Clear Sky Science · es
Algoritmo conjunto de estimación de rango–ángulo–velocidad para radar FDA-MIMO basado en procesamiento de señales en grafos
Un radar más inteligente para un mundo concurrido y ruidoso
Desde coches autónomos hasta vigilancia aérea, la sociedad moderna depende en gran medida de sistemas de radar capaces de detectar y seguir objetos con rapidez y fiabilidad. A medida que los cielos, las carreteras y las ondas se congestionan, el radar debe distinguir múltiples objetivos en movimiento en presencia de interferencias y ruido intensos. Este artículo presenta una nueva forma de hacer que una potente clase de radares—conocida como radares FDA-MIMO—vea con mayor claridad en tres dimensiones (distancia, dirección y velocidad) utilizando herramientas de un campo emergente llamado procesamiento de señales en grafos.
Por qué importa esta nueva arquitectura de radar
Los radares tradicionales de antena en fase dirigen sus haces principalmente en ángulo, como girar una linterna hacia la izquierda o la derecha. Los radares de Matriz de Frecuencia Diversa (FDA) funcionan de forma diferente: cada elemento de antena transmite a una frecuencia ligeramente distinta. Ese pequeño giro hace que el patrón del haz dependa no solo del ángulo, sino también de la distancia y del tiempo. Cuando se combina con técnicas MIMO (entrada múltiple–salida múltiple), los radares FDA-MIMO pueden, en principio, localizar dónde se encuentra un objetivo en tres dimensiones: qué tan lejos está, en qué ángulo se sitúa y qué velocidad tiene. El desafío es extraer toda esa información de forma rápida y precisa a partir de los ecos en bruto, especialmente cuando hay muchos objetivos y las señales están enterradas en ruido.
Convertir los ecos del radar en un problema de red
