Clear Sky Science · es
Control por modo deslizante difuso basado en el algoritmo super-twisting para sistemas descriptor T-S
Hacer que los sistemas complejos se comporten
Desde la gestión de poblaciones de peces hasta mantener la estabilidad de redes eléctricas y circuitos electrónicos, muchos sistemas reales se comportan de manera compleja y no lineal. Los ingenieros emplean algoritmos de control avanzados para mantener estos sistemas seguros y eficientes, incluso cuando reciben perturbaciones y hay incertidumbre. Este artículo presenta una nueva estrategia de control que doma estos sistemas indómitos con mayor suavidad, evitando el conmutado brusco que puede dañar el equipo y degradar el rendimiento.
Por qué algunos sistemas son difíciles de controlar
Muchos sistemas prácticos están gobernados no solo por ecuaciones que describen cómo cambian las magnitudes en el tiempo, sino también por restricciones algebraicas que deben cumplirse en cada instante. Estos llamados sistemas descriptor aparecen en economía, redes eléctricas, mecanismos y modelos biológicos. Para manejar su comportamiento no lineal, los investigadores suelen recurrir a modelos difusos de Takagi–Sugeno (T-S), que representan un sistema complejo como una mezcla de piezas lineales más simples válidas en diferentes regiones de operación. Aunque potentes, este marco ha sufrido durante mucho tiempo un escollo técnico: la mayoría de los métodos de control asumían conocimiento previo sobre cómo varían en el tiempo las funciones de pertenencia difusas, pese a que esos cambios dependen del comportamiento futuro desconocido del sistema y de su controlador.
Un tipo de control robusto más suave
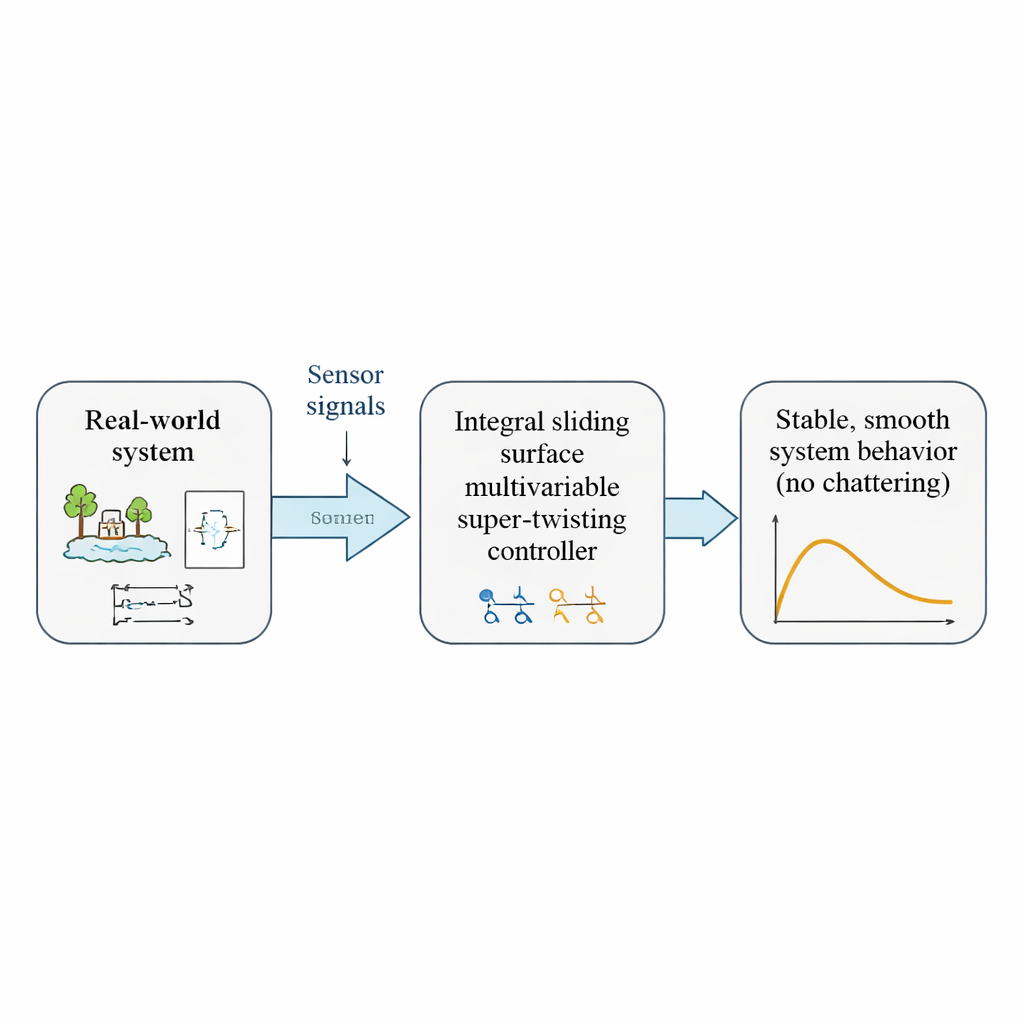
El control por modo deslizante es un método robusto popular, conocido por su capacidad de forzar rápidamente a un sistema a seguir una trayectoria deseada y mantenerlo allí pese a perturbaciones. Lo hace conmutando la entrada de control de manera que contrarreste la incertidumbre. Sin embargo, la conmutación rápida puede causar "chattering" —oscilaciones de alta frecuencia que son indeseables o incluso perjudiciales en sistemas mecánicos y eléctricos. El algoritmo super-twisting, una forma más avanzada del control por modo deslizante, oculta la conmutación dentro de un proceso interno, generando una señal de control continua que mantiene la robustez y reduce el chattering. Hasta ahora, esta técnica se restringía principalmente a sistemas de entrada única o requería descomponer sistemas multivariable en muchos controladores separados, lo que aumenta la carga computacional.
