Clear Sky Science · es
Desarrollo de un robot inteligente de atención al paciente con navegación autónoma mejorada mediante optimización de trayectoria en plantas hospitalarias
Robots que ayudan a las enfermeras, no las reemplazan
Los hospitales de todo el mundo están bajo presión: más pacientes mayores, más enfermedades crónicas y personal al límite. Este estudio describe un robot inteligente de atención al paciente diseñado no para sustituir la enfermería, sino para encargarse discretamente de las tareas repetitivas de monitorización y las rondas nocturnas en las plantas hospitalarias. Al desplazarse de forma segura y fiable por su cuenta, este robot podría ayudar a las enfermeras a detectar emergencias antes—como caídas o fiebre súbita—mientras alivia su carga de trabajo y reduce el riesgo de accidentes en pasillos concurridos y marcos de puerta estrechos.
Por qué los pasillos hospitalarios son difíciles para los robots
A primera vista, un pasillo hospitalario parece sencillo: líneas rectas, suelos limpios, puertas regulares. Para un robot, nada más lejos de la realidad. Camas, carros, paredes y, sobre todo, marcos de puerta estrechos crean espacios angostos donde incluso un pequeño error puede causar una colisión. Muchos robots hospitalarios actuales dependen de un conjunto de sensores y hardware complejo para afrontar esto. El equipo detrás de este estudio siguió una vía distinta: se propusieron crear un robot que pudiera moverse con seguridad usando solo un sensor principal—un escáner láser bidimensional que mide distancias a su alrededor—y una forma más inteligente de planificar rutas.

Construyendo un par de ojos extra para la enfermería
Los investigadores desarrollaron un robot inteligente de atención al paciente (SPCR) sobre la base de una plataforma comercial con ruedas. En su estructura montaron una cámara 3D para detectar caídas y leer signos vitales sin tocar al paciente, y un sensor láser 2D en la parte superior para escanear continuamente el entorno en 360 grados. En el interior del robot hay un ordenador embebido, baterías, controladores de motor y electrónica de comunicación que le permiten conectarse con una aplicación de control y gestionar sus propias decisiones de conducción. El robot puede moverse en todas las direcciones, articular un brazo con la cámara para mirar a los pacientes y está diseñado para funcionar varias horas seguidas en condiciones reales de hospital.
Un mapa más inteligente en lugar de más hardware
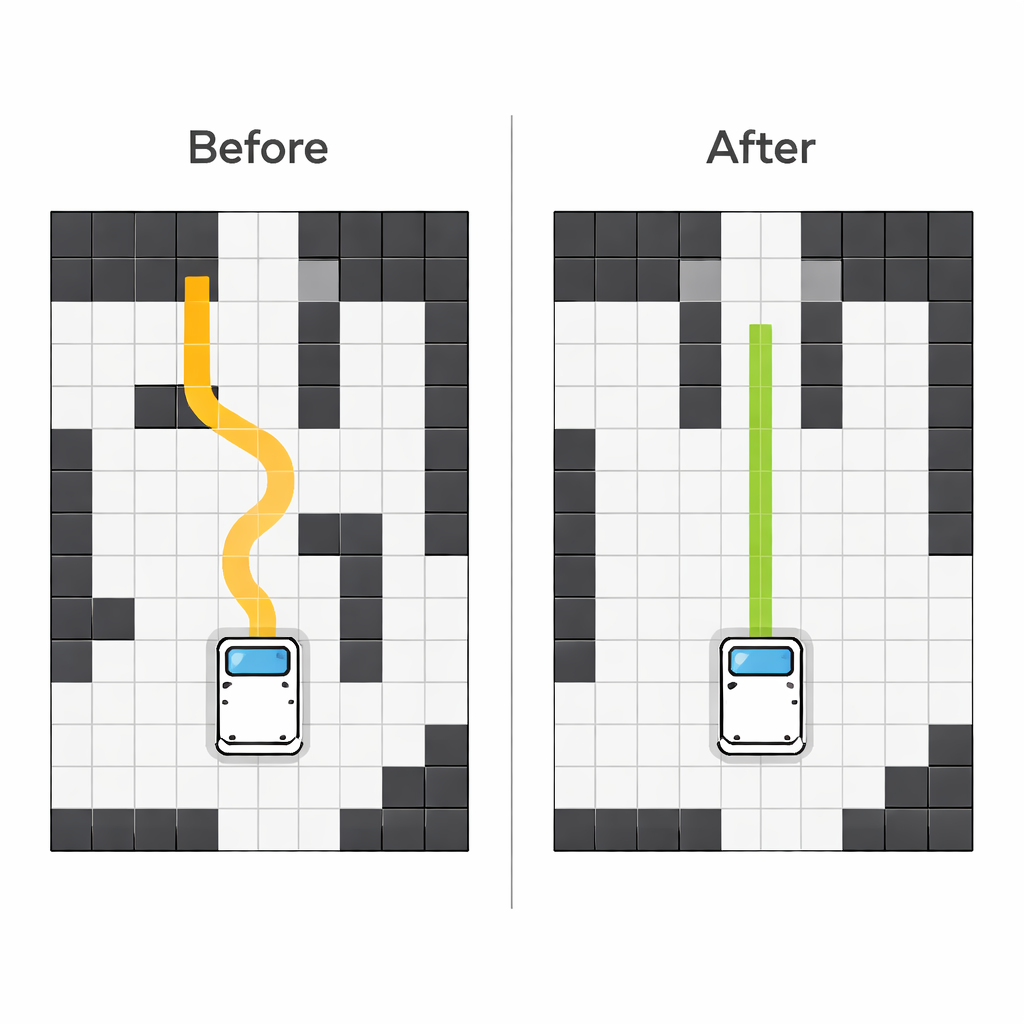
