Clear Sky Science · es
Influencia de los parámetros estructurales en el espacio de trabajo de robots paralelos tipo delta y optimización de la adaptabilidad de la trayectoria para aplicaciones de clasificación de hojas de té frescas
Los robots llegan a la fábrica de té
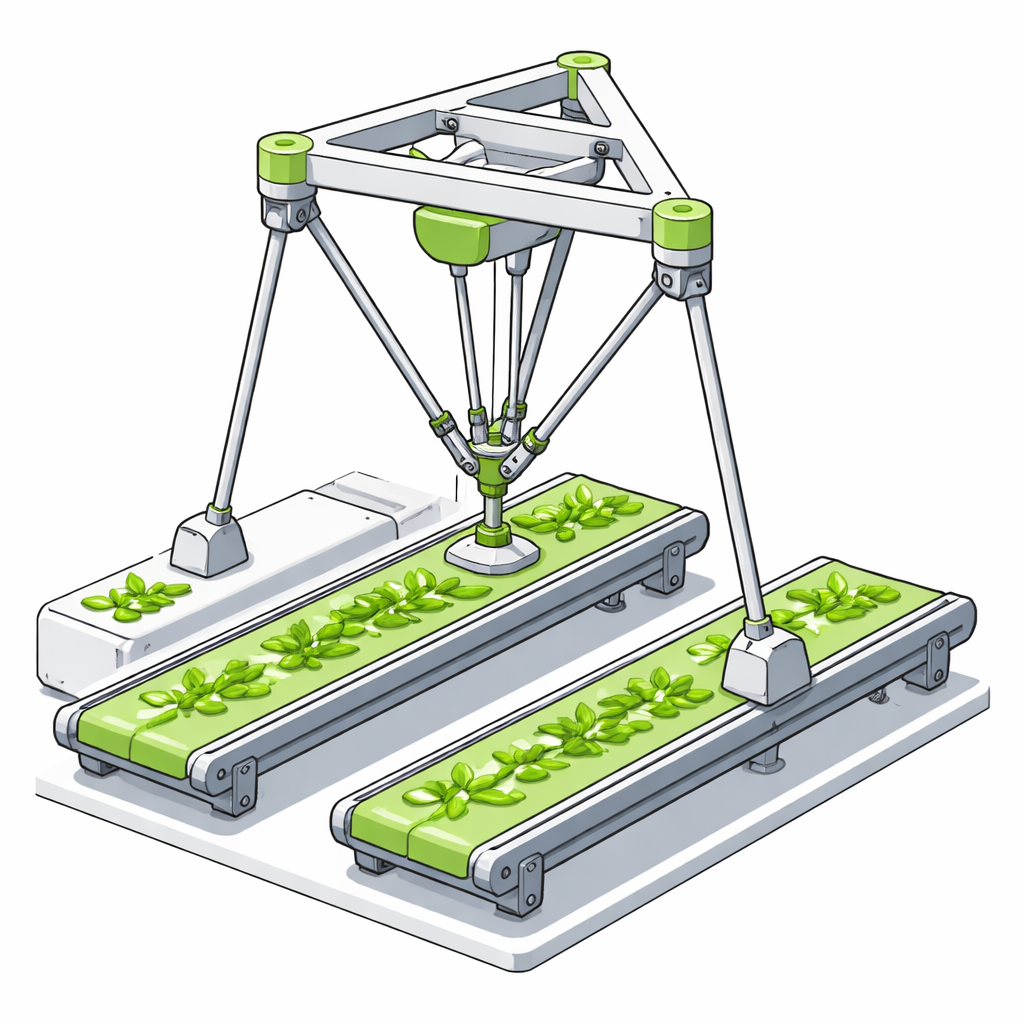
Las hojas de té frescas son delicadas: aplastar un brote o magullar una hoja degrada la infusión final. Sin embargo, clasificar estas hojas a mano es un trabajo cansado y lento. Este artículo explora cómo un robot industrial rápido y ligero —conocido como robot Delta— puede ajustarse para moverse con rapidez y precisión sobre las cintas transportadoras de té, al tiempo que manipula las hojas con suavidad y fiabilidad.
