Clear Sky Science · es
Diseño e implementación del control de un brazo robótico de 6-DoF con detección de objetos basada en aprendizaje automático usando un microcontrolador mini
Brazos robóticos más inteligentes con menor presupuesto
Imagínese un brazo robótico de fábrica que pueda detectar un objeto, decidir cómo agarrarlo y moverse con suavidad hasta la posición correcta, todo ello sin depender de un ordenador voluminoso ni de una conexión en la nube. Este artículo describe exactamente eso: un brazo robótico de seis articulaciones (6-DoF) que ve y piensa usando un microcontrolador diminuto y de bajo coste. Para los lectores interesados en cómo la inteligencia artificial sale de los centros de datos y se integra en máquinas cotidianas, este trabajo muestra cómo visión y control avanzados pueden ejecutarse en hardware apenas más grande que una memoria USB.
Por qué importa reducir el tamaño del “cerebro” robótico
Los robots industriales tradicionales a menudo dependen de potentes ordenadores externos para reconocer objetos y planificar movimientos. Eso añade coste, cableado y complejidad técnica, lo que puede ser una barrera para pequeñas y medianas empresas. Los autores se propusieron demostrar que un único microcontrolador económico podría hacer casi todo: ver objetos, decidir dónde están en el espacio 3D, planificar cómo debe moverse el brazo y accionar los motores que ejecutan la tarea. Manteniendo el procesamiento a bordo, el sistema se vuelve más portátil, más eficiente energéticamente y más fácil de desplegar en entornos reducidos o cambiantes, desde pequeñas fábricas hasta laboratorios docentes.
Un brazo flexible que se construye por sí mismo
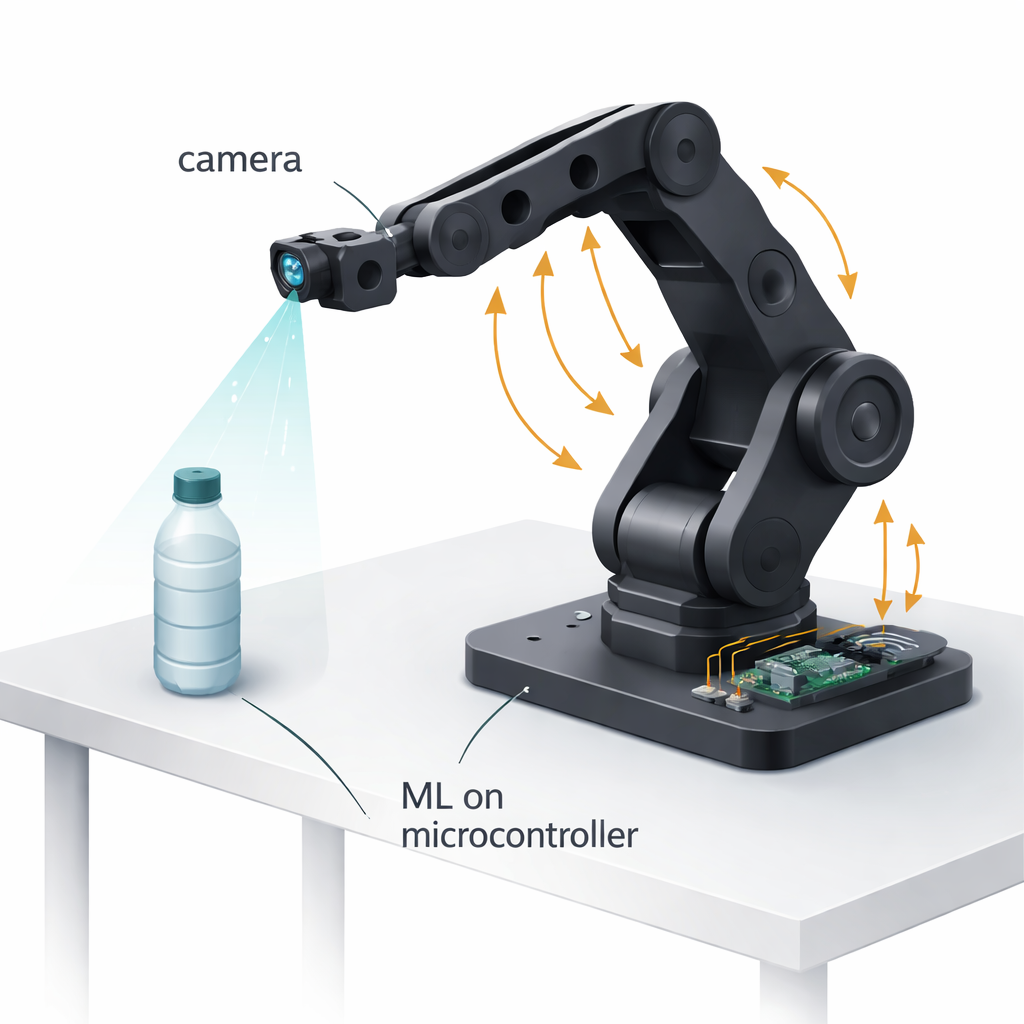
El equipo diseñó un brazo robótico de seis articulaciones desde cero usando principalmente piezas impresas en 3D para mantenerlo ligero y asequible. Motores servo de hobby de alto par mueven cada articulación, y los investigadores modificaron estos motores para leer sus ángulos exactos en tiempo real, lo que permite un control preciso en lazo cerrado. Un agarre de dos dedos personalizado en la punta incluye