En el lecho marino, los vehículos submarinos autónomos actúan como nuestros ojos y oídos para la investigación climática, la inspección de infraestructuras y las operaciones de búsqueda y rescate. Sin embargo, estos submarinos robóticos afrontan un problema básico: comunicarse y razonar con claridad en un entorno hostil donde las señales son lentas, ruidosas y la energía escasa. Este artículo presenta una nueva manera de ayudar a los robots submarinos a comunicarse, detectar objetos y mantenerse seguros combinando realidad aumentada y virtual con una rama de la inteligencia artificial llamada aprendizaje por refuerzo.
Por qué la comunicación submarina es tan difícil
Enviar datos bajo el agua es mucho más duro que hacerlo por el aire. Las ondas de radio, que alimentan el Wi‑Fi y el 5G, son rápidamente absorbidas por el agua de mar. Las señales acústicas (basadas en sonido) viajan más lejos pero ofrecen tasas de datos muy bajas y pueden sufrir retrasos, ecos o distorsión. La inducción magnética solo funciona a decenas de metros. Los sistemas de control existentes para robots submarinos suelen tratar estos canales por separado y emplean reglas fijas para navegación y sensado. Eso los hace lentos para adaptarse cuando cambian las condiciones, malgastan batería y dejan los enlaces de comunicación vulnerables a escuchas o ataques.
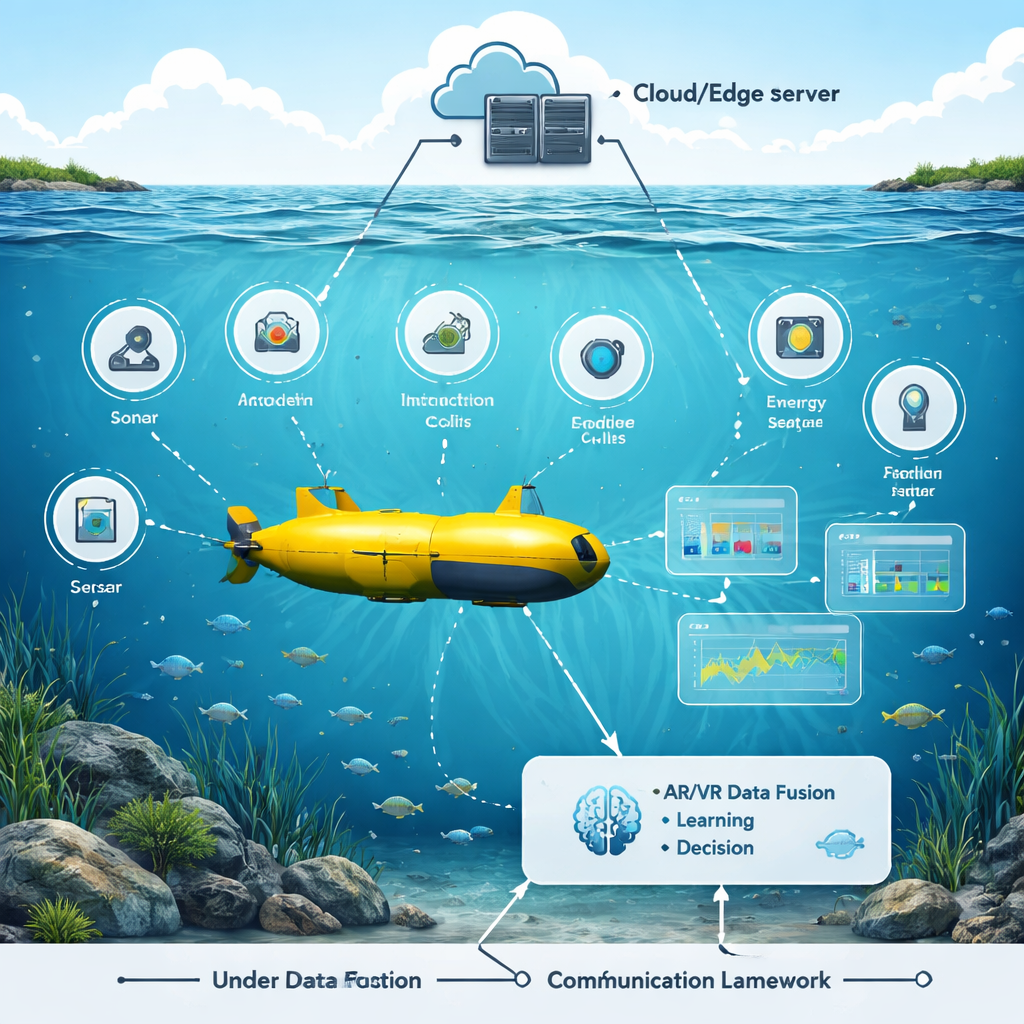
Un océano virtual para entrenar mejores instintos Figure 1.
