores mucho menores y giros más suaves.
Más suave con los paquetes y preparado para el futuro
El segundo conjunto de pruebas se centra en cómo se comporta la propia carga. Cuando se usa el horario convencional, la base del robot experimenta sacudidas bruscas en la aceleración que excitan el comportamiento elástico de la estantería, provocando fuertes vibraciones en la carga. Con el horario dinámico y sensible a la carga, las aceleraciones se mantienen dentro de una banda más estrecha y cambian con mayor suavidad. Medido a lo largo del tiempo, tanto las vibraciones máximas como las medias de la carga disminuyen considerablemente, lo cual es crítico para artículos frágiles, apilados o inestables. Los autores también investigan cómo factores relegados, como la fricción rueda-suelo, podrían afectar sus estimaciones y encuentran que, bajo condiciones típicas de almacén, el error temporal adicional se mantiene dentro de los márgenes de seguridad incorporados en su algoritmo.
Qué significa esto para los almacenes reales
En términos sencillos, este trabajo enseña a los planificadores de AGV a respetar el movimiento real de las máquinas que controlan. Al basar los tiempos de viaje y las decisiones de prioridad en la rapidez con la que los robots pueden realmente acelerar, frenar y transportar distintas cargas sin dañarlas, el marco propuesto reduce los errores de seguimiento de ruta, disminuye la vibración de la carga y reduce el riesgo de conflictos en las intersecciones. Para los operadores y fabricantes de almacenes, eso se traduce en un tráfico más fluido, un manejo de mercancías más seguro y una base que puede escalar a medida que las flotas crecen y los diseños se vuelven más complejos.
Cita: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Palabras clave: vehículos guiados automatizados, robótica de almacén, programación sin colisiones, planificación de movimiento, logística inteligente