un sensor de corriente sencillo: observando cuánta corriente consume el motor del gripper, el sistema puede inferir la fuerza de sujeción y ajustar automáticamente el agarre para mantener los objetos firmes sin aplastarlos ni dejarlos caer. Montada en la “muñeca” del brazo hay una pequeña cámara full-HD que se mueve con el brazo, proporcionando al sistema una vista en primera persona de la escena frente al gripper.
Enseñar a un chip diminuto a ver botellas
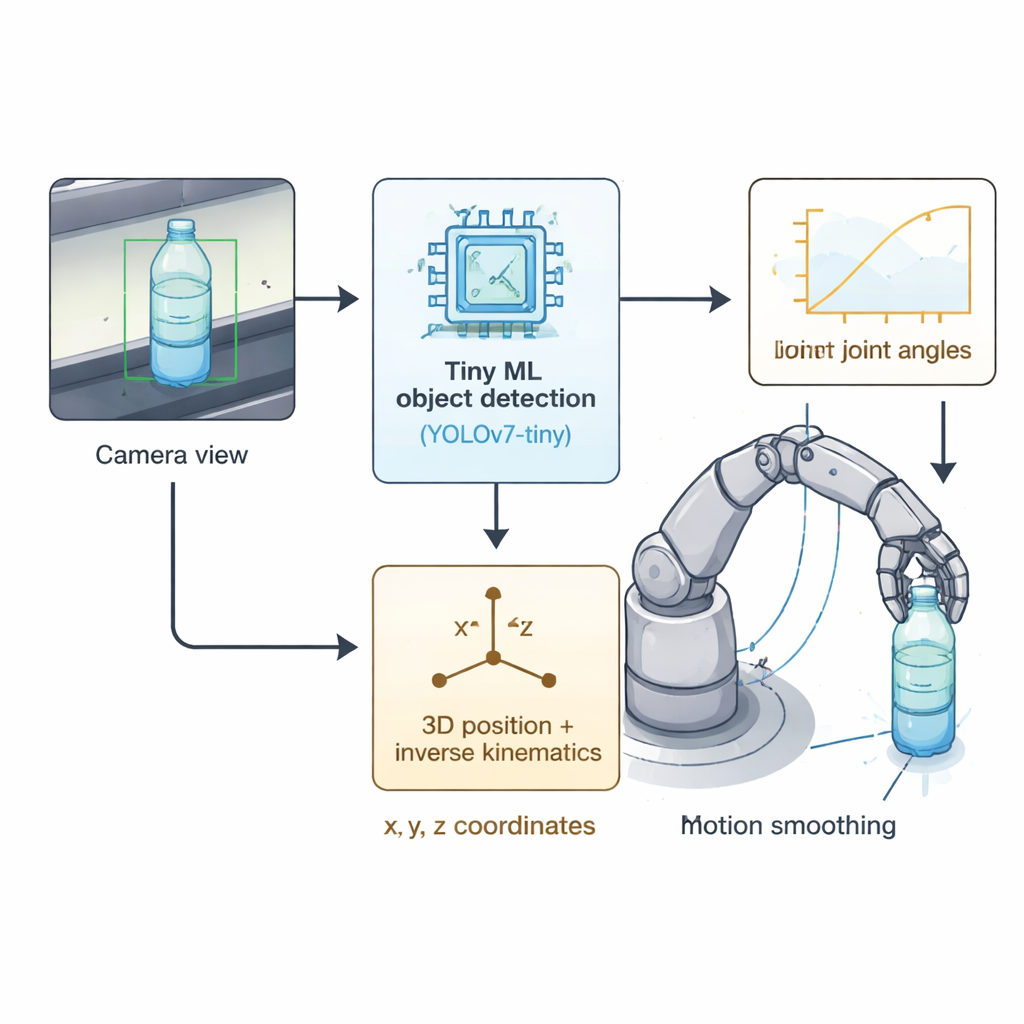
En el corazón de la visión del sistema está una versión compacta de una red de detección de objetos popular llamada YOLOv7-tiny. Los investigadores entrenaron este modelo con más de 2.500 imágenes de botellas de agua de plástico capturadas bajo una amplia variedad de ángulos de iluminación, distancias y oclusiones parciales. Tras el entrenamiento en una tarjeta gráfica potente, comprimieron el modelo a una forma de "tiny ML" de 8 bits para que pudiera encajar en la memoria y la capacidad de procesamiento limitadas del microcontrolador AMB82-Mini. Incluso en esta versión reducida, el modelo alcanzó aproximadamente un 88 % de precisión en la detección de botellas y funcionó lo suficientemente rápido —alrededor de 7–8 fotogramas por segundo— para trabajo de recogida y colocación en tiempo real directamente en el microcontrolador, sin ayuda de un PC ni de la nube.
De los píxeles al movimiento preciso
Una vez que la cámara detecta una botella, el sistema calcula el centro del recuadro de detección en la imagen y estima la distancia al objeto según el tamaño que ocupa en píxeles. Eso proporciona coordenadas x, y y z en el espacio. Un solucionador matemático personalizado traduce entonces esas coordenadas en los seis ángulos articulares que el brazo debe alcanzar, usando geometría robótica estándar pero optimizada para ejecutarse rápidamente en el diminuto procesador. El software de control, organizado como una máquina de estados simple, cicla por encontrar un objeto, moverse hacia él, cerrar el gripper usando el sensor de corriente como sensor de tacto y luego transportar el objeto hasta un punto de entrega fijo. Para mantener los movimientos suaves y evitar vibraciones, el equipo emplea curvas de “easing” cuidadosamente diseñadas y un método especial de modulación de voltaje que reduce el traqueteo del motor y el sobrepaso.
