Clear Sky Science · es
Aplicación de una red convolucional temporal fusionada con un módulo de atención por canal para posicionamiento interior UWB
Por qué es tan difícil localizar a las personas en interiores
Los teléfonos inteligentes, los robots y los vehículos autónomos en almacenes necesitan saber con precisión dónde se encuentran, incluso cuando los satélites GPS no pueden alcanzarles dentro de los edificios. La radio ultra‑ancha (UWB) se ha convertido en una candidata principal para esta tarea porque puede medir distancias con precisión de centímetros. Sin embargo, en espacios reales concurridos, llenos de paredes, cristales y personas en movimiento, esas señales de radio con frecuencia rebotan, se desvían o quedan temporalmente bloqueadas, provocando saltos repentinos en la posición informada. Este artículo explora un nuevo método basado en inteligencia artificial que hace que el posicionamiento UWB sea mucho más preciso y estable en esos entornos interiores complejos.
Pulsos de radio en una sala llena
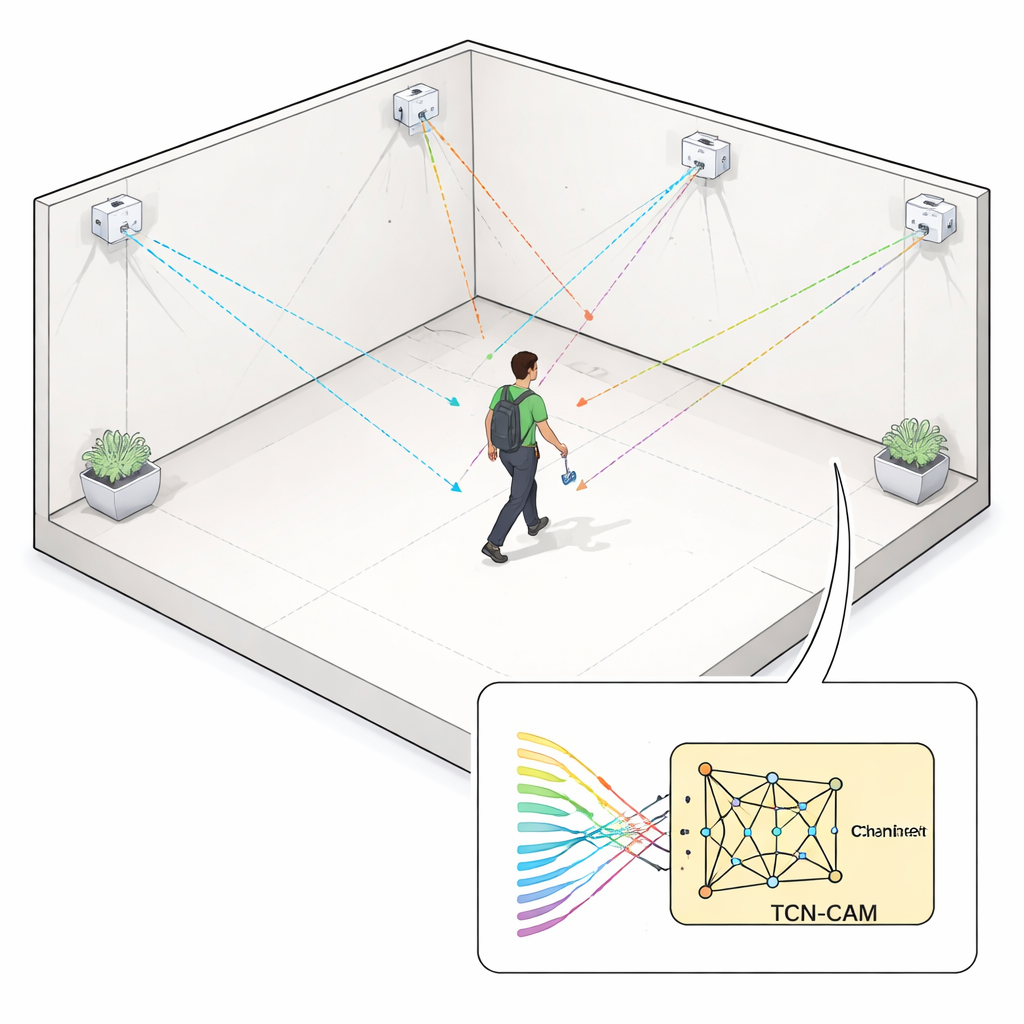
Los sistemas UWB localizan un dispositivo, llamado etiqueta, midiendo cuánto tiempo tardan en viajar pulsos de radio extremadamente cortos entre la etiqueta y varias estaciones base fijas. En espacios simples y abiertos este enfoque de “tiempo de llegada” funciona bien. Pero en interiores, las señales con frecuencia siguen trayectorias indirectas—rebotando en puertas, ventanas y personas—antes de alcanzar un receptor. Estas trayectorias no directas, o NLOS (por sus siglas en inglés), hacen que la etiqueta parezca más lejos de lo que realmente está. Las soluciones tradicionales se basan en filtros matemáticos cuidadosamente diseñados o en herramientas de aprendizaje automático que primero intentan etiquetar cada señal como limpia o distorsionada. Aunque útiles, estos métodos dependen en gran medida de ajustes expertos o siguen teniendo dificultades cuando las personas se mueven de forma impredecible por el espacio.