Por qué las hojas de té requieren un trato especial
En el procesamiento moderno del té, clasificar las hojas frescas es vital para la calidad y el precio. Los operarios humanos tienen dificultades para mantener el ritmo y la consistencia, especialmente durante turnos largos. Los robots Delta, ampliamente usados en envasado de alta velocidad, parecen una opción natural: son rígidos, precisos y pueden desplazarse a velocidades impresionantes. Sin embargo, la mayoría de los diseños previos se dirigían a objetos genéricos como cajas o tuercas, no a brotes frágiles confinados en una zona estrecha entre dos cintas transportadoras. El “espacio de trabajo” del robot —la región tridimensional que puede alcanzar— debe ajustarse a esta área limitada y seguir un movimiento específico con forma de compuerta: agarrar, levantar, trasladar y colocar, todo sin chocar con sus propias partes ni fallar en los objetivos.
Cómo la geometría del robot controla dónde puede llegar
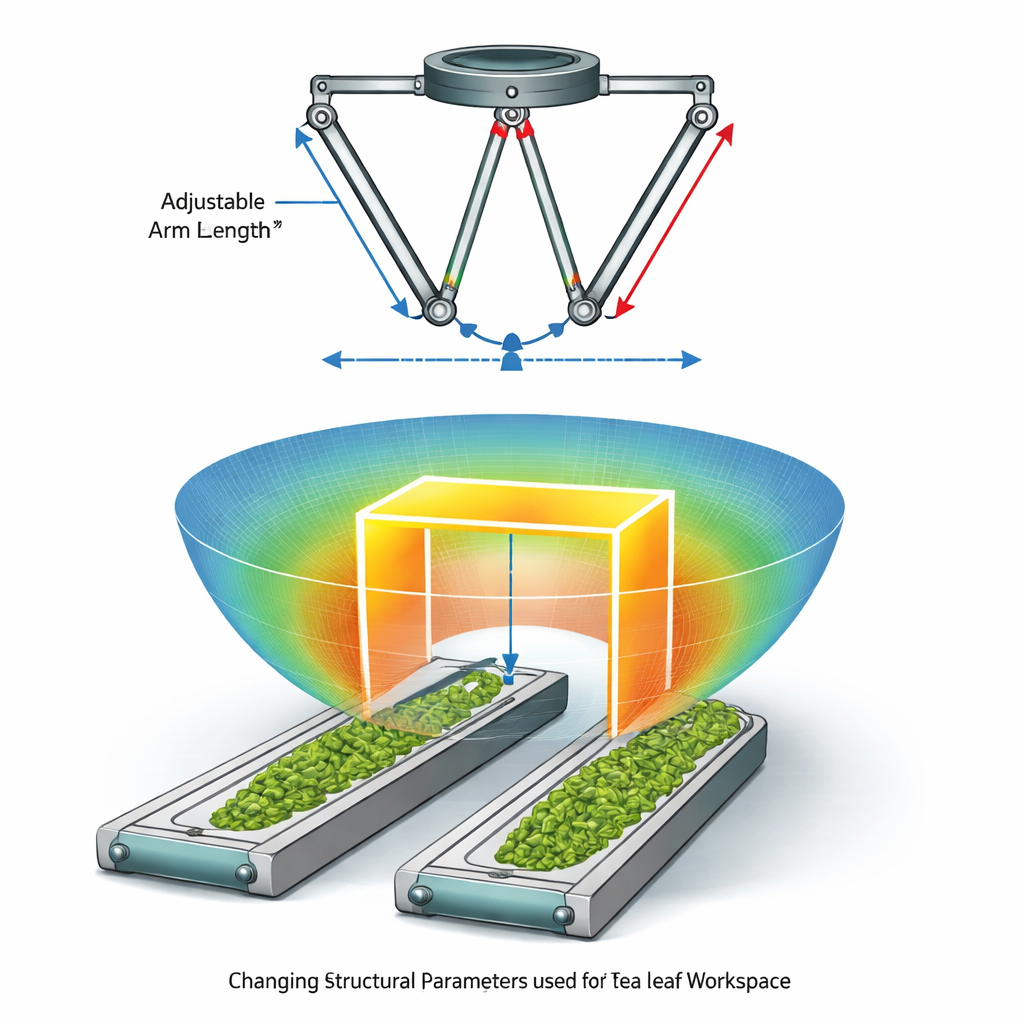
Los autores comienzan construyendo una descripción matemática detallada del movimiento del robot Delta. Relacionan los ángulos de sus tres juntas motrices con la posición exacta de la pequeña plataforma móvil que lleva una ventosa. Usando cálculos directos (ángulos a posición) e inversos (posición a ángulos), definen cada punto que el efector final puede alcanzar físicamente cuando los ángulos de las articulaciones se limitan a un rango seguro. Con estas ecuaciones implementadas en MATLAB, simulan el volumen completo alcanzable del robot y lo muestran desde varios puntos de vista como una nube de puntos colorida en forma de cuenco. Este espacio de trabajo sirve luego de base para evaluar si un diseño mecánico dado puede encargarse de la trayectoria de clasificación del té.
