Clear Sky Science · es
Un novedoso esquema de control neuro-difuso adaptable y proporcional resonante adaptable para aplicaciones de vehículos eléctricos con PMSM
Viajes eléctricos más silenciosos y suaves
Los coches eléctricos ya son más limpios que los de gasolina, pero la manera en que se controlan sus motores aún admite mejoras. Los tirones repentinos al pisar el acelerador, el zumbido tenue del motor y la energía desperdiciada se remontan a lo rápido y suave que el motor puede responder a las cambiantes condiciones de la carretera y el tráfico. Este artículo explora una nueva forma de “conducir” el motor desde dentro —utilizando una combinación de inteligencia artificial y un tipo especial de conformado de señales— para lograr que los vehículos eléctricos aceleren con más suavidad, gasten menos energía y afronten mejor las perturbaciones del mundo real.
Por qué el control del motor importa en carreteras reales
Los coches eléctricos modernos suelen emplear motores de imán permanente porque son compactos, eficientes y ofrecen un par fuerte desde parado. Pero la conducción urbana es desordenada: los conductores arrancan y paran en los semáforos, sortean atascos y afrontan pendientes y cargas variables. En estas condiciones, la velocidad del motor puede sobrepasar o quedarse por detrás de lo que solicita el conductor, y el par aplicado al eje puede presentar rizado. Esos rizados se traducen en vibración, ruido y mayor estrés sobre engranajes y rodamientos. Los circuitos de control tradicionales, que dependen de ajustes fijos, funcionan bien solo en un rango estrecho de condiciones y pueden tener dificultades cuando cambian la carretera, la temperatura o la carga del vehículo.
Combinando aprendizaje y reglas para un mejor control de velocidad
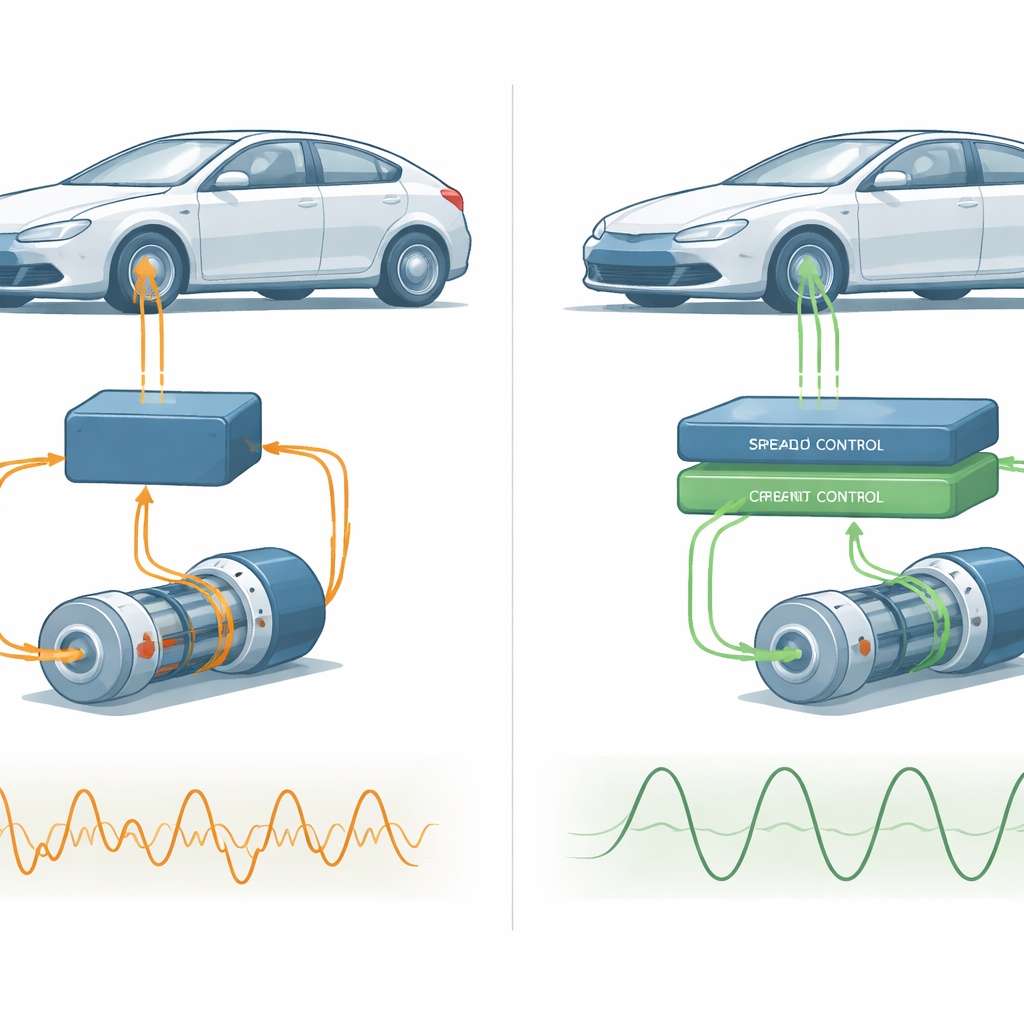
Los autores sustituyen el habitual bloque exterior de control de velocidad por un sistema neuro-difuso adaptable: un controlador que combina las reglas condicionales del lógica difusa con la capacidad de aprendizaje de las redes neuronales. En lugar de ajustarse manualmente una sola vez en la fábrica, este controlador aprende a partir de datos de ejemplo cómo responde la velocidad del motor a órdenes y perturbaciones. Traduce el error bruto de velocidad (la distancia entre la velocidad real y la deseada) y la rapidez con que cambia ese error en un conjunto de “opiniones” superpuestas, que luego mezcla para obtener una corrección precisa. Los resultados de entrenamiento y prueba muestran que este controlador aprendido encuentra rápidamente configuraciones que reducen las sobrepasadas y sobreejercicios, acortan el tiempo para alcanzar la velocidad objetivo y mantienen el comportamiento estable aun cuando el sistema es no lineal y sujeto a cambios.
Conformando la corriente para una operación más calmada y de bajo ruido