Los autores construyeron un banco de pruebas de realidad aumentada y virtual que recrea un mundo submarino concurrido: peces en movimiento, rocas, barcos y boyas, junto con ruido realista y pérdida de señal en el agua. Un vehículo submarino simulado navega por este entorno usando muchos sensores—sonar, cámaras, módems acústicos, medidores de energía y rastreadores de posición. En la escena virtual, los investigadores pueden deslizar controles para cambiar la posición de objetos, las condiciones del agua y los ajustes de los sensores, y ver de inmediato cómo responde el robot. Esta capa AR/VR no es solo ornamentación; fusiona las señales crudas de los sensores en una imagen 3D unificada que resulta más fácil de interpretar y sobre la que puede actuar un sistema de IA.
Enseñar al robot a aprender por experiencia
En el núcleo del marco hay una estrategia de IA que los autores denominan Estrategia de Programación Adaptativa de Realidad Aumentada y Aprendizaje por Refuerzo (AARLSS). En lugar de seguir un guion fijo, el robot aprende por prueba y error en el océano virtual. En cada instante observa su estado sensorial fusionado, elige una acción (como cambiar de rumbo, ajustar la tasa de muestreo de los sensores o alternar entre comunicaciones de corto y largo alcance) y recibe una recompensa. Esa recompensa equilibra cuatro objetivos: ahorrar energía, reducir la latencia, disminuir el riesgo de seguridad y usar menos recursos computacionales y de red. Una red profunda de Q‑learning almacena y actualiza el valor esperado de distintas decisiones, usando mini-lotes de experiencias pasadas guardadas en una memoria de reproducción para que el robot aprenda tanto de situaciones recientes como de las antiguas.
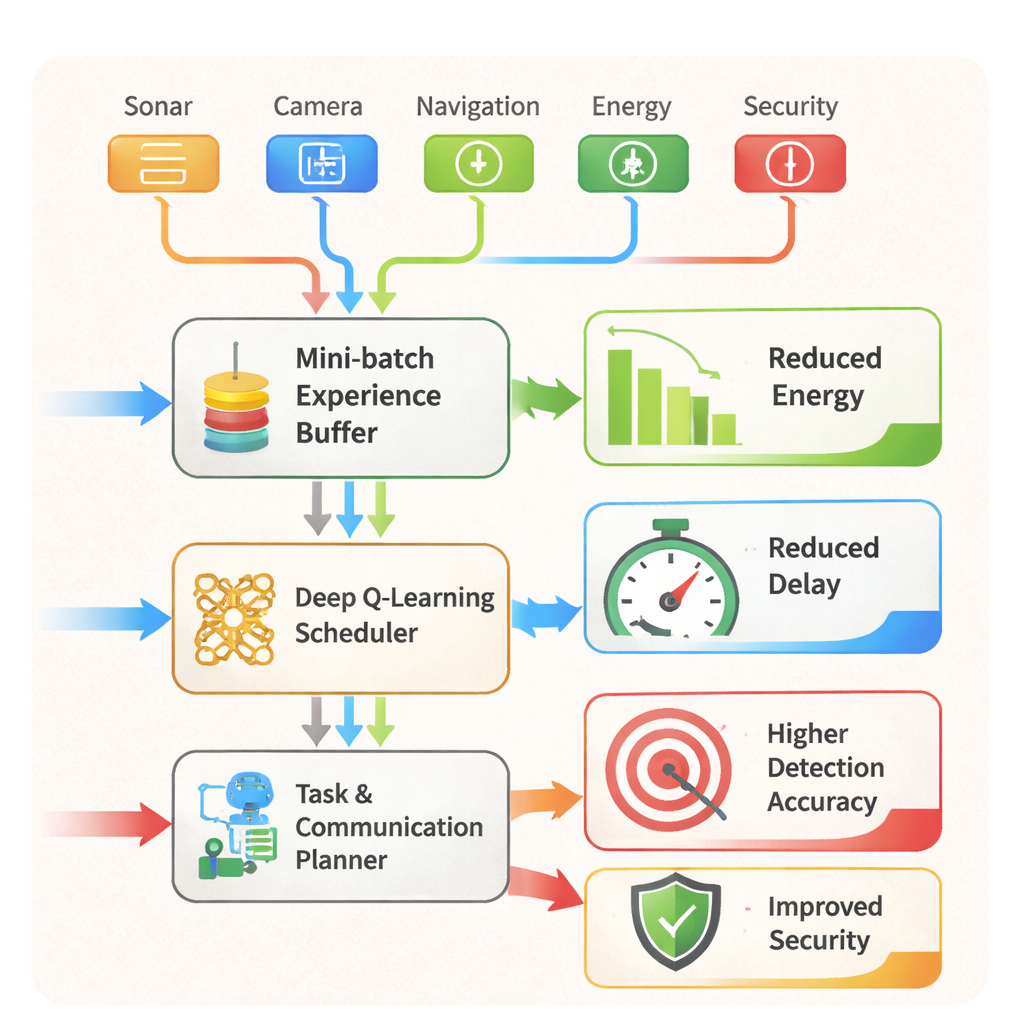
De la programación inteligente a misiones más seguras Figure 2.