Probar muchos diseños con experimentos virtuales
En lugar de construir múltiples prototipos físicos, el equipo trata cuatro elecciones geométricas clave como mandos de diseño: la longitud de los brazos superiores (L), la longitud de los brazos inferiores (l), el radio del triángulo de la base fija (R) y el radio del triángulo móvil (r). Utilizan un diseño experimental ortogonal, que muestrea de forma eficiente combinaciones de estos cuatro parámetros en tres niveles cada uno, produciendo nueve robots virtuales. Para cada uno, el programa calcula el volumen total del espacio de trabajo y muestra cómo se solapa con una caja de trayectoria estandarizada en forma de compuerta que mide 200 mm de alto, 400 mm de ancho y 200 mm de profundidad. Esto permite a los investigadores ver no solo cuán grande es cada espacio de trabajo, sino también si cubre realmente la región donde viajan las hojas sobre las cintas.
Determinar qué dimensiones importan más
Comparando los nueve diseños simulados, el estudio clasifica la influencia de cada elección estructural sobre el alcance utilizable. El claro ganador es la longitud del brazo pasivo (inferior): brazos inferiores más largos aumentan considerablemente el espacio de trabajo. En segundo lugar está la longitud del brazo activo (superior), que también amplía el alcance pero puede introducir vibraciones si se hace demasiado largo. El radio de la base tiene un efecto moderado; si la base es demasiado ancha, los brazos móviles chocan con más facilidad contra el bastidor, reduciendo el volumen verdaderamente utilizable. El radio de la plataforma móvil tiene el efecto más débil, aunque una plataforma más pequeña ayuda ligeramente al dejar más espacio para el movimiento de los brazos. Los análisis de rango y varianza muestran que, aunque algunos conjuntos de parámetros producen el mayor espacio total, no siempre cubren la estrecha región en forma de compuerta que importa para la clasificación del té.
Un diseño que encaja con la línea de té
La configuración más práctica no resulta ser la de mayor volumen total, sino la cuyo espacio de trabajo envuelve con precisión la trayectoria en forma de compuerta. Una combinación particular —brazos superiores de 250 mm, brazos inferiores de 400 mm, radio de base de 90 mm y radio de la plataforma móvil de 50 mm— cubre completamente la trayectoria requerida entre las dos cintas transportadoras manteniendo el robot compacto y estable. A una altura de operación alrededor de 325 mm sobre el plano de referencia, el robot alcanza su mayor amplitud utilizable, más que suficiente para abarcar ambas cintas y completar el ciclo agarrar–levantar–trasladar–colocar sin salir de la zona segura.
Qué significa esto para las futuras fábricas de té
Para no especialistas, el mensaje clave es que pequeños cambios en la longitud de las extremidades del robot y en el tamaño de la plataforma pueden marcar la diferencia entre una máquina que simplemente se mueve de forma impresionante en el espacio abierto y otra que funciona de manera fiable en una línea de producción real. Al cuantificar cómo cada parámetro estructural moldea el volumen alcanzable y su solapamiento con una trayectoria realista en forma de compuerta, este estudio ofrece una receta para diseñar robots Delta que clasifiquen hojas de té con rapidez, precisión y el mínimo daño. El mismo enfoque puede guiar robots a medida para otros alimentos o productos frágiles donde velocidad, precisión y manejo delicado deben satisfecharse simultáneamente.
Cita: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Palabras clave: robot delta, clasificación de hojas de té, espacio de trabajo del robot, recoger y colocar, automatización industrial