Clear Sky Science · es
Control predictivo basado en aprendizaje por refuerzo para optimizar motor síncrono de imanes permanentes contra-rotante en sistemas de propulsión de submarinos
Motores más inteligentes para submarinos más sigilosos
Los submarinos modernos dependen de una propulsión silenciosa y eficiente para explorar los océanos y cumplir misiones científicas, comerciales o de defensa. Este estudio examina un tipo especial de motor eléctrico que hace girar dos hélices en direcciones opuestas, ayudando a que un submarino se desplace de forma suave y silenciosa por el agua. Los investigadores muestran cómo combinar herramientas avanzadas de predicción con un algoritmo de aprendizaje puede mantener estos motores estables y eficientes, incluso cuando olas, corrientes y maniobras bruscas los perturban.
Dos hélices, un submarino estable
Los sistemas tradicionales de una sola hélice pueden provocar que un submarino gire o se balancee, especialmente a altas velocidades, lo que dificulta el control y aumenta la detectabilidad. Para evitarlo, los ingenieros usan sistemas de hélices contra-rotantes: dos hélices montadas en el mismo eje pero girando en sentidos opuestos. En el corazón de esta configuración está el motor síncrono de imanes permanentes contra-rotante (CRPMSM), que es esencialmente dos motores eléctricos compactos y de alto par apilados. Este arreglo cancela fuerzas de torsión indeseadas, mejora el uso de la energía y reduce el ruido, todo lo cual es vital para el sigilo y las misiones largas bajo las olas. Sin embargo, cuando la carga en los dos rotores se desequilibra, como en aguas turbulentas o en giros cerrados, mantener ambos lados girando en perfecta armonía se convierte en un serio desafío de control. 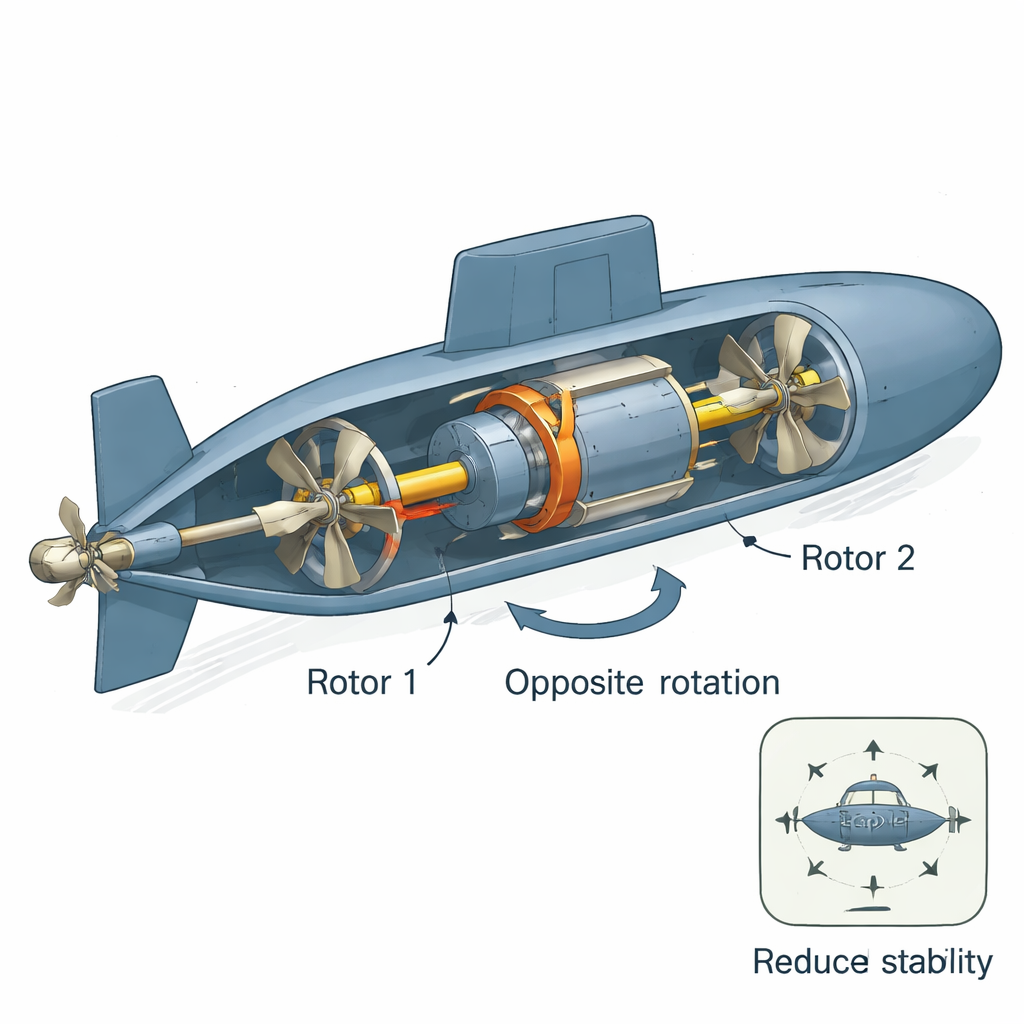
Por qué el control convencional se queda corto
Los ingenieros han probado muchas estrategias de control para mantener sincronizados y eficientes los rotores del CRPMSM. Métodos como el control orientado al flujo y el control directo de par pueden funcionar bien en condiciones calmadas y predecibles, pero flaquean cuando el entorno subacuático cambia rápidamente o es muy irregular. Técnicas más sofisticadas como