Clear Sky Science · es
Seguimiento global dinámico para rastreo en línea multi-cámara y multi-vehículo
Por qué importan cámaras de tráfico más inteligentes
Cualquiera que haya quedado atrapado en un atasco o se haya preocupado por accidentes en la carretera ha sentido las limitaciones de los sistemas de tráfico actuales. Las ciudades modernas ya instalan redes de cámaras a lo largo de las autopistas y en las intersecciones para vigilar el tráfico en tiempo real. Pero lograr que estas cámaras funcionen juntas —seguir el mismo coche con fluidez de una cámara a otra— resulta sorprendentemente difícil. Este estudio presenta una nueva forma de rastrear vehículos a través de muchas cámaras a la vez, que promete una monitorización más rápida y fiable que podría hacer las carreteras más seguras y la gestión del tráfico más ágil.
El problema del rastreo de tráfico actual
Los sistemas tradicionales tratan cada cámara casi como un mundo aparte. Primero detectan vehículos en cada vídeo y luego construyen trayectorias cortas para cada coche dentro del campo de visión de una sola cámara. Sólo después de revisar largos tramos de vídeo grabado intentan “coser” estas trayectorias entre cámaras usando pesada agrupación de datos y reglas manuales sobre la disposición de las vías y la posición de las cámaras. Este enfoque offline y posterior es lento, consume mucha capacidad de cálculo y se ve superado cuando cambian las escenas de tráfico, se mueven las cámaras o se añaden nuevos puntos de vista. También tiene problemas cuando las cámaras muestran vehículos en tamaños y ángulos muy distintos, lo que puede hacer que el mismo coche parezca dos completamente diferentes.
Una nueva vía: rastrear todo en tiempo real
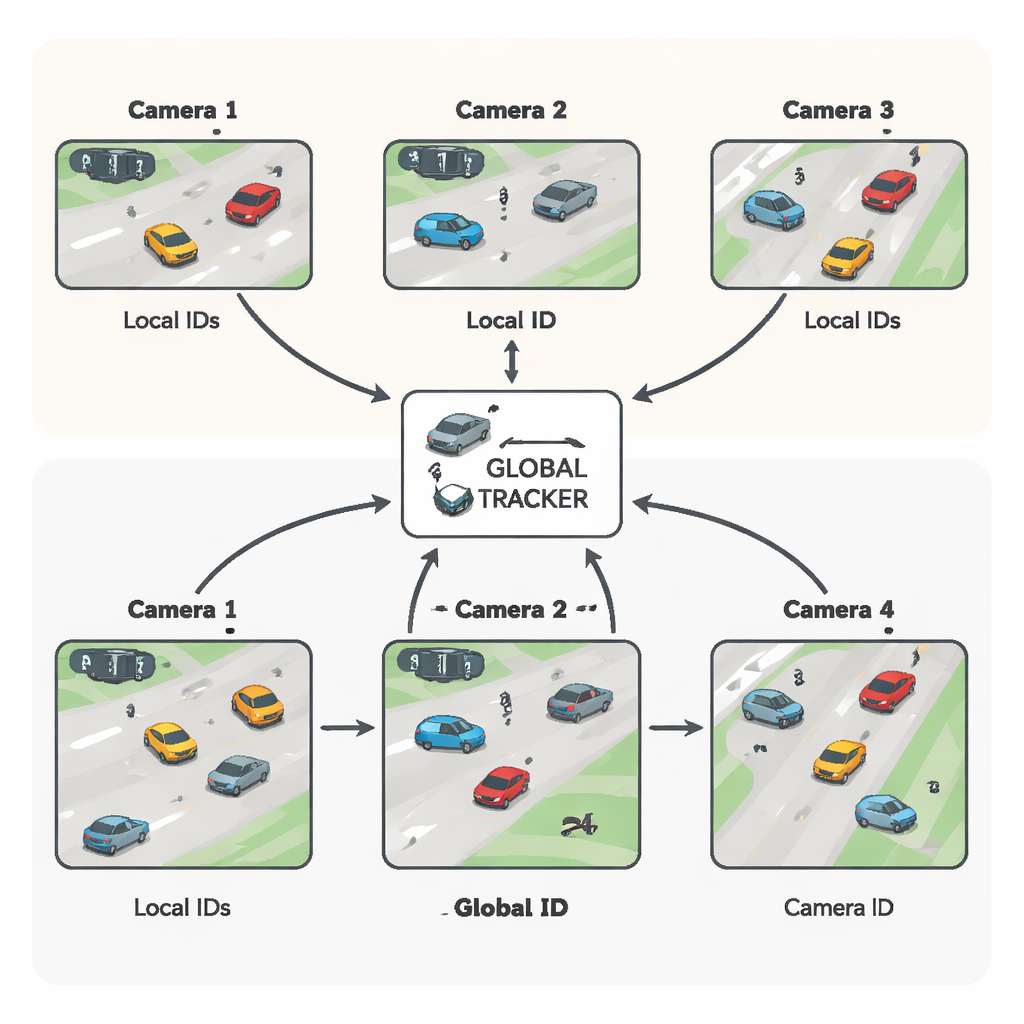
