Clear Sky Science · es
Desarrollo y evaluación de un sistema de posicionamiento de pacientes guiado por superficie para la terapia de captura de neutrones por boro
Apuntado más preciso para neutrones contra el cáncer
La terapia de captura de neutrones por boro (BNCT) es un tratamiento prometedor contra el cáncer que puede dañar selectivamente las células tumorales mientras preserva gran parte del tejido sano circundante. Pero para que esta precisión funcione, los médicos deben colocar al paciente en el punto exacto frente a un haz de neutrones fijo, a menudo con tolerancias del orden del milímetro. Este artículo describe un nuevo sistema de posicionamiento guiado por cámara y robot diseñado para que esa preparación delicada sea más rápida, más precisa y menos dependiente de la destreza y el criterio del técnico.
Por qué el posicionamiento importa tanto
A diferencia de muchas máquinas modernas de radiación que pueden girar alrededor del paciente y remodelar sus haces de rayos X, la BNCT depende de una fuente de neutrones pesada y fija con opciones limitadas para desviar el haz. Es el paciente, no el haz, el que debe moverse hasta la posición correcta. Tradicionalmente, el personal usa láseres, marcas en la piel y desplazamientos manuales de la camilla para conseguirlo. Ese proceso es lento, depende en gran medida de la habilidad del operador y puede dejar pequeños errores de posición que modifican la dosis que recibe el tumor —y los órganos cercanos— en la práctica. A medida que se abren centros de BNCT para tratar tumores complejos en cabeza, cuello y otras zonas de difícil acceso, estas limitaciones se convierten en un problema serio.
Un ayudante de alta tecnología: cámaras, software y un robot
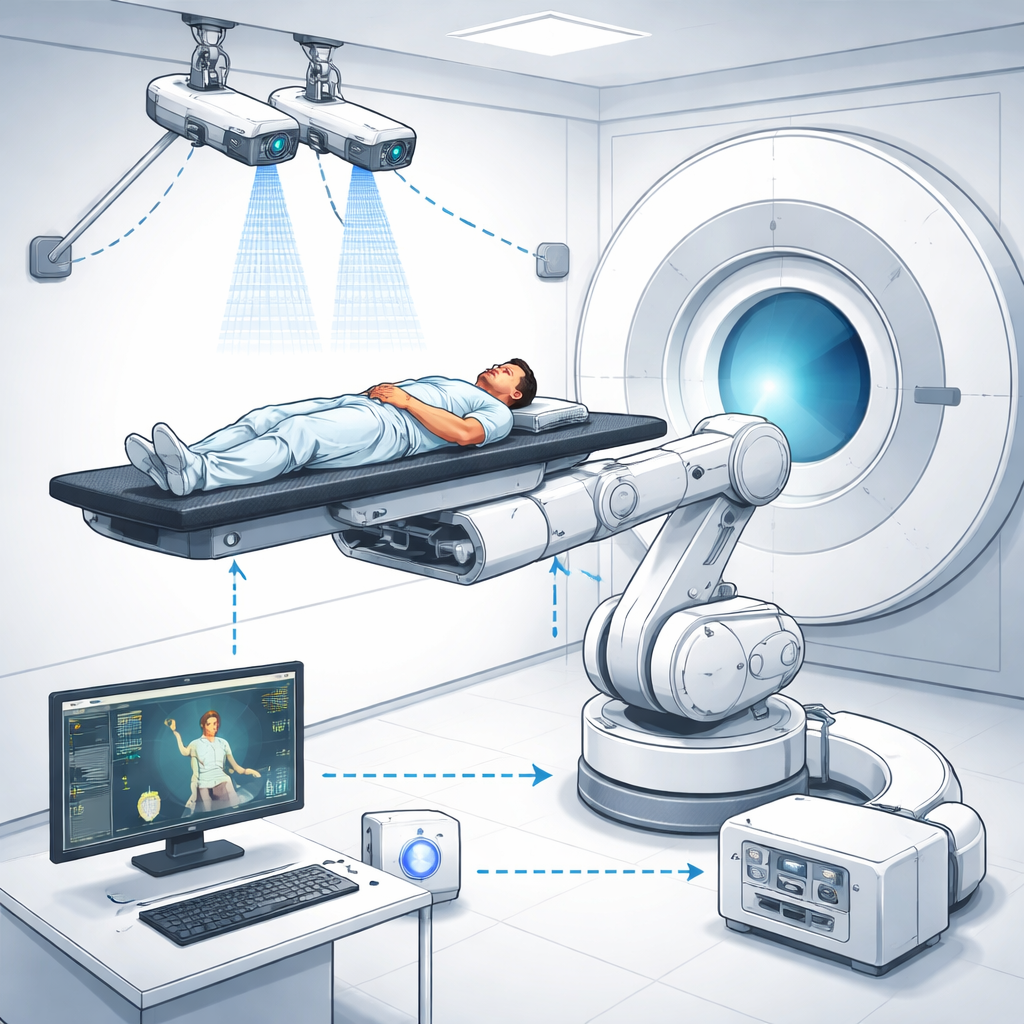
Para afrontar este problema, el equipo de investigación construyó un sistema integrado Surface-Guided BNCT (SG‑BNCT) que combina tres piezas principales: un programa especializado de planificación del tratamiento llamado NeuMANTA, un par de cámaras estéreo binocular y un robot industrial de seis ejes que sostiene la camilla de tratamiento. En NeuMANTA, los médicos planifican el tratamiento BNCT sobre imágenes de TC, incluyendo el punto