el control por modo deslizante, difuso y adaptativo mejoran la robustez, pero a menudo dependen de modelos matemáticos muy precisos del motor y del agua circundante. En la práctica, esos modelos nunca son perfectos, y las discrepancias pueden provocar mayor rizado de par, recuperación más lenta tras perturbaciones y pérdida de energía. El Control Predictivo Basado en Modelo (MPC), que planifica movimientos de control óptimos en una ventana corta del futuro, ofrece respuesta rápida pero sigue estando muy condicionado por la calidad del modelo subyacente.
Un controlador híbrido que aprende sobre la marcha
Los autores proponen un marco híbrido de Control Predictivo basado en Modelo impulsado por Aprendizaje por Refuerzo (RL-MPC) que combina las fortalezas de ambos enfoques. El MPC utiliza un modelo matemático del CRPMSM para predecir cómo evolucionarán corrientes, par y velocidad en los próximos pasos de control y elige comandos de voltaje que deberían seguir las referencias de velocidad y corriente respetando los límites. Encima de esto, un agente de aprendizaje por refuerzo basado en el algoritmo Twin Delayed Deep Deterministic Policy Gradient (TD3) observa cómo se comporta el motor real. Al recibir recompensas cuando los errores de velocidad, los errores de corriente y el esfuerzo de control son pequeños, el agente de aprendizaje ajusta gradualmente las salidas del MPC para compensar errores de modelado, cargas desequilibradas y perturbaciones externas. Una etapa de modulación por ancho de pulso con vector de espacio convierte luego estos comandos de voltaje optimizados en señales de conmutación para el inversor que acciona el motor.
Poniendo a prueba el motor inteligente
Para evaluar su enfoque, los investigadores construyeron una simulación detallada de un sistema motor contra-rotante de 120 kW en MATLAB/Simulink y lo probaron bajo tres escenarios operativos realistas. En el primero, el motor funcionó a velocidad constante mientras la carga en ambos rotores cambiaba pero permanecía equilibrada; en el segundo, la velocidad se variaba con carga constante; en el tercero, el caso más exigente, los rotores experimentaron cargas diferentes mientras el punto de consigna de velocidad se mantenía fijo. En cada caso, RL-MPC se comparó directamente con el MPC convencional usando los mismos horizontes de predicción y control. 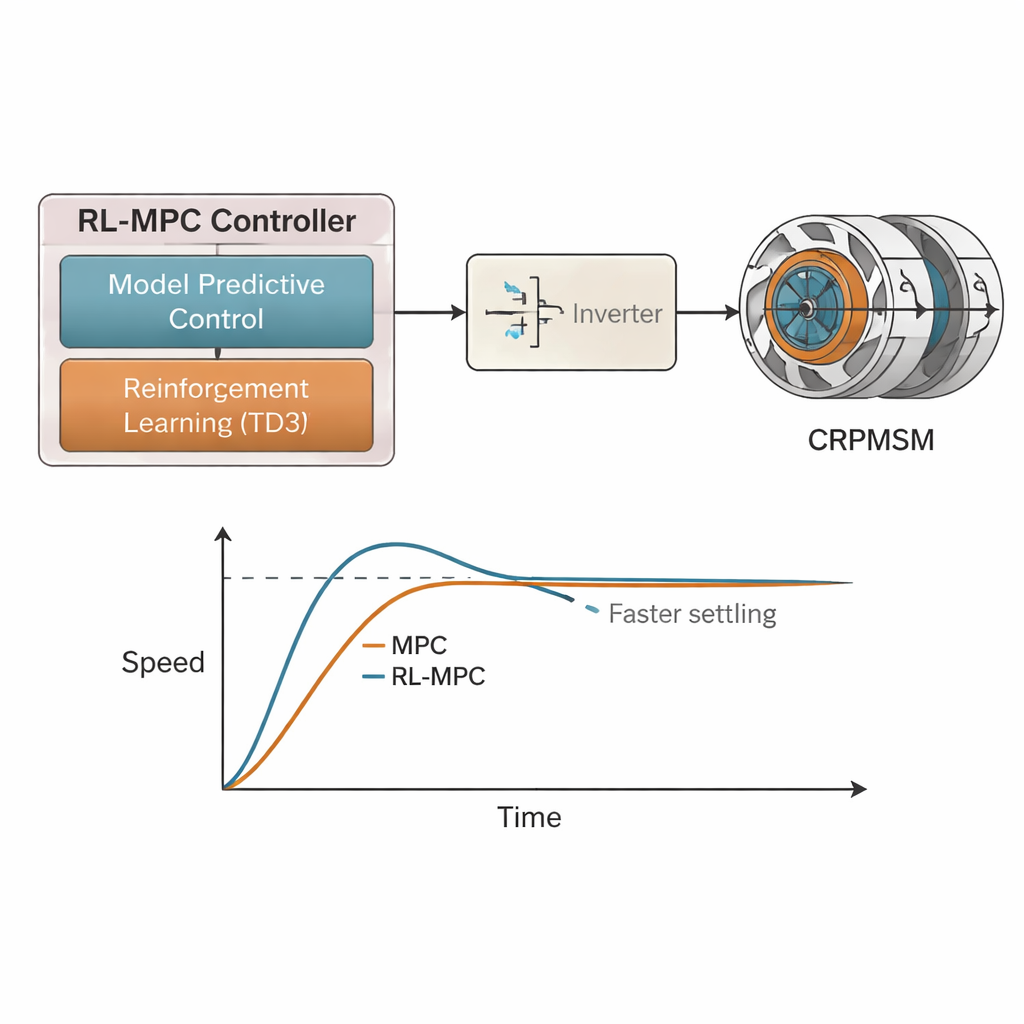
