Clear Sky Science · es
Explorando las profundidades oceánicas: desvelando tesoros ocultos con IoT y un modelo híbrido profundo en ensamblaje
Por qué la exploración del lecho marino se está modernizando con alta tecnología
El océano profundo y el terreno que hay bajo él ocultan cables, tuberías, ruinas antiguas y ecosistemas frágiles. Sin embargo, el agua turbia, la arena en suspensión y las señales débiles hacen sorprendentemente difícil ver qué hay allí abajo. Este artículo describe una nueva forma de combinar muchos tipos de sensores con inteligencia artificial para que los robots submarinos y los sistemas de monitorización puedan detectar objetos importantes con mayor precisión, rapidez y menor consumo energético. El trabajo podría ayudar a proteger la vida marina, salvaguardar infraestructuras y abrir nuevas fronteras en la exploración.
Muchos sensores, una visión compartida de las profundidades
El equipamiento de detección submarina actual tiende a apoyarse en un solo sentido: un ping de sonar, una cámara de vídeo o un tipo de sensor del terreno. Cada uno funciona bien en condiciones ideales, pero fallan cuando el agua se enturbia, la luz disminuye o aparece ruido. Los investigadores, en cambio, imaginan el océano como un lugar vigilado por un Internet de las Cosas: pequeños dispositivos en red que escuchan, miran y sienten de distintas maneras. Su sistema fusiona datos de cámaras, radar de penetración en el suelo, sensores de vibración sísmica, sondas térmicas y detectores electromagnéticos en una única corriente compartida para su análisis. Al combinar estas perspectivas, el sistema puede reconocer un objeto incluso cuando un sensor se confunde por lodo, burbujas o reflejos. 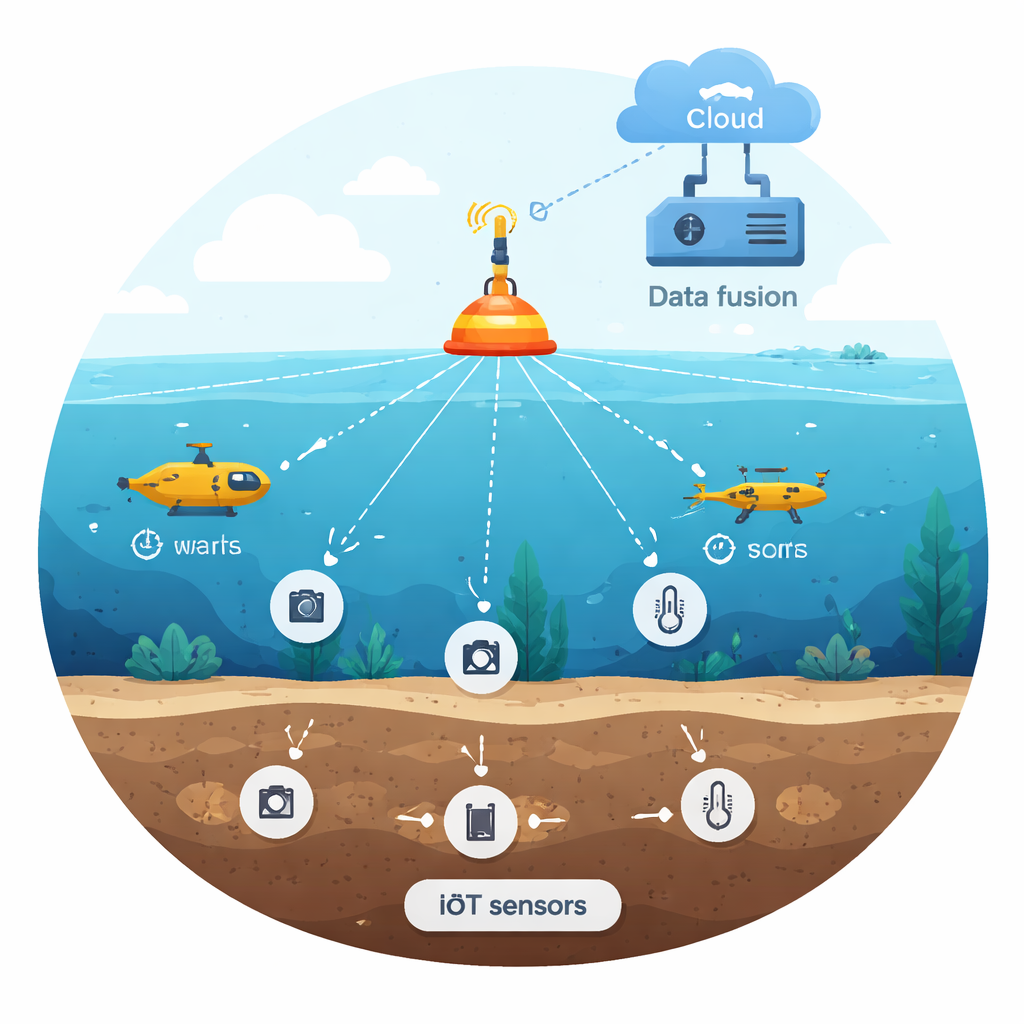
Limpiar señales desordenadas antes de que lleguen al «cerebro»