Pruebas en el mundo real y lo que demuestran
En experimentos repetidos, el sistema integrado demostró que podía recoger y colocar botellas de plástico de hasta 300 gramos con una tasa de éxito del 100 %, y seguir funcionando bien con cargas mayores hasta 500 gramos. Simulaciones y mediciones mostraron que los errores de posicionamiento eran típicamente del orden de un milímetro, lo suficientemente precisos para muchas tareas de clasificación y envasado. En comparación con esquemas de control más básicos, la estrategia de control de motores de los autores redujo la vibración, acortó el tiempo que el brazo tardaba en asentarse y eliminó comportamientos bruscos. Aunque las pruebas se centraron en un tipo de objeto y en distancias fijas en condiciones interiores controladas, proporcionan evidencia convincente de que una percepción y control robótico serios pueden integrarse en una única y muy modesta placa embebida.
Qué significa esto para la automatización cotidiana
Para el público no especializado, la conclusión principal es que las capacidades avanzadas de “ver” y “mover” ya no están limitadas a robots caros y de alta potencia. Combinando modelos de machine learning diminutos, geometría inteligente y un control de motores cuidadoso en un microcontrolador de bajo coste, este trabajo muestra una vía hacia brazos robóticos compactos y autónomos que fabricantes pequeños, escuelas y aficionados podrían adoptar de forma realista. A medida que versiones futuras se amplíen a más tipos de objetos y entornos más variados, sistemas embebidos similares podrían automatizar discretamente innumerables tareas simples de recogida y colocación, acercando la robótica inteligente a muchas más personas y lugares.
Cita: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Palabras clave: robótica embebida, tiny machine learning, control de brazo robótico, detección de objetos, automatización industrial