Mientras el lazo exterior decide a qué velocidad debe girar el motor, el lazo interior decide cuánta corriente eléctrica fluye por las bobinas en cada instante. Aquí, los autores introducen un controlador proporcional resonante adaptable. En lugar de reaccionar solo al tamaño del error, este controlador se sintoniza para prestar especial atención a las corrientes en la frecuencia alterna principal del motor, donde los rizados no deseados son más dañinos. Al elegir cuidadosamente unos pocos valores de ajuste clave, ofrece gran capacidad de corrección en esa frecuencia fundamental evitando inestabilidad en otras bandas. El resultado es una corriente que se aproxima mucho a una onda senoidal perfecta, con muchas menos oscilaciones abruptas que de otro modo aparecerían como rizado de par y zumbido audible.
Poniendo a prueba la nueva estrategia
El equipo evalúa su diseño en dos etapas —control de velocidad neuro-difuso en el lazo exterior y control resonante de corriente en el lazo interior— mediante simulaciones por ordenador detalladas y experimentos hardware-in-the-loop que imitan un tren motriz real de vehículo eléctrico. Lo comparan con tres métodos consolidados: un controlador proporcional–integral convencional, un esquema que combina ese controlador con un lazo interior resonante y un enfoque predictivo basado en modelo. A lo largo de una gama de escenarios —arranque desde reposo, funcionamiento estable bajo carga, cambios rápidos de velocidad a carga constante y cambios de carga bruscos a velocidad constante— el nuevo esquema alcanza consistentemente la velocidad objetivo más rápido, con picos y caídas menores. También produce un par más suave y corrientes más limpias, incluso cuando la resistencia e inductancia del motor se alteran artificialmente para imitar calentamiento o entornos severos.
Qué implica esto para los futuros coches eléctricos
En términos sencillos, esta estrategia de control híbrida permite que un motor eléctrico piense y se adapte en lugar de seguir ciegamente una receta fija. Al aprender a rechazar perturbaciones a nivel de velocidad y al esculpir las formas de onda de corriente dentro del motor, el enfoque reduce vibración, ruido y energía desperdiciada. Para los conductores, eso se traduce en aceleraciones más suaves, cruceros más estables y trenes de potencia que toleran mejor el envejecimiento de componentes y cambios climáticos. Aunque el método aún asume una frecuencia de operación fija en algunas partes, los resultados sugieren que añadir inteligencia y control con conciencia de frecuencia a los variadores de motor podría ser un paso clave hacia vehículos eléctricos más refinados, duraderos y eficientes.
Cita: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Palabras clave: motores de vehículos eléctricos, control neuro-difuso, motor síncrono de imán permanente, reducción de rizado de par, variadores de motor avanzados