Los datos en bruto recogidos bajo el agua están lejos de ser perfectos. Están salpicados de picos aleatorios, huecos y lecturas extrañas provocadas por corrientes cambiantes, animales en movimiento e interferencias electrónicas. Antes de que cualquier algoritmo inteligente tome decisiones, los autores someten estos datos a una línea de limpieza cuidadosa. Utilizan filtros de mediana para suavizar ruidos súbitos sin difuminar características reales, comprobaciones estadísticas para detectar y eliminar valores atípicos, y sincronización para que las lecturas de distintos dispositivos coincidan en el tiempo. También reescalan los valores para que un sensor muy potente no ahogue a los más débiles, transforman trazas de radar unidimensionales en imágenes y emplean técnicas modernas para reducir cientos de mediciones a un conjunto más pequeño y con más información. Todo esto está diseñado para que el sistema de aprendizaje vea una imagen nítida en lugar de un borrón caótico.
Un motor de aprendizaje híbrido que percibe patrones y toma decisiones
En el núcleo del enfoque está lo que los autores llaman un modelo Ensembled Deep Hybrid Learning (EDHL). Tiene dos partes principales que juegan roles complementarios. Primero, una red neuronal profunda al estilo Inception actúa como los «ojos», escaneando imágenes de sensores a varias escalas a la vez para captar tanto detalles finos, como un cable, como formas mayores, como un afloramiento rocoso. A partir de esto produce descripciones numéricas ricas de cada escena. Segundo, un clasificador por gradient boosting actúa como el «comité de decisión». Construye muchos árboles de decisión pequeños que corrigen mutuamente sus errores, afinando gradualmente la respuesta correcta sobre qué objeto está presente. Un paso de selección de características escoge solo las señales más informativas, lo que reduce la memoria y acelera el sistema final sin desechar lo más importante. 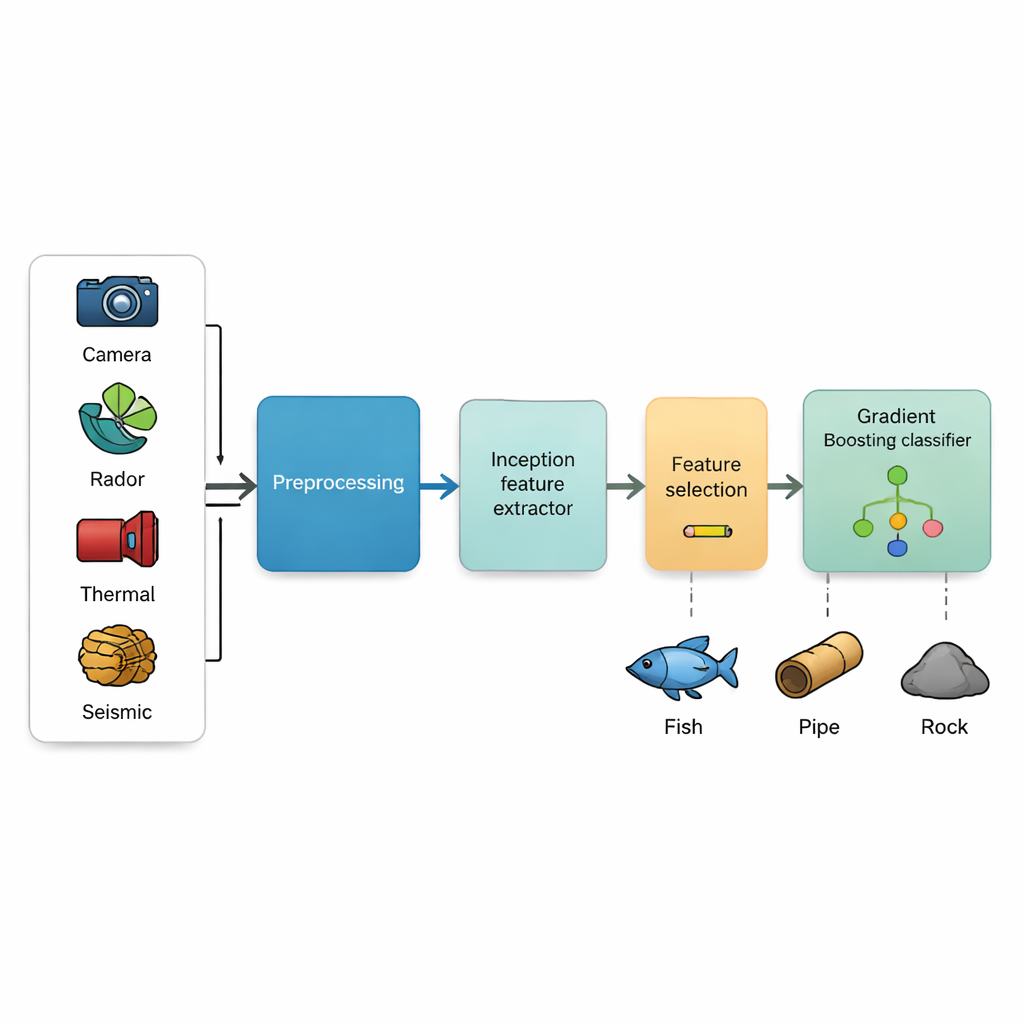
Poner el sistema a prueba