Los autores abordan este reto reinventando las mediciones del radar como señales que residen en un grafo—una red de nodos y enlaces. Cada nodo en este grafo representa un par particular transmisor–receptor de la matriz FDA-MIMO, y los enlaces capturan cómo se relacionan las señales en nodos vecinos en el espacio. Al definir cuidadosamente estas conexiones, construyen una “matriz de adyacencia” que describe cómo deberían propagarse los ecos a lo largo de la matriz si un objetivo está a una distancia y un ángulo dados. Cuando el par distancia–ángulo supuesto coincide con el objetivo real, el patrón de ecos medido se alinea casi perfectamente con uno de los modos naturales de vibración del grafo. En la práctica, esto significa que, tras una versión basada en grafos de la transformada de Fourier, la energía se concentra en un pico muy nítido en un único componente espectral. El algoritmo busca tales picos en una cuadrícula de valores de distancia y ángulo para localizar los objetivos. 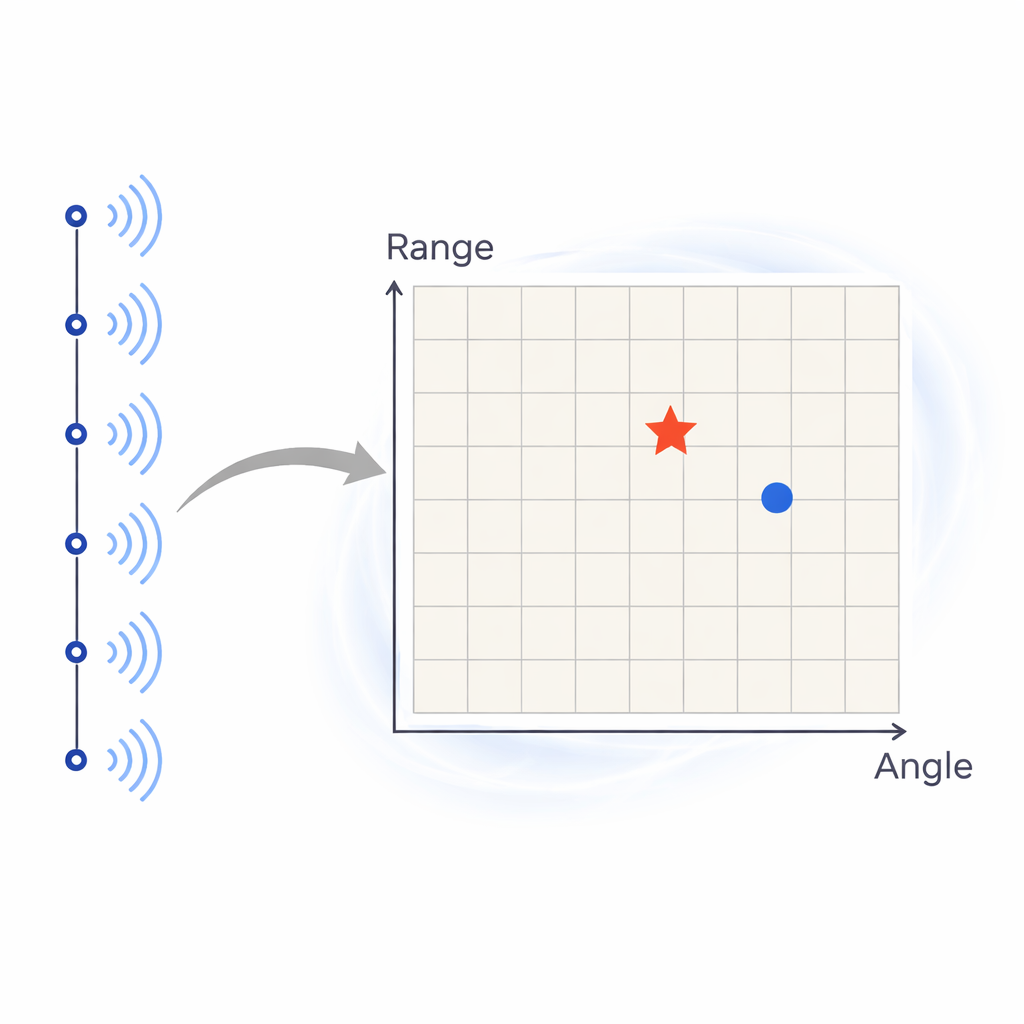
Añadir movimiento: medir la velocidad con la misma idea
Para estimar la rapidez con la que se mueve un objetivo, el método extiende el concepto de grafo a la dimensión temporal, a través de múltiples pulsos del radar. Ahora, cada nodo representa un pulso en el tiempo, y los enlaces conectan pulsos vecinos en un bucle para capturar cómo debería evolucionar la señal si el objetivo tiene una cierta velocidad radial. Una vez más, cuando la velocidad supuesta coincide con la velocidad real, la señal transformada muestra un pico concentrado en el dominio espectral del grafo. El algoritmo explora velocidades candidatas, buscando donde este pico es más fuerte. De forma crucial, los autores diseñan su marco para que las estimaciones de distancia–ángulo del grafo espacial y las estimaciones de velocidad del grafo temporal se refuercen mutuamente. Se combinan datos de todas las antenas y de todos los pulsos, formando una estructura multidimensional que mejora la precisión sin duplicar trabajo. 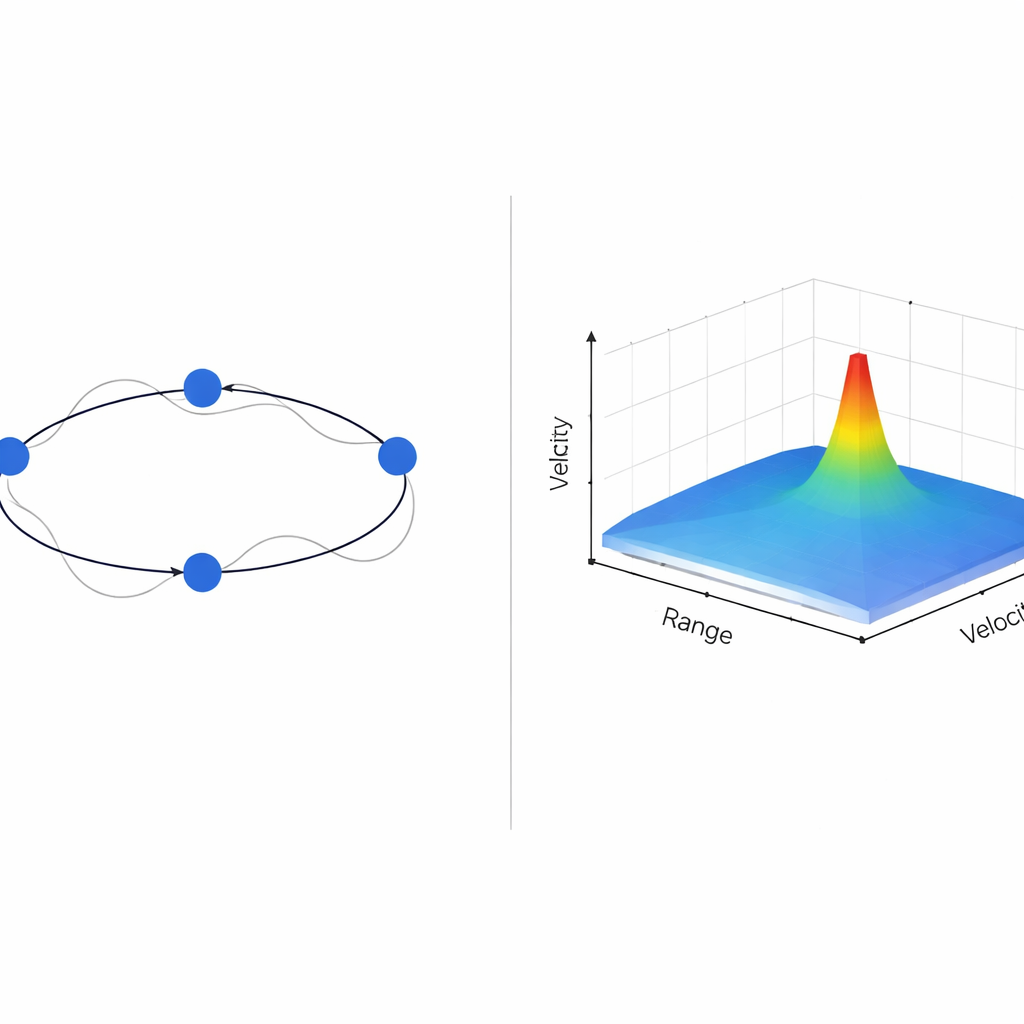
Poner el método a prueba