exacto por donde debe pasar el haz de neutrones y tres pequeñas marcas de referencia, o marcadores fiduciales, sobre la piel del paciente. Estos marcadores definen la posición del paciente en las imágenes de planificación y vinculan ese plan con las coordenadas de la sala de tratamiento mediante matrices de transformación matemática.
Cómo las cámaras 3D ven y corrigen la preparación
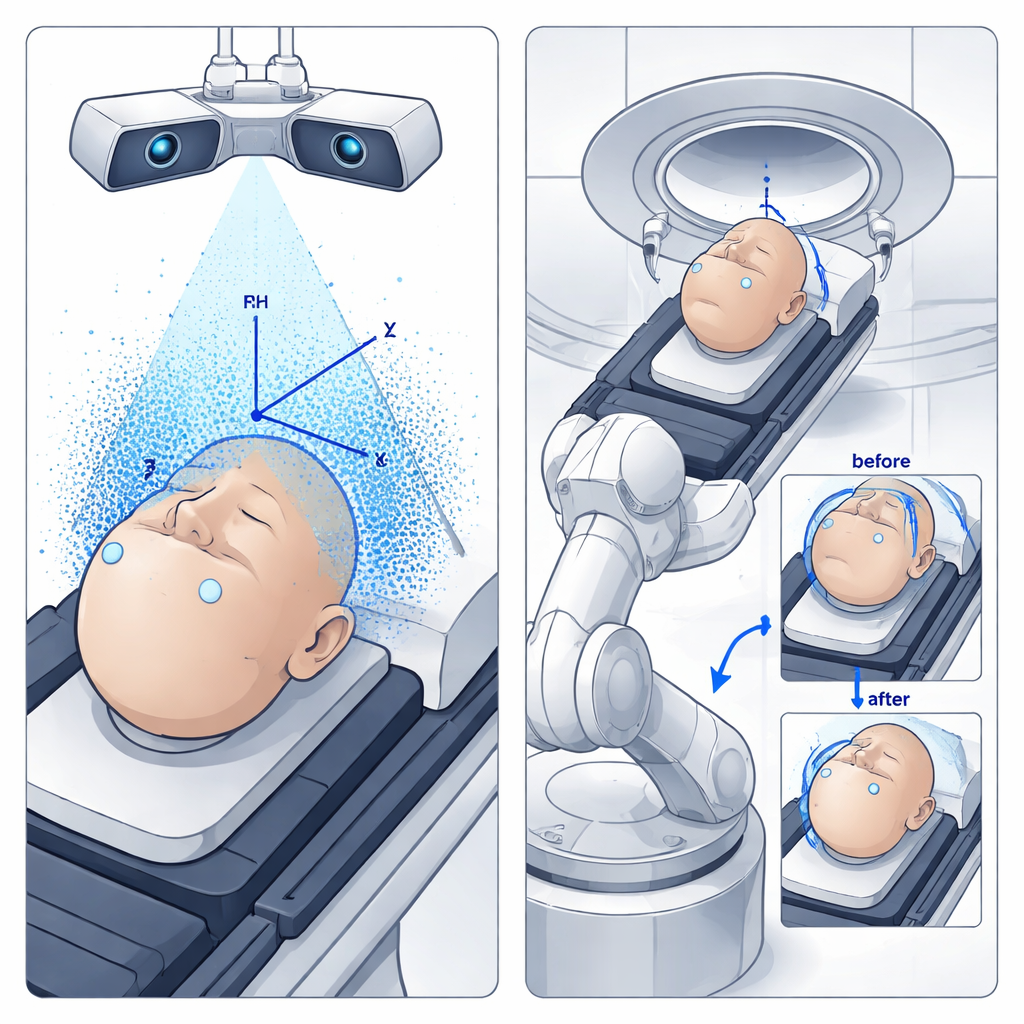
En la sala de tratamiento, dos cámaras de alta resolución vigilan al paciente desde ángulos distintos, de forma análoga a los ojos humanos. Utilizando un algoritmo moderno de detección de objetos (YOLO) entrenado con más de mil imágenes, el sistema localiza rápidamente los mismos marcadores fiduciales en la superficie del paciente. Al comparar cómo aparece cada marcador en las vistas de la cámara izquierda y la derecha, el ordenador reconstruye sus posiciones 3D y crea una nube de puntos detallada de la superficie. A partir de tres marcadores no colineales, reconstruye un sistema de coordenadas del paciente y lo compara con el sistema de coordenadas definido en el plan de tratamiento. Cualquier desajuste entre la posición planificada y la real se convierte en comandos de traslación y rotación —seis grados de libertad en total— para el robot industrial que soporta la camilla del paciente.
Pruebas con un paciente simulado
Antes de usar el sistema en pacientes reales, el equipo lo probó con un fantoma antropomórfico —un modelo con forma humana— equipado con marcadores internos y superficiales visibles tanto en las exploraciones de TC como para las cámaras. Crearon múltiples configuraciones de tratamiento en NeuMANTA con diferentes direcciones de haz y luego pidieron al sistema SG‑BNCT que reprodujera automáticamente esos planes moviendo el fantoma a la posición prevista. Un láser situado en el centro de la apertura del haz de neutrones actuó como sustituto del haz real, de modo que los investigadores pudieron medir directamente cuánto se desviaba el punto final en el fantoma respecto al blanco previsto, tanto a lo largo de la dirección del haz (distancia fuente‑a‑piel) como lateralmente en el plano perpendicular al haz.
¿Qué tan cerca llegó el sistema?
