Clear Sky Science · es
YOLO11-WLBS: un modelo eficiente para la detección de defectos en pavimentos
Por qué importan mejores revisiones de las carreteras
Cada grieta y bache en la calzada es más que un problema estético: puede acortar la vida útil del pavimento, dañar vehículos y contribuir a accidentes. Hoy en día, muchas carreteras todavía se inspeccionan con personas que circulan despacio con portapapeles o cámaras simples, lo que consume tiempo, resulta caro y es fácil que falle. Este estudio presenta YOLO11‑WLBS, un sistema de visión por ordenador más inteligente y ligero que puede detectar distintos tipos de daños en tiempo real, incluso en un smartphone o un dron, prometiendo un mantenimiento más rápido y seguro de nuestras redes viarias.
De las patrullas lentas a las cámaras inteligentes
A medida que aumenta el tráfico y se expanden las redes viales, defectos como grietas transversales y longitudinales, grietas en forma de cocodrilo, grietas oblicuas, baches y reparaciones con parches se vuelven más comunes. La inspección tradicional —encuestas a pie o en vehículo, o procesamiento de imagen simple— depende en gran medida del juicio humano y tiene dificultades con poca iluminación o escenas con mucho ruido. En la última década, el aprendizaje profundo y, en particular, la familia de redes YOLO para detección de objetos, han transformado el análisis de imágenes aprendiendo patrones directamente de fotos sin procesar. Los sistemas anteriores basados en YOLO mejoraron la precisión pero seguían enfrentando un compromiso central: los modelos suficientemente precisos solían ser demasiado grandes y lentos para uso en tiempo real en drones, vehículos o dispositivos de mano.
Un motor ajustado sobre YOLO11
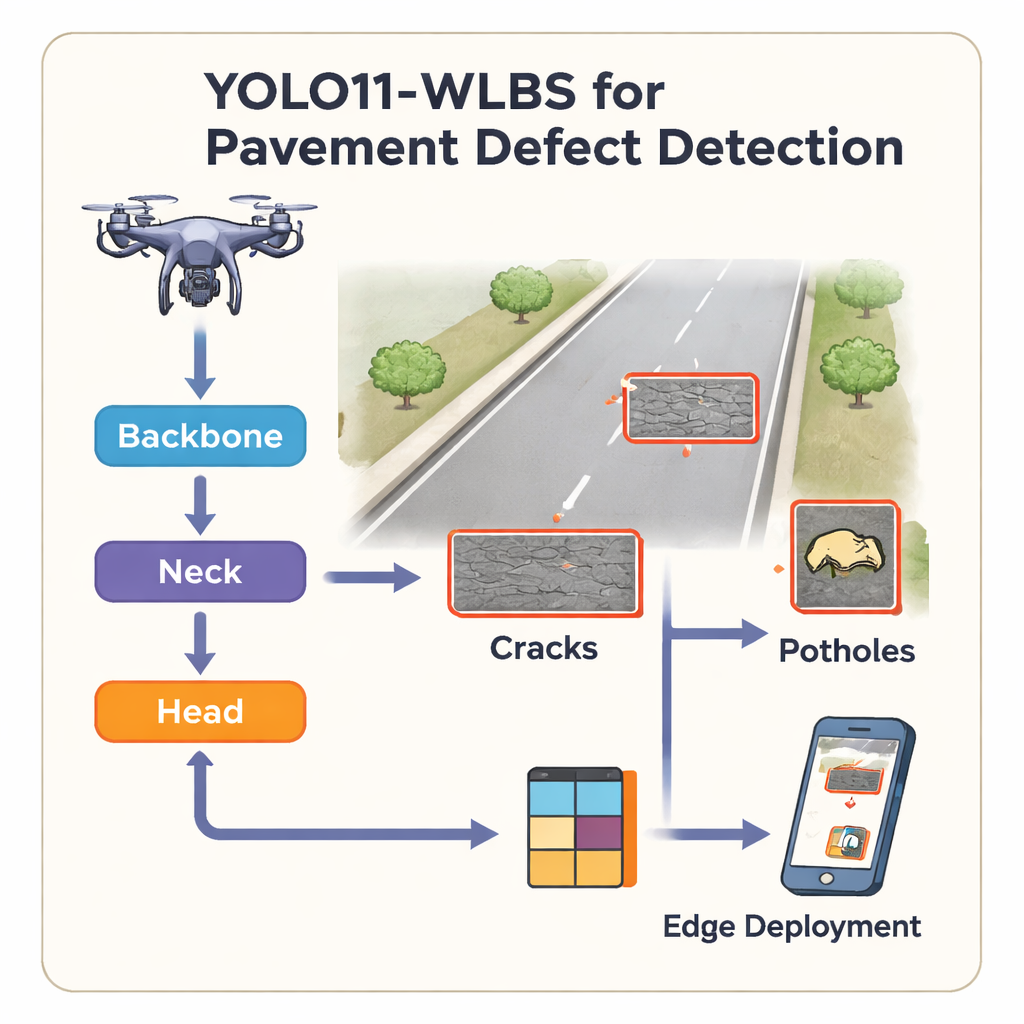
Los autores parten de YOLO11, una red moderna de detección de objetos que ya equilibra velocidad y precisión, y la adaptan a los retos específicos de las superficies viales. Su modelo mejorado, llamado YOLO11‑WLBS, mantiene el diseño habitual de tres etapas —"backbone" para extracción de características, "neck" para combinar información a diferentes escalas y "head" para dibujar cajas y etiquetas alrededor de los defectos— pero añade cuatro mejoras escogidas con cuidado. En conjunto, estas adiciones agudizan la visión del modelo para grietas finas, mejoran su manejo de múltiples tamaños de defecto y recortan cómputo innecesario para que pueda funcionar de manera eficiente en dispositivos edge.
Cuatro trucos inteligentes para ver grietas