A través de una serie de simulaciones, los investigadores comparan su enfoque basado en grafos con una técnica de alta precisión ampliamente usada conocida como MUSIC. Prueban escenarios con uno y varios objetivos, examinan qué tan bien cada método separa objetos cercanos, y analizan el rendimiento cuando las señales son muy débiles en relación con el ruido. El algoritmo basado en grafos presenta una carga computacional global similar a la de los métodos clásicos, pero ofrece una resolución más nítida en distancia, ángulo y velocidad. Es especialmente eficaz suprimiendo picos falsos causados por el ruido, lo que conduce a mapas de objetivos más limpios y fiables. Incluso cuando la relación señal‑ruido es pobre—condiciones en las que muchos métodos tradicionales tienen dificultades—el nuevo algoritmo mantiene límites de error ajustados sobre la posición de los objetivos y su velocidad.
Qué significa esto para el radar en el mundo real
En términos sencillos, este trabajo muestra cómo tratar los datos de radar como señales que residen en una red permite un procesamiento más inteligente que puede separar con mayor claridad los objetivos reales del ruido y el clutter. Para aplicaciones que van desde la defensa y el control del tráfico aéreo hasta la seguridad automotriz y la sensorización ambiental, la técnica propuesta promete un seguimiento más preciso de múltiples objetos en movimiento en condiciones difíciles, sin exigir cantidades de cálculo poco realistas. Al fusionar el diseño avanzado de antenas con matemáticas basadas en grafos, los autores demuestran una vía práctica hacia radares que ven más lejos, con mayor nitidez y con mayor fiabilidad en un entorno electromagnético cada vez más complejo.
Cita: Li, Q., Meng, A., Liao, K. et al. A joint range–angle–velocity estimation algorithm for FDA-MIMO radar based on graph signal processing. Sci Rep 16, 6000 (2026). https://doi.org/10.1038/s41598-026-36124-x
Palabras clave: detección por radar, seguimiento de objetivos, procesamiento de señales, procesamiento de señales en grafos, FDA-MIMO