Clear Sky Science · es
Un modelo ligero basado en YOLO para la detección precisa de racimos de pimienta roja en la cosecha robótica
Robots más inteligentes para cosechas picantes
Los granos de pimienta de Sichuan, esas pequeñas cáscaras rojas que aportan el característico hormigueo picante a la cocina sichuanesa, son sorprendentemente difíciles de recolectar. Los frutos crecen en racimos densos y espinosos que se dañan con facilidad, y la recolección manual es lenta y estacional. Este estudio presenta un nuevo sistema de visión por ordenador, llamado Red-YOLO, diseñado para ayudar a robots móviles pequeños a localizar rápida y con precisión estos delicados racimos en huertos reales, incluso cuando los frutos se solapan o quedan ocultos detrás de las hojas.
Por qué la recolección de pimienta es tan complicada
A diferencia de frutas grandes y lisas como las manzanas, los granos de pimienta roja crecen como numerosas bayas diminutas agrupadas en ramas espinosas. Los racimos pueden verse muy distintos de un árbol a otro: algunos son compactos y apretados, otros son sueltos y dispersos, y todos se encuentran rodeados por fondos confusos de ramas, hojas y cambios de iluminación. Para un robot, ver dónde termina un racimo y comienza otro —y cuán apretado está cada uno— es esencial. La fuerza de agarre e incluso el tamaño de la herramienta de recolección deben ajustarse según el grado de compactación, o las frágiles bolsas de aceite de los pimientos pueden reventar, reduciendo la calidad y el valor.
Construyendo una biblioteca de imágenes del mundo real
Dado que no existían colecciones públicas de imágenes para este cultivo, los investigadores tuvieron que crear su propio conjunto de datos. A lo largo de dos temporadas de cultivo en el condado de Hanyuan, en Sichuan, fotografiaron árboles de pimienta en huertos reales con un teléfono inteligente de consumo, capturando 960 imágenes cuadradas de alta resolución bajo diferentes ángulos solares y horas del día. Cada imagen fue etiquetada cuidadosamente a mano, distinguiendo entre racimos compactos y dispersos. Para enseñar al ordenador a manejar la variabilidad, modificaron digitalmente muchas de las imágenes —ajustando brillo y contraste, volteándolas horizontalmente, distorsionando algunas rejillas y rotando vistas. Esto amplió el conjunto de entrenamiento a más de 4.300 imágenes, mientras que un pequeño conjunto de fotografías sin tocar se reservó para probar de forma honesta el rendimiento final del sistema.
Un modelo de visión por ordenador más delgado y más preciso
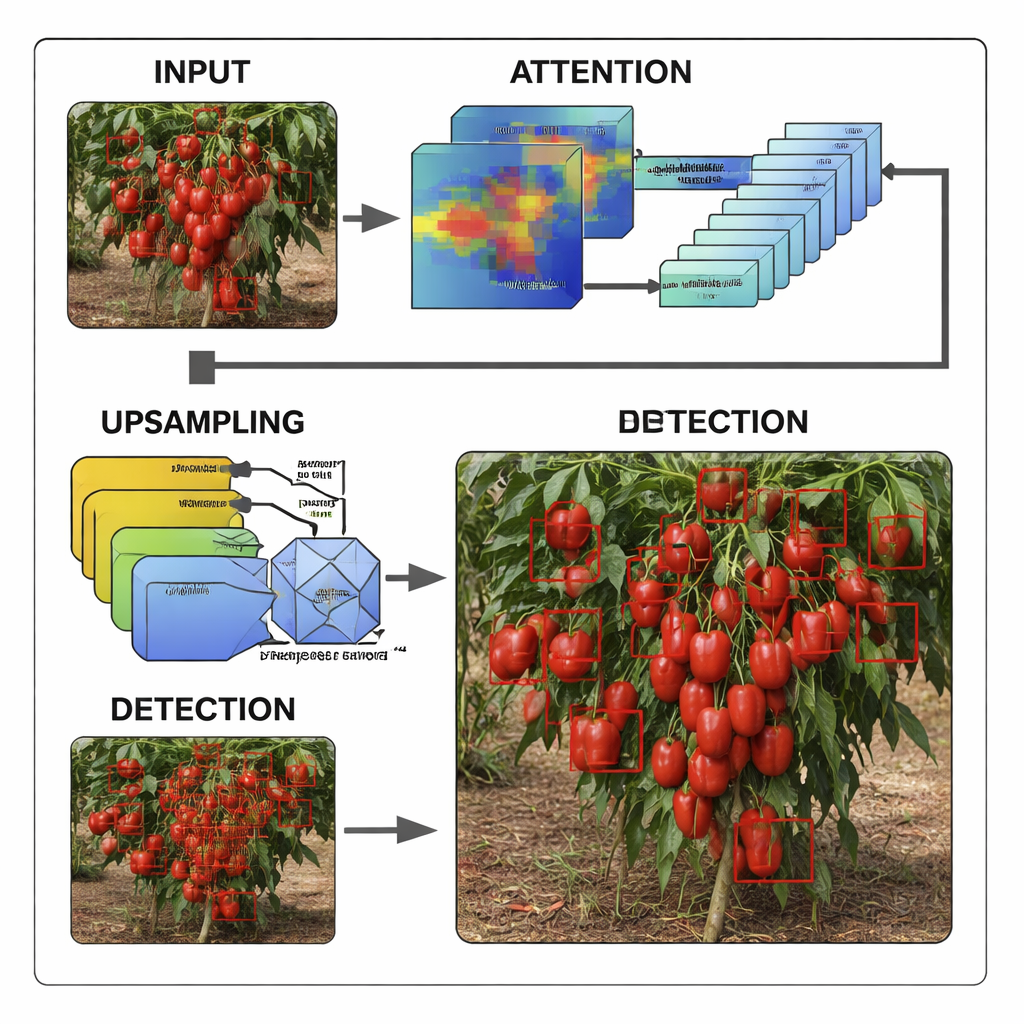