Los investigadores proponen un marco novedoso llamado Seguimiento Global Dinámico, o DGT, diseñado desde sus cimientos para uso en tiempo real. En lugar de esperar a que se recoja todo el vídeo y luego intentar vincular las trayectorias de los vehículos, DGT construye esos enlaces sobre la marcha. Cada cámara sigue detectando vehículos y generando trayectorias cortas dentro de su visión, pero en cuanto estas trayectorias se actualizan se comparan de inmediato con las de otras cámaras. Se emplea un algoritmo clásico de emparejamiento para decidir si dos trayectorias de distintas vistas pertenecen al mismo coche. Este proceso online, paso a paso, reemplaza la agregación masiva sobre todos los datos pasados, reduce el cómputo y hace posible seguir el ritmo del tráfico en vivo.
Ver el mismo coche desde distintos ángulos
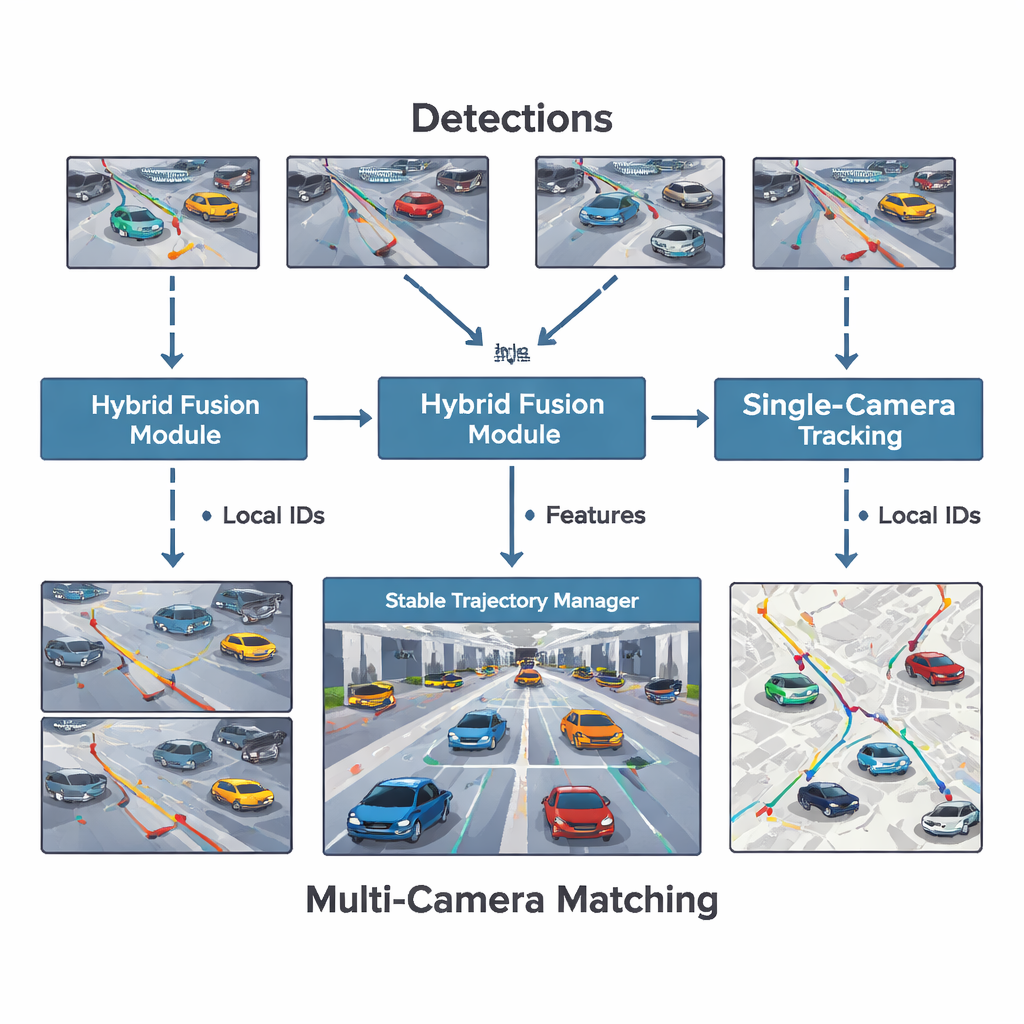
Un reto importante es que el mismo vehículo puede aparecer grande y detallado en una cámara y pequeño y borroso en otra, o iluminado de forma distinta en un túnel frente a una carretera abierta. Para afrontarlo, DGT incluye un Módulo de Fusión Híbrida que mezcla detalles finos y un contexto más amplio de cada imagen. Procesa los fotogramas de la cámara de dos maneras a la vez: una rama se centra en detalles nítidos a pequeña escala como bordes y texturas, mientras que la otra se concentra en patrones y contexto más globales. Luego el sistema combina ambas perspectivas en una única descripción estable de la apariencia del vehículo. Las pruebas muestran que este enfoque mantiene alta la confianza del sistema, incluso cuando el tamaño o la claridad del coche cambia drásticamente entre cámaras.
Mantener las trayectorias estables y fiables