La primera mejora usa convolución basada en wavelets para enfatizar detalles de alta frecuencia —los cambios bruscos de brillo que delinean grietas y pequeños orificios— sin inflar el modelo. Esto ayuda al sistema a detectar defectos tenues, finos o irregulares que los filtros estándar podrían pasar por alto. Después, un paso de "extracción adaptativa ligera" reorganiza los mapas de características para que la red concentre su esfuerzo en los canales más informativos mientras reduce el número total de parámetros en aproximadamente una cuarta parte. Una pirámide de características bidireccional permite entonces que la información fluya entre escalas gruesas y finas, mejorando el reconocimiento tanto de fisuras minúsculas como de patrones de grieta más grandes y conectados. Finalmente, un mecanismo de atención sencillo resalta las regiones más importantes en cada mapa de características, guiando al detector hacia los defectos reales y alejándolo de distracciones como marcas de carril, sombras o manchas.
Demostrando que funciona en el mundo real
Para evaluar YOLO11‑WLBS, el equipo lo entrenó y probó con imágenes de alta resolución tomadas por drones de pavimentos reales, cubriendo más de diez mil defectos etiquetados en seis categorías. En comparación con el YOLO11 original, el nuevo modelo aumenta la precisión de 0,853 a 0,947 y el recall de 0,698 a 0,895, lo que significa que genera menos falsas alarmas y pasa por alto muchos menos defectos. Su puntuación global de detección (mAP@0.5) sube un 12,2%, mientras que el número de parámetros se reduce en alrededor de un 25,5%. El sistema se mantiene preciso con iluminación baja y alta y cuando las imágenes están borrosas o muestreadas a una resolución menor, y se adapta bien a un conjunto de datos de drones independiente con puntos de vista distintos y menor resolución. Los autores incluso desplegaron una versión completamente cuantizada en un smartphone Android, alcanzando casi 30 fotogramas por segundo para detección en vídeo en vivo de múltiples tipos de grietas.
Qué significa esto para conductores y ciudades
En términos sencillos, YOLO11‑WLBS es un par de ojos más rápido y más preciso para nuestras carreteras. Al combinar mejor detección de bordes, uso más inteligente de la capacidad del modelo, fusión de características multiescala y atención ligera, encuentra más defectos mientras funciona en hardware modesto como drones y teléfonos. Esto hace práctico escanear tramos largos de pavimento con frecuencia, detectar problemas temprano y planificar reparaciones de forma más eficiente, todo sin enviar grandes equipos al tráfico. Aunque el modelo todavía presenta dificultades con defectos raros como baches —principalmente porque hay menos ejemplos para aprender—, ofrece una base sólida para futuros sistemas que no solo detecten dónde está dañado el pavimento sino que también estimen la gravedad del daño, orientando a las ciudades hacia un mantenimiento más seguro y rentable.
Cita: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Palabras clave: detección de defectos en pavimentos, detección de grietas en carreteras, YOLO11-WLBS, inspección con drones, IA en el borde