En 24 configuraciones experimentales, los errores de posicionamiento del sistema fueron típicamente inferiores a 1 milímetro en ambas direcciones, siendo los peores errores en una sola pasada del orden de 2 a 3 milímetros a lo largo del eje del haz. Los autores atribuyeron estas discrepancias residuales a tres fuentes principales: el grosor de los cortes de las imágenes de TC, pequeñas incertidumbres de calibración en las cámaras estéreo y minúsculas imprecisiones a nivel de píxel cuando el software detecta los marcadores. Es importante que el sistema esté diseñado para operar en bucle cerrado: vuelve a medir repetidamente las posiciones de los marcadores, actualiza el alineamiento 3D y ordena movimientos finos adicionales del robot hasta que el error restante cae por debajo de un umbral predefinido. En estas pruebas iterativas, las desviaciones finales bajaron consistentemente a mucho menos de 1 milímetro, logrando una alineación submilimétrica en profundidad y en dirección lateral.
Qué significa esto para los pacientes
Para los pacientes que pueden beneficiarse de la BNCT —especialmente aquellos con tumores en regiones complejas o sensibles— este sistema de posicionamiento guiado por superficie y asistido por robot promete tratamientos más fiables y eficientes. Al vincular el software de planificación directamente con cámaras que ven al paciente real y con un robot capaz de ejecutar movimientos precisos, el método reduce la dependencia de la alineación manual con láseres y del juicio humano. Aunque la versión actual es demasiado lenta para un seguimiento de movimiento verdaderamente en tiempo real y hasta ahora solo se han realizado pruebas estáticas, los resultados muestran que la tecnología puede posicionar rutinariamente a un paciente con precisión submilimétrica. Con mejoras de velocidad y endurecimiento frente a la radiación del hardware, este enfoque podría convertirse en una base práctica para tratamientos de BNCT más seguros y consistentes en la clínica.
Cita: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Palabras clave: terapia de captura de neutrones por boro, posicionamiento del paciente, visión estéreo, robótica médica, guía por superficie