DGT también introduce un Gestor de Trayectorias Estables, que actúa como un centro de control de calidad para las decisiones de rastreo. Filtra detecciones inciertas, gestiona cuánto tiempo un coche puede desaparecer detrás de otro vehículo u obstáculo antes de considerarse “ausente” y elimina objetos que no se mueven con el tiempo, como coches aparcados o barreras laterales. Umbrales de tiempo y movimiento seleccionados con cuidado permiten al sistema distinguir entre un coche que se oculta brevemente en un túnel y otro que realmente ha salido de la escena o se ha desplazado a otra cámara. En conjunto, estas reglas ayudan a mantener identificadores consistentes para cada vehículo, reduciendo saltos repentinos, pérdidas o fusiones erróneas entre trayectorias.
Qué significa esto para las carreteras de todos los días
En pruebas a gran escala tanto en un túnel de autopista en China como en una concurrida intersección urbana en Estados Unidos, DGT logró una alta precisión mientras funcionaba lo bastante rápido para uso en tiempo real. A diferencia de muchos sistemas anteriores afinados para un solo tipo de escena, DGT manejó vistas de cámaras superpuestas y no superpuestas sin necesitar entradas manuales detalladas sobre la disposición de las vías. Para conductores y residentes urbanos, este tipo de rastreo robusto y flexible significa que los centros de tráfico podrían reaccionar más rápido ante accidentes, congestión o comportamientos inusuales, usando una imagen más clara y continua de cómo se mueven los vehículos a través de la red de carreteras y cámaras.
Cita: Chen, X., Chan, S., Bin, G. et al. Dynamic global tracker for online multi camera multi vehicle tracking. Sci Rep 16, 6101 (2026). https://doi.org/10.1038/s41598-026-35768-z
Palabras clave: rastreo de vehículos multi-cámara, sistemas de transporte inteligentes, monitorización de tráfico en tiempo real, visión por computador, ciudades inteligentes