Para navegar, el robot necesita primero un mapa que señale dónde puede y dónde no puede ir. El equipo partió de planos precisos de un pasillo hospitalario y los convirtió en un mapa en cuadrícula, donde cada pequeña casilla se etiqueta como espacio libre, pared u obstáculo. En lugar de dejar el mapa tal cual, lo modificaron para que fuera más cauteloso que la realidad. Introdujeron «espacios de obstáculos virtuales», áreas adicionales bloqueadas que alejan suavemente al robot de puntos de riesgo, como los bordes de las puertas y las esquinas estrechas. El software de planificación de rutas, basado en una versión mejorada del algoritmo D* Lite, busca entonces en este mapa más seguro rutas que eviten giros bruscos y mantengan al robot más cerca del centro en pasajes estrechos.
Poniendo el robot a prueba en plantas reales
El sistema se probó en un pasillo de hospital real dividido en tres secciones con combinaciones distintas de corredores, puertas y obstáculos. El robot tuvo que desplazarse entre puntos de control, pasar por puertas estándar de 90 centímetros de ancho y evitar paredes y objetos fijos. Dado que el propio robot mide alrededor de 76 centímetros de ancho, apenas tenía unos centímetros de holgura a cada lado al atravesar las puertas—condiciones en las que muchos robots tienen dificultades. Al comparar el rendimiento antes y después de ajustar el mapa en cuadrícula, los investigadores comprobaron que la tasa de éxito del robot para completar sus trayectos sin tocar nada aumentó en más de un 30 por ciento en todas las secciones, con trayectorias más suaves y menos maniobras innecesarias.
Qué significa esto para la atención futura al paciente
Para el público general, el mensaje clave es simple: en lugar de cargar a los robots con más y más sensores, este estudio demuestra que un diseño digital cuidadoso del mapa y una planificación de rutas más inteligente pueden hacer que los robots hospitalarios sean más seguros y prácticos. Un robot que pueda pasar con fiabilidad por puertas estrechas durante la noche, seguir rutas eficientes y comprobar discretamente signos básicos de los pacientes podría liberar a las enfermeras para que se concentren en la atención humana—consolar a las familias, tomar decisiones complejas y atender emergencias. Los autores consideran este trabajo como una base: las versiones futuras incorporarán más sensores y funciones de monitorización de pacientes más completas, con el objetivo de asistentes robóticos fiables que operen las 24 horas y se desplacen con seguridad en entornos hospitalarios reales.
Cita: Kim, B., Hyun, J., Yang, B. et al. Development of smart patient care robot with enhanced autonomous navigation through path optimization in hospital wards. Sci Rep 16, 6026 (2026). https://doi.org/10.1038/s41598-026-36664-2
Palabras clave: robots hospitalarios, navegación autónoma, monitoreo de pacientes, mapeo LiDAR, planificación de rutas