Clear Sky Science · es
Estrategia de control sensorless de posición de dominio a plena velocidad para PMSM basada en un observador deslizante super-twisting mejorado y optimización de transición suave
Mantener los motores eléctricos inteligentes sin hardware adicional
Desde los coches eléctricos hasta los actuadores de aeronaves, muchas máquinas modernas dependen de un tipo especial de motor eléctrico llamado motor síncrono de imanes permanentes (PMSM). Estos motores son eficientes y potentes, pero por lo general requieren sensores delicados para seguir su velocidad de giro y la posición del rotor. Los sensores aumentan el coste y pueden fallar en entornos adversos. Este estudio explora cómo hacer funcionar estos motores de forma suave y precisa en todo su rango de velocidades sin usar ningún sensor mecánico.
Por qué deshacerse de los sensores es tan difícil
En un accionamiento típico de PMSM, se montan pequeños sensores de posición en el eje del motor para decirle al sistema de control exactamente dónde está el rotor. Esa información es crucial para aplicar corriente en las bobinas en el momento justo, como un empujón cuidadosamente sincronizado en un carrusel giratorio. Sin embargo, los sensores pueden ser frágiles, voluminosos y caros. Los ingenieros llevan tiempo intentando reemplazarlos con métodos “sin sensores” que infieren la posición del rotor a partir de las señales eléctricas del propio motor. El problema es que ningún método funciona bien a todas las velocidades. A baja velocidad las señales eléctricas habituales son débiles, mientras que a alta velocidad los trucos simples se vuelven ruidosos e imprecisos. Salvar esa brecha sin sacudidas, vibraciones ni pérdida de control ha sido un desafío persistente.
Dos formas ingeniosas de escuchar al motor
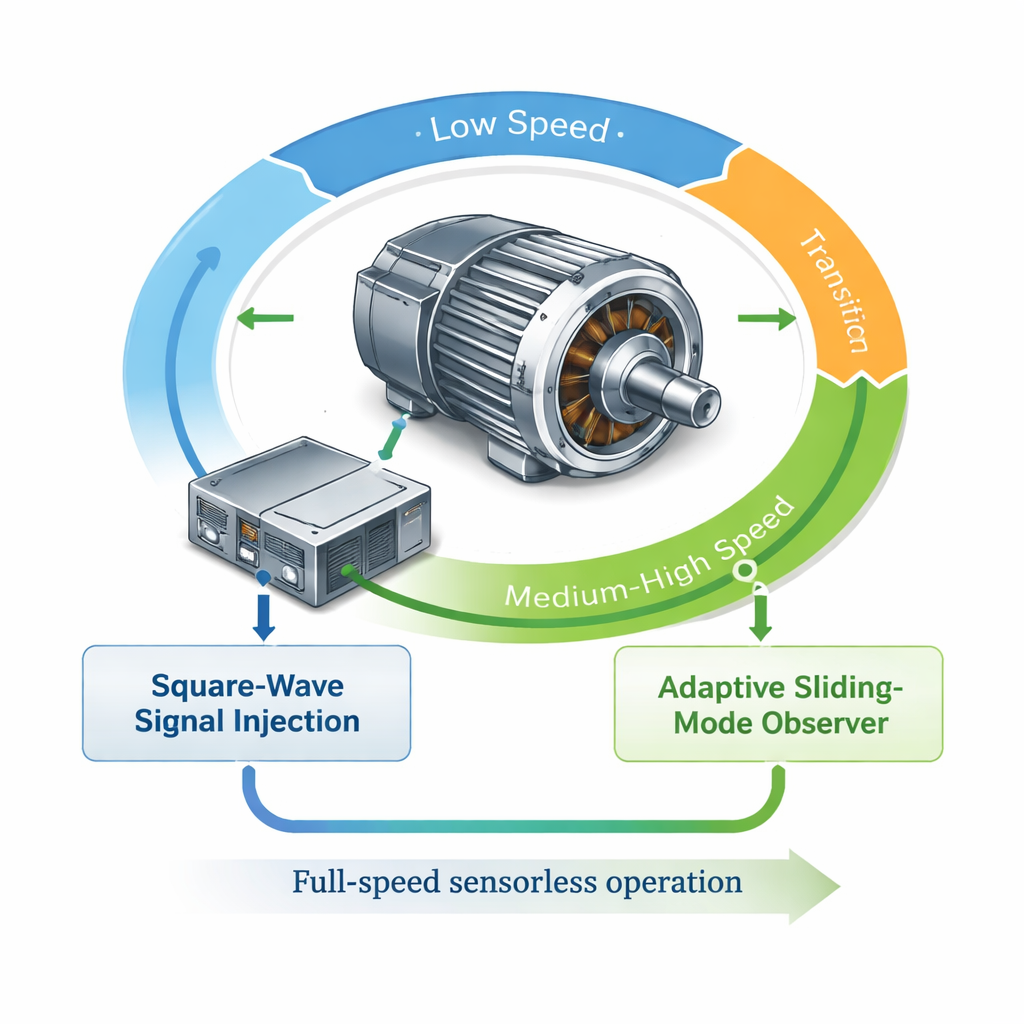