En el núcleo del sistema está YOLOv8, un modelo de detección de objetos “you only look once” ampliamente utilizado que encuentra objetos en una sola pasada rápida en lugar de en múltiples etapas más lentas. El equipo adaptó una versión muy pequeña de este modelo y la remodeló específicamente para los racimos de pimienta roja. Añadieron un módulo de atención que enseña a la red a centrarse en canales y regiones con mayor probabilidad de contener fruta mientras ignora distracciones como el cielo, las ramas y árboles lejanos. Rediseñaron partes de la red para que pueda reutilizar la información de forma más eficiente y reducir cálculos innecesarios. También reemplazaron un simple paso de cambio de tamaño por un bloque de sobremuestreo más inteligente que reconstruye detalles finos y los contornos alrededor de pimientos solapados, ayudando al modelo a distinguir dónde comienzan y terminan los racimos densos.
Visión rápida y precisa para robots pequeños
Para comprobar si estos cambios merecían la pena, los investigadores compararon Red-YOLO con sistemas de detección más antiguos y pesados y con una gama de variantes modernas ligeras de YOLO. Los modelos tradicionales en varias etapas, aunque potentes, eran sencillamente demasiado lentos y exigentes en recursos para robots compactos de huerto. Varias versiones más nuevas de YOLO funcionaron mejor, pero tuvieron dificultades con racimos pequeños, parcialmente ocultos o fondos complejos, con frecuencia perdiendo frutos o confundiendo hojas con pimientos. Red-YOLO encontró un mejor equilibrio: detectó racimos de pimienta con mayor precisión y sensibilidad que todos los modelos de comparación, manteniendo el tamaño del modelo por debajo de tres millones de parámetros y la carga computacional lo bastante baja para procesadores embebidos. Las pruebas en escenas variadas de huerto mostraron que Red-YOLO encontraba consistentemente racimos incluso cuando los frutos eran diminutos, estaban sombreados o se solapaban mucho.
Del modelo de laboratorio al ayudante del huerto
Para los no especialistas, el resultado clave es práctico: este trabajo demuestra que un sistema de visión compacto y cuidadosamente ajustado puede proporcionar a pequeños robots de recolección un “ojo” fiable en el campo. Con Red-YOLO, un robot puede seleccionar automáticamente si está manejando un racimo compacto o disperso y ajustar el tamaño y la fuerza de su pinza antes de recoger, reduciendo daños y ahorrando mano de obra. Aunque el estudio actual se centra en una variedad de pimiento en una sola región, el mismo enfoque —construir conjuntos de datos específicos y refinar modelos de detección ligeros— podría extenderse a otros cultivos especializados. A medida que estos sistemas de visión se vuelvan más robustos y se desplieguen ampliamente, podrían ayudar a que la cosecha sea más rápida, segura y consistente, garantizando un suministro estable de las pimientas que impulsan algunos de los sabores favoritos del mundo.
Cita: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Palabras clave: cosecha robótica, detección de pimientos, visión por ordenador, YOLO ligero, agricultura inteligente