Para comprobar si su diseño funciona en la práctica, el equipo lo entrenó y evaluó usando una amplia colección pública de imágenes submarinas que incluye peces, coral, esponjas, algas, conchas, crustáceos y otras escenas del lecho marino. Compararon muchas variantes de limpieza de datos y selección de características, y enfrentaron su modelo a conocidos sistemas de aprendizaje profundo como redes convolucionales clásicas, ResNet, DenseNet, EfficientNet, redes de cápsulas e incluso modelos basados en transformadores. La configuración EDHL, especialmente cuando se combina con una eliminación cuidadosa del ruido y selección de características basada en correlación, alcanzó una precisión superior al 98%, con muchas menos falsas alarmas y objetos perdidos que sus rivales. Es importante que mantuvo este alto rendimiento ejecutándose en hardware modesto similar al que podría usarse en dispositivos edge, no solo en potentes servidores de laboratorio.
Qué significa esto para la futura exploración oceánica
Para el público no especializado, la conclusión es que los autores han construido un sistema más inteligente de «percibir y pensar» para el mundo submarino. Al unir sensores IoT diversos con un motor de aprendizaje híbrido, demuestran que es posible detectar y clasificar objetos del lecho marino de forma muy fiable sin necesitar equipos voluminosos ni condiciones de visualización perfectas. En el futuro, este tipo de tecnología podría ayudar a flotas de robots submarinos a cartografiar el fondo marino, monitorizar hábitats frágiles, rastrear la contaminación e inspeccionar infraestructuras enterradas con menos errores y menor consumo energético. Convierte el ambiente hostil y caótico de las profundidades en un lugar donde los sentidos digitales finalmente pueden ver con la claridad suficiente para desvelar sus tesoros ocultos.
Cita: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Palabras clave: detección de objetos submarinos, sensores IoT, aprendizaje profundo, exploración marina, detección multimodal