Para cubrir todo el rango de velocidades, los autores combinan dos técnicas sensorless complementarias. A bajas velocidades, donde la retroalimentación eléctrica natural del motor es demasiado pequeña para medir con fiabilidad, inyectan deliberadamente una señal de tensión rápida y de forma cuadrada en las bobinas. El motor responde de manera diferente según el ángulo del rotor, por lo que al examinar la corriente de alta frecuencia resultante, el controlador puede deducir la posición del rotor. Este enfoque de “inyección de alta frecuencia” actúa como enviar una señal de sondeo suave y leer el eco. A velocidades medias y altas, el motor produce una retroalimentación natural más fuerte, conocida como fuerza contraelectromotriz. Aquí, el equipo utiliza un observador matemático avanzado que sigue el comportamiento del motor y estima la posición y la velocidad del rotor a partir de las tensiones y corrientes medidas.
Hacer al observador digital más inteligente y silencioso
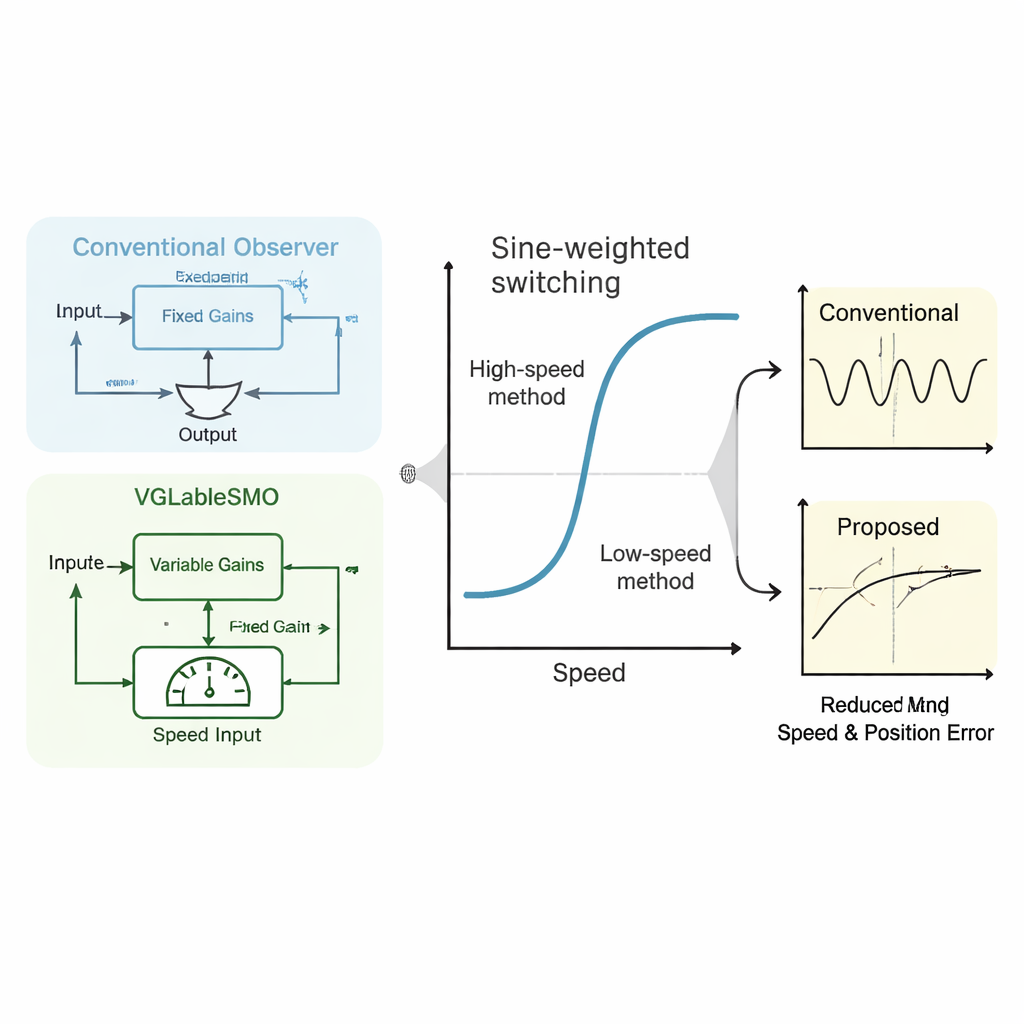
La innovación central en el lado de alta velocidad es un observador mejorado llamado observador por modo deslizante super-twisting lineal de ganancia variable (VGLSTSMO). Los observadores por modo deslizante tradicionales son apreciados por su robustez frente al ruido y las perturbaciones, pero a menudo sufren de “chattering”, oscilaciones pequeñas y rápidas que pueden transmitirse al par y a la velocidad. Además, dependen de parámetros fijos internos que pueden funcionar bien en una condición de operación y mal en otra. El observador propuesto ajusta automáticamente sus ganancias internas a medida que cambia la velocidad del motor y añade un término corrector que atrae suavemente las estimaciones hacia los valores reales. Un mecanismo adaptativo refina además la estimación de la tensión interna del motor, mejorando la precisión tanto de la velocidad como de la posición. Las simulaciones por ordenador muestran que este observador más inteligente reduce el error de posición en velocidades medias–altas de aproximadamente 0,9 radianes a cerca de 0,2 radianes y acorta el tiempo que tarda el sistema en estabilizarse tras un cambio de carga.