Dejar que los datos cuenten la historia a lo largo del tiempo
Los investigadores proponen una estrategia diferente: en lugar de tratar cada lectura de distancia de forma aislada, observan cómo cambian las lecturas a lo largo del tiempo y permiten que un modelo de aprendizaje profundo aprenda los patrones. Su herramienta central es una red convolucional temporal (TCN), un tipo de red neuronal diseñada para datos de series temporales. A diferencia de las redes recurrentes que procesan un instante tras otro, las TCN utilizan convoluciones unidimensionales que pueden examinar largos tramos de historial en paralelo. Este diseño evita problemas comunes de entrenamiento y permite al modelo detectar tendencias sutiles y a más largo plazo—como cuando una persona camina entre la etiqueta y una estación base, estirando temporalmente la distancia medida y luego permitiendo que vuelva a la normalidad.
Enseñar a la red a qué prestar atención
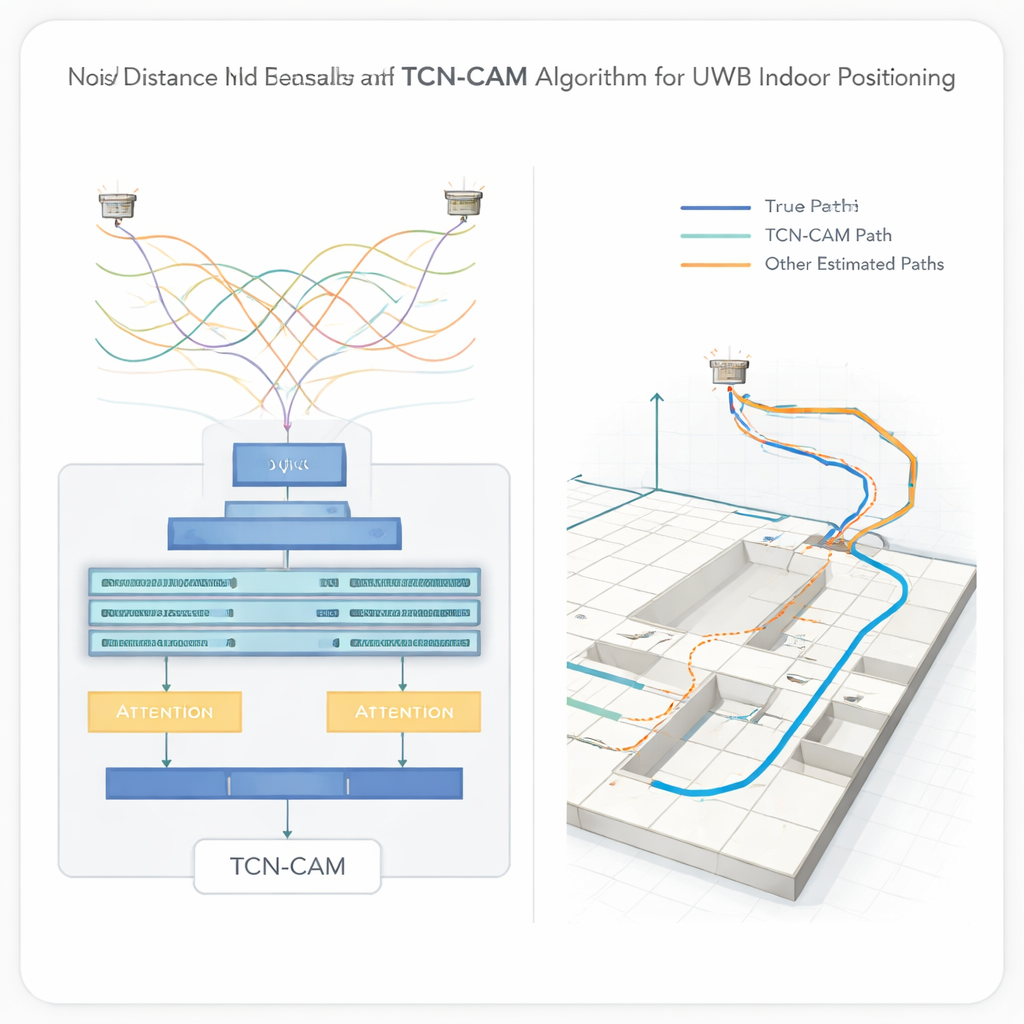
Sobre la TCN, el equipo añade un módulo de atención por canal (CAM). Cada estación base produce su propia secuencia de lecturas de distancia, y no todas son igual de fiables en todo momento. CAM aprende a asignar diferentes pesos a estas secuencias, reforzando las que parecen consistentes y relegando las que aparecen corrompidas por reflexiones o bloqueos. En conjunto, la red TCN‑CAM combinada toma distancias crudas y ruidosas de seis estaciones base y genera la mejor estimación de las coordenadas tridimensionales de la etiqueta, todo en un único paso de extremo a extremo sin una etapa separada de clasificación de señales.
Pruebas en ruido simulado y pasillos reales
Para evaluar el rendimiento del método, los autores crearon primero miles de posiciones interiores virtuales y simularon mediciones UWB con niveles variables de ruido añadido y errores NLOS. Compararon su enfoque TCN‑CAM con tres competidores: una red LSTM con atención, una TCN estándar y una red convolucional con atención por canal. A medida que la interferencia simulada aumentaba, los errores se incrementaron para todos los métodos, pero TCN‑CAM produjo consistentemente los errores más pequeños y la distribución más ajustada en los resultados, lo que indica una mayor precisión y una fiabilidad superior. En las condiciones de prueba más duras, redujo el error medio de posición en aproximadamente entre una cuarta y una mitad en comparación con los otros métodos.
