Clear Sky Science · es
Posado de quadrotor mediante control continuo adaptativo de segundo orden en presencia de incertidumbres
Por qué es importante que los drones se adhieran a las paredes
Imagine un dron pequeño que no solo se mantiene en vuelo hasta que se agota la batería, sino que puede posarse silenciosamente en una pared como un pájaro y quedarse allí durante horas observando un puente, un cultivo o el borde de un bosque. Este artículo presenta una nueva forma de controlar esos drones “posadores” para que puedan volar hasta una superficie vertical, hacer contacto sin rebotar y permanecer allí de forma estable incluso cuando el aire es turbulento o el comportamiento del dron no se conoce perfectamente. El trabajo aborda el reto de convertir una máquina voladora frágil en una herramienta de inspección fiable y de bajo consumo.
De robots que flotan a exploradores que se adhieren a paredes
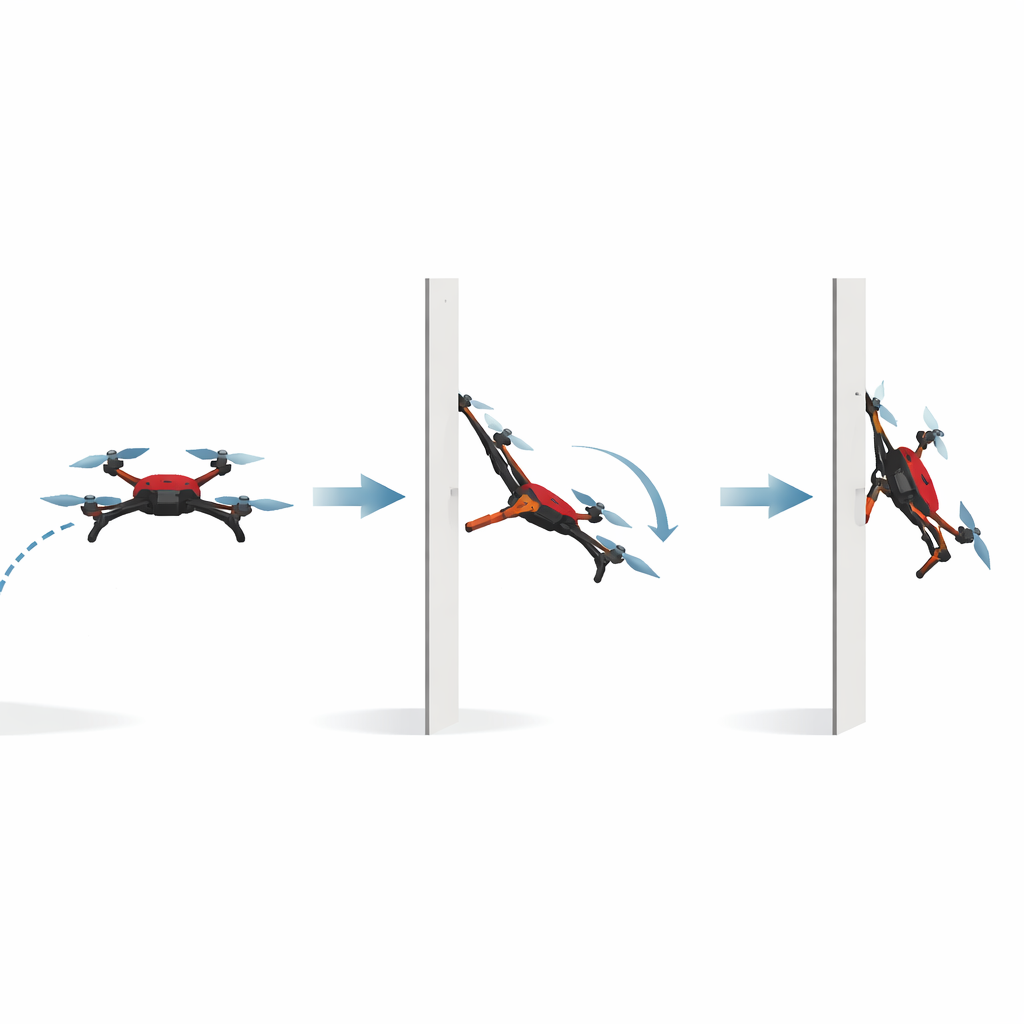
Los pequeños drones de cuatro rotores, o quadrotors, ya se usan para cartografía, inspección de construcciones, seguimiento de fauna y agricultura de precisión. Sin embargo, su mayor limitación es la autonomía: mantenerse en suspensión consume batería. Posarse en una superficie—como una pared, un poste o el intradós de un puente—permite al dron apagar la mayoría de sus motores mientras mantiene sus sensores en posición para observación a largo plazo. Hacerlo de forma segura está lejos de ser trivial. Durante la breve pero crítica maniobra de posado, el dron debe acercarse a la pared, tocarla y girar a una postura con el morro hacia abajo sin rebotar, deslizarse o perder el control cuando ráfagas inesperadas o errores de modelado perturban su movimiento.
