Clear Sky Science · es
Algoritmo A* consciente de la dirección y autoadaptativo con heurística PPO para la planificación de rutas de UAV en la ciudad inteligente
Rutas más inteligentes para drones urbanos
Imagínese flotas de pequeños drones de reparto entre los rascacielos, llevando medicinas, paquetes o suministros de emergencia por una ciudad concurrida. Para volar de forma segura y rápida, cada dron debe decidir constantemente hacia dónde dirigirse. Este artículo presenta una nueva forma para que los drones encuentren rutas mejores en espacios urbanos tridimensionales densos, haciendo sus trayectorias más cortas, suaves y fiables que con los métodos tradicionales.

Por qué es tan difícil encontrar una buena ruta
Para un dron, elegir una ruta es algo más que dibujar una línea recta del punto A al punto B. Debe sortear edificios, árboles y zonas de exclusión aérea respetando límites de giro y altitud. Los métodos clásicos de planificación de rutas, como el conocido algoritmo A*, funcionan bien en mapas sencillos pero tienen dificultades en entornos urbanos 3D realistas. A menudo exploran demasiadas opciones posibles, desperdician potencia de cálculo y pueden producir rutas en zigzag más largas de lo necesario o incluso fallar cuando el entorno está muy congestionado. A medida que las ciudades inteligentes se vuelven más complejas, estas debilidades se convierten en un cuello de botella serio para el tráfico aéreo seguro y eficiente.
Una mejora consciente de la dirección para una herramienta clásica
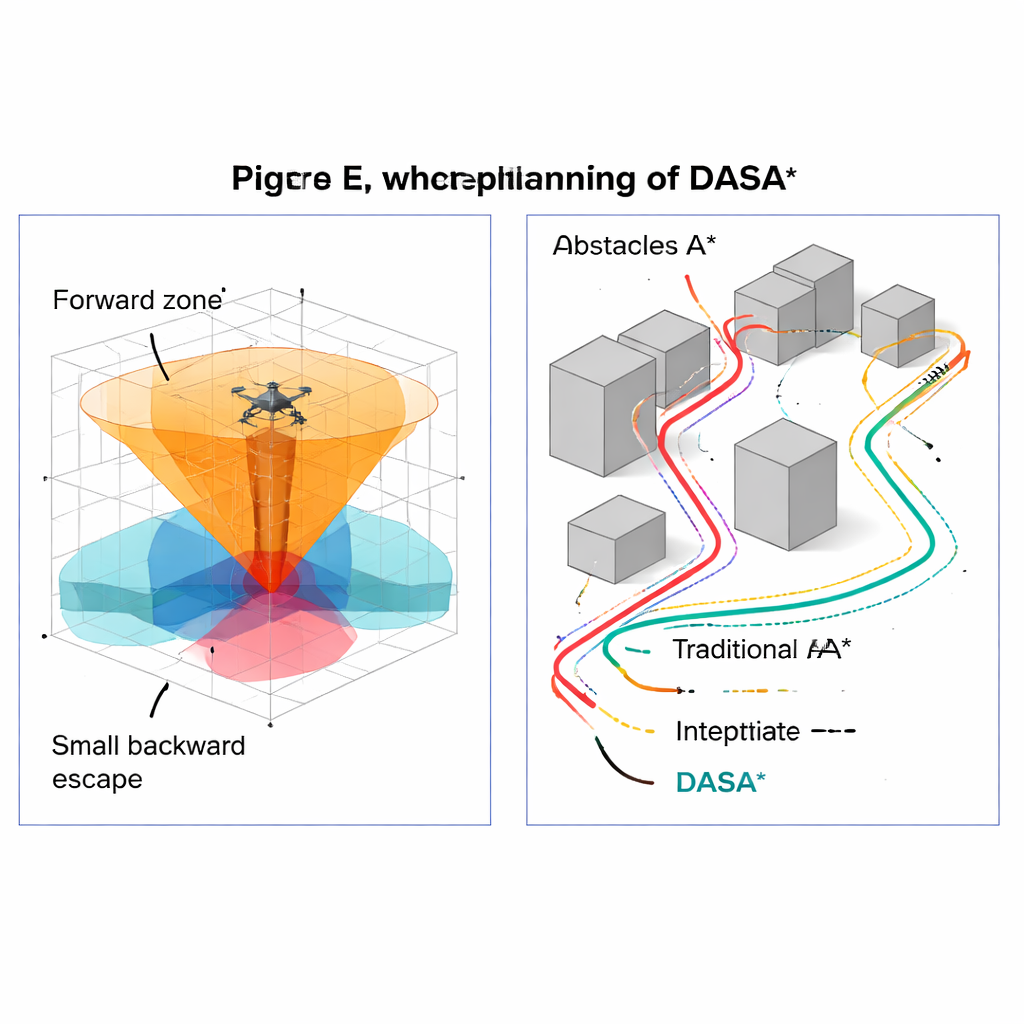
Los autores parten del algoritmo A* y proponen una versión mejorada llamada DASA* (A* consciente de la dirección y autoadaptativo). En lugar de buscar ciegamente en todas las direcciones alrededor del dron, DASA* presta atención a dónde está el objetivo. Clasifica las posiciones candidatas cercanas en tres capas: las situadas mayormente por delante del dron en dirección al objetivo, las laterales y un pequeño conjunto detrás que puede ayudar a escapar de callejones sin salida. Un detector de estancamiento sencillo vigila señales de que la búsqueda se está “atascando” y amplía automáticamente la búsqueda de un cono frontal estrecho a un vecindario más amplio cuando es necesario. Esta expansión cuidadosa y alineada con el objetivo reduce la exploración innecesaria al tiempo que garantiza que se encontrará una ruta válida si existe.