Respuesta más rápida, corrientes más limpias, mejor sincronización
El controlador híbrido RL-MPC superó de forma consistente al MPC estándar en todas las pruebas. Cuando las cargas o velocidades cambiaron repentinamente, RL-MPC redujo la sobremagnitud en la velocidad de aproximadamente un 30% a alrededor de 15–16,6% y redujo a la mitad el tiempo de asentamiento, de unos 1,4 segundos a 0,7 segundos. Los rizados de par fueron menores y los dos rotores contra-rotantes permanecieron estrechamente sincronizados, incluso cuando un rotor soportó carga mucho mayor que el otro. Igualmente importante, la calidad de las corrientes del estator mejoró notablemente: la distorsión armónica total cayó más de un 60% durante transientes de carga desequilibrada severos, bajando de 9,3% con MPC a 3,4% con RL-MPC, y hasta aproximadamente 2–3% en régimen permanente. Corrientes más limpias implican menos calentamiento, operación más silenciosa y mayor eficiencia global.
Qué significa esto para futuros vehículos subacuáticos
Para un lector no especializado, el mensaje central es que añadir una capa de aprendizaje sobre un controlador predictivo hace que los motores de los submarinos sean tanto más inteligentes como más resistentes. En lugar de depender únicamente de ecuaciones fijas que pueden fallar cuando el mar se vuelve agitado o el vehículo maniobra con brusquedad, el marco RL-MPC puede adaptarse en tiempo real, manteniendo el motor de doble rotor sincronizado, ágil y eficiente. Aunque los resultados hasta ahora se basan en simulación y necesitarán validación en hardware real y en mares reales, este trabajo apunta hacia vehículos subacuáticos futuros que viajen más lejos con la misma energía, produzcan menos ruido y se mantengan estables y controlables en condiciones exigentes.
Cita: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Palabras clave: propulsión de submarinos, motor contra-rotante, control por aprendizaje por refuerzo, control predictivo basado en modelo, vehículos subacuáticos