Del laboratorio al movimiento en el mundo real
El equipo pasó luego a un sitio de prueba interior real equipado con seis estaciones base UWB, un instrumento topográfico de alta precisión y personas caminando para provocar deliberadamente bloqueos de señal. El nuevo algoritmo localizó la etiqueta en movimiento con un error medio de solo 3,32 centímetros. Eso supuso aproximadamente un 19% mejor que una TCN simple, un 25% mejor que el modelo convolucional con atención y un notable 76% mejor que el enfoque basado en LSTM. Los resultados de TCN‑CAM no solo se agrupan más estrechamente alrededor de la trayectoria real, sino que también siguen con mayor fidelidad la trayectoria tridimensional real de la etiqueta en todas las direcciones.
Qué significa esto para la tecnología cotidiana
Para los no especialistas, la conclusión es simple: permitiendo que un modelo inteligente observe cómo cambian las lecturas de distancia UWB a lo largo del tiempo y aprenda qué señales confiar en en cada momento, el posicionamiento en interiores puede volverse mucho más preciso y menos errático, incluso cuando las personas se mueven y bloquean la trayectoria de la radio. Aunque el método requiere reentrenamiento si se desplazan las estaciones base fijas, ofrece una solución práctica y potente para fábricas, hospitales, almacenes y edificios inteligentes donde la infraestructura permanece estable. A medida que técnicas similares de aprendizaje profundo maduren y comiencen a fusionar UWB con otros sensores, los dispositivos interiores de todo tipo podrían pronto conocer sus ubicaciones casi tan fiablemente como su teléfono lo hace en el exterior.
Cita: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Palabras clave: posicionamiento interior, ultra‑ancho de banda, aprendizaje profundo, análisis de series temporales, seguimiento de ubicación