Adaptarse a espacios concurridos y abiertos
Otra característica clave de DASA* es que cambia su ritmo según el entorno. Cuando el dron está lejos de obstáculos, el algoritmo da pasos más largos, cubriendo rápidamente el espacio abierto. Al aproximarse a edificios u otros peligros, cambia a pasos más cortos, permitiendo maniobras precisas en huecos estrechos. Este “nivel de zoom” variable permite al planificador moverse rápido donde es seguro y reducir la velocidad solo cuando la precisión importa. Tras hallar una ruta preliminar, una etapa de ajuste dedicada elimina puntos de paso innecesarios y adapta una curva suave a través de los puntos clave restantes. El resultado es una trayectoria que no solo evita colisiones, sino que también se parece más a un vuelo natural que elegiría un piloto experimentado, con menos giros bruscos.
Enseñar al algoritmo a mirar hacia adelante
El A* tradicional se basa en fórmulas de distancia simples para estimar cuán lejos está cada posición del objetivo. DASA* sustituye esas conjeturas por una guía aprendida basada en Proximal Policy Optimization (PPO), una técnica moderna de aprendizaje por refuerzo. En un entorno de entrenamiento, un agente virtual practica repetidamente moverse hacia un objetivo en espacio 3D mientras percibe distancias, diferencias de altura e información direccional. Una red neuronal aprende gradualmente cuán prometedora es cada situación y, tras el entrenamiento, funciona como un módulo de “intuición” enchufable para DASA*. Esta heurística aprendida dirige la búsqueda más directamente hacia buenas soluciones, especialmente en disposiciones complejas donde la distancia en línea recta es engañosa.
Qué tan bien funciona en ciudades virtuales
Los investigadores evaluaron DASA* en múltiples escenarios urbanos 3D simulados llenos de edificios en forma de caja y obstáculos cilíndricos que imitan estructuras urbanas reales. Lo compararon con el A* clásico y varias alternativas populares, incluidas versiones mejoradas de rapidly exploring trees, enjambres de partículas, evolución diferencial y otra variante de A* llamada Theta*. En muchos casos de prueba, DASA* encontró constantemente rutas más cortas, expandió muchos menos puntos candidatos y se ejecutó mucho más rápido: a menudo de 10 a 50 veces más rápido que el A* estándar. También mantuvo una tasa de éxito perfecta o casi perfecta incluso en entornos densos tipo laberinto, mientras que algunos métodos competidores fallaron con más frecuencia o produjeron desvíos largos y en bucle.
Qué significa esto para la vida cotidiana
En términos sencillos, DASA* da a los robots voladores una mejor orientación y criterio. Al centrarse en direcciones prometedoras, adaptar su nivel de detalle al entorno local, usar un sentido aprendido de cuán cerca está del éxito y pulir la ruta final, convierte datos de mapas en trayectorias de vuelo eficientes, suaves y prácticas. Si se adopta en sistemas reales, este enfoque podría ayudar a las futuras ciudades inteligentes a gestionar entregas por dron, inspecciones y respuestas de emergencia con mayor seguridad y fiabilidad, incluso cuando los cielos se vuelvan más concurridos y los entornos más complejos.
Cita: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Palabras clave: planificación de rutas de UAV, drones en ciudades inteligentes, algoritmo A*, navegación autónoma, planificación de movimiento de robots