AARLSS también actúa como programador en tiempo real. Decide qué tareas—navegación, detección de objetos, comunicación o comprobaciones de seguridad—deben ejecutarse dónde y cuándo, y si los datos deben procesarse en el robot, descargarse a un servidor de borde o retrasarse. Además, un sistema integrado de detección de intrusiones escanea continuamente los patrones en los datos de sensores y de red para señalar anomalías que podrían indicar un ataque o malfuncionamiento, y puede desencadenar acciones protectoras como bloquear enlaces riesgosos o forzar cómputo local exclusivo. En pruebas dentro del simulador AR/VR, el marco superó a varios métodos establecidos de aprendizaje por refuerzo. Redujo el consumo energético del vehículo submarino en aproximadamente un 20%, disminuyó las demoras en comunicación y tareas en torno al 18–20% y elevó la precisión en la detección de objetos hasta aproximadamente un 97–98%, incluso durante maniobras complejas y en escenas saturadas.
Qué significa esto para los océanos del mundo real
Para el público general, el mensaje clave es que esta investigación apunta a robots submarinos más independientes, eficientes y fiables. Al entrenar en un océano virtual rico y aprender a equilibrar energía, tiempo, exactitud y seguridad a la vez, AARLSS permite que un vehículo elija cuándo hablar, cuándo escuchar y cuándo permanecer en silencio para ahorrar energía—todo mientras mantiene una vigilancia aguda sobre su entorno y protege sus datos. Aunque estos resultados provienen de un simulador sofisticado y no del agua abierta, sugieren que futuras flotas de robots submarinos podrían afrontar misiones más largas, seguras y con más datos con menor supervisión humana, mejorando desde la ciencia marina hasta las inspecciones de la industria offshore.
Cita: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3