Suavizar el intercambio entre bajas y altas velocidades
Hacer funcionar dos métodos de estimación distintos plantea otro problema: cómo transferir la acción entre ellos de forma suave al acelerar el motor. Un enfoque simple es desvanecer un método y activar el otro usando una ponderación lineal, pero eso aún puede causar baches en el par y la velocidad. Los autores proponen una función de ponderación más suave, con forma de seno. Dentro de una banda de transición elegida, el sistema de control desplaza gradualmente la confianza del método de baja velocidad al observador de alta velocidad siguiendo una curva ondulada y suave en lugar de una rampa brusca. Esta mezcla refinada reduce notablemente los saltos de velocidad y los fallos de ángulo durante el cambio, disminuyendo el error angular transitorio y reduciendo a la mitad el tiempo que tardan en asentarse los errores.
Qué significa esto para las máquinas del mundo real
En conjunto, la estrategia combinada —sondear el motor a baja velocidad, usar un observador adaptativo a velocidades mayores y conmutar entre ellos con una ponderación senoidal suave— ofrece un control estable y preciso en todo el rango de velocidades sin sensores mecánicos. En simulaciones, el método propuesto mantiene pequeñas las sobreoscilaciones de velocidad y los errores en régimen permanente mientras evita el chattering agresivo que puede causar ruido, desgaste e incomodidad. Para aplicaciones cotidianas, esto significa que vehículos eléctricos, accionamientos industriales y sistemas de propulsión podrían volverse más fiables, más compactos y más baratos de fabricar, manteniendo un control de movimiento preciso sin depender de sensores montados en el eje, que son frágiles.
Cita: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Palabras clave: control de motor sin sensores, motor síncrono de imanes permanentes, observador por modo deslizante, inyección de señal de alta frecuencia, sistemas de accionamiento eléctrico