El reto de un aterrizaje limpio en la pared
Los autores estudian un quadrotor equipado con un ligero brazo de apoyo en su parte frontal, que actúa como punto de contacto físico con la pared. Cuando el dron pasa del vuelo libre al contacto, su posición (lateral, hacia adelante, arriba‑abajo) y su actitud (ángulos de roll, pitch, yaw) están fuertemente acopladas: cambiar la orientación altera cómo el empuje se traduce en movimiento, y la reacción repentina de la pared puede torcer el cuerpo del dron. Además de esto, efectos del mundo real—como interacciones aerodinámicas cerca de la pared, pequeñas imprecisiones de fabricación y ruido de los sensores—actúan como perturbaciones desconocidas. Las técnicas de control robusto existentes pueden mantener la estabilidad, pero a menudo provocan “chattering” de alta frecuencia en las órdenes a los motores, desgastan el hardware y solo garantizan que los errores disminuyan de forma gradual en lugar de hacerlo dentro de una ventana de tiempo corta y predecible.
Una forma más inteligente de equilibrar y adaptarse
Para superar estos problemas, el artículo presenta un esquema de control continuo adaptativo de segundo orden (ASOCC). En términos sencillos, el controlador observa no solo cuánto se desvía el movimiento del dron respecto al objetivo, sino también con qué rapidez cambia ese error, y moldea sus órdenes para que ambos se sitúen en cero en tiempo finito. Un observador de perturbaciones incorporado actúa como un “oyente” de ruido en tiempo real, estimando el efecto neto de fuerzas desconocidas y desajustes del modelo, y alimentando esa información de vuelta a la ley de control. Crucialmente, las ganancias que determinan la intensidad de la reacción del controlador se ajustan sobre la marcha basándose en esas estimaciones, en lugar de fijarse de antemano. Dado que las señales de control cambian de forma suave en vez de conmutar bruscamente, el diseño reduce considerablemente el chattering mientras mantiene una fuerte robustez.
Poniedo a prueba el nuevo control
Los investigadores analizaron primero las matemáticas del par observador‑controlador y demostraron, usando funciones de Lyapunov de tipo energía, que todos los errores de movimiento convergen a cero en tiempo finito a pesar de perturbaciones acotadas. Luego simularon escenarios agresivos de posado en software, sometiendo el modelo del dron a fuerzas tipo viento, ruido aleatorio de medición y errores intencionales en sus parámetros físicos. En estas pruebas, ASOCC guió al dron a través de tres etapas—preparación, aproximación y posado—manteniendo los errores de posición y orientación reducidos y las entradas de control suaves. En comparación con varias alternativas avanzadas, incluidos controladores por modo deslizante y basados en modelos, el nuevo método redujo las principales medidas de error de seguimiento en aproximadamente un 35–55 por ciento.
De la simulación a un dron real en una pared
Más allá de las simulaciones, el equipo construyó un quadrotor posador en miniatura usando una placa de vuelo comercial y un chasis impreso en 3D con un brazo frontal. En experimentos en interiores, el dron voló de forma autónoma hacia una pared inclinada, ascendió hasta aproximadamente un metro y luego inclinó el morro hacia abajo para hacer contacto y permanecer adherido. Las series temporales muestran que la altitud, la posición horizontal y el ángulo de cabeceo siguen de cerca sus trayectorias deseadas, con solo pequeñas ondulaciones por ruido de los sensores. A pesar del hardware de bajo coste, retardos en la comunicación y límites de los actuadores, el dron no rebotó ni osciló tras el impacto, demostrando que ASOCC puede manejar las realidades desordenadas del vuelo.
Qué significa esto para futuros inspectores voladores
Para el público general, el resultado clave es sencillo: este trabajo ofrece una estrategia de control que permite a drones pequeños adherirse a superficies verticales y permanecer allí de forma fiable, incluso cuando las condiciones son imperfectas. Al combinar un control suave pero fuertemente correctivo con un observador de perturbaciones adaptativo, el método posibilita un posado rápido y preciso sin las vibraciones y el estrés sobre el hardware que se ven en muchos controladores robustos. Esto abre la puerta a la monitorización aérea de larga duración con baterías más ligeras, plataformas más simples y mayor seguridad—un paso importante hacia flotas de robots autónomos “pegados a la pared” que vigilen discretamente infraestructuras, cultivos y entornos naturales.
Cita: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Palabras clave: posado de quadrotor, control adaptativo, inspección con drones, observador de perturbaciones, robótica aérea