Una superficie de deslizamiento nueva sin supuestos ocultos
La primera contribución clave de los autores es un nuevo tipo de superficie de deslizamiento "integral" diseñada específicamente para sistemas descriptor T-S difusos. En términos simples, esta superficie es una condición matemática que involucra tanto el comportamiento presente como el acumulado en el tiempo del sistema. Construyéndola de forma ingeniosa, los autores muestran que pueden garantizar el movimiento deseado una vez que el sistema está sobre esa superficie, sin necesitar límites previos sobre cómo cambian las funciones de pertenencia difusas. Esto elimina un supuesto restrictivo que ha limitado métodos anteriores. El análisis utiliza funciones cuidadosamente elegidas, análogas a la energía, para demostrar que el comportamiento del sistema en la superficie de deslizamiento permanece estable con el tiempo.
Un controlador super-twisting multivariable
Partiendo de esta superficie de deslizamiento, el artículo desarrolla una versión multivariable del algoritmo super-twisting. En lugar de diseñar un controlador por entrada o por variable de deslizamiento, el método trata todas ellas conjuntamente en forma matricial. Esto lo hace más adecuado para sistemas donde los distintos estados están fuertemente acoplados, como especies que interactúan en un ecosistema o corrientes y tensiones en un circuito. Los autores derivan condiciones para elegir las ganancias del controlador de modo que los estados del sistema alcancen la superficie de deslizamiento de forma inmediata y, a continuación, converjan en tiempo finito. Dado que la señal de control es continua en lugar de conmutar bruscamente, el chattering se suprime por diseño, mientras se preserva la robustez frente a perturbaciones.
Demostración en biología y electrónica
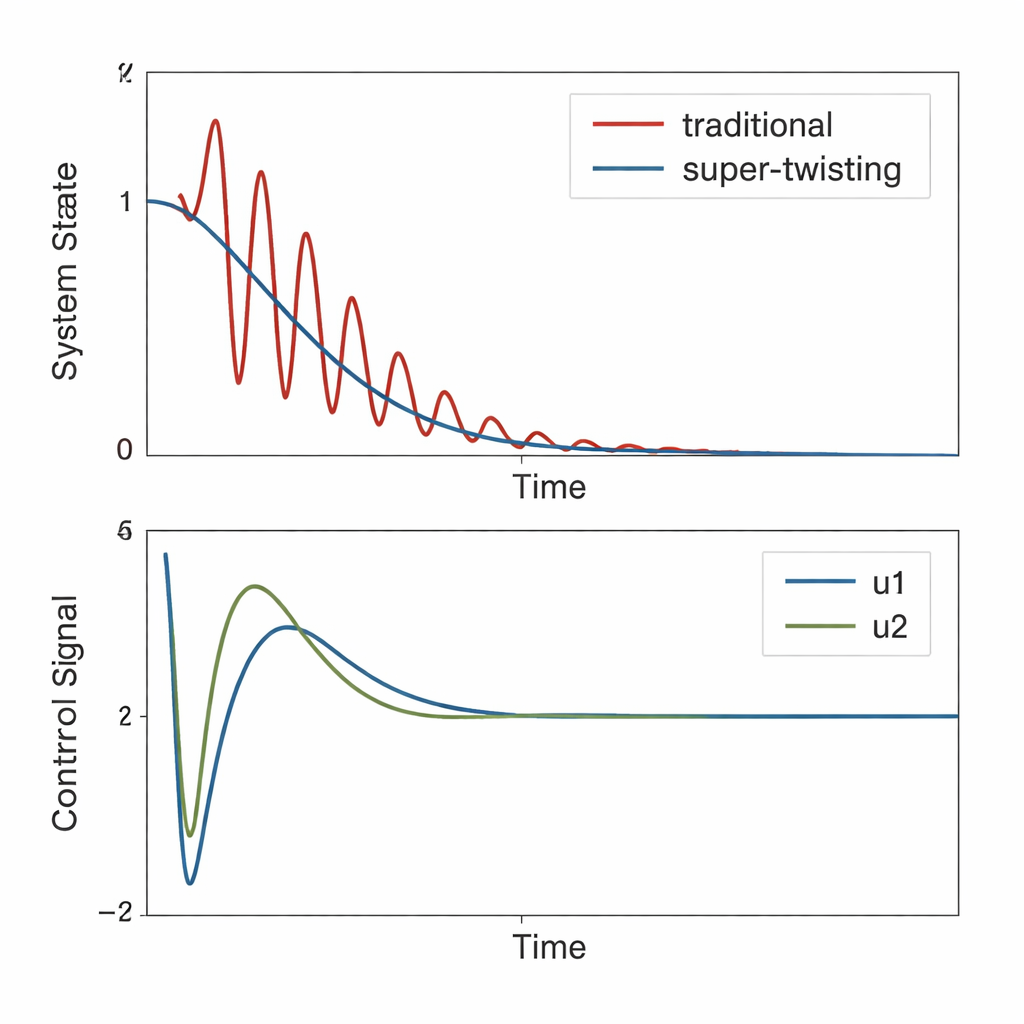
Para demostrar la aplicabilidad de su método, los autores lo aplican a dos sistemas descriptor no lineales diferentes. El primero modela un escenario bioeconómico que involucra poblaciones inmaduras y maduras de una especie, junto con una variable que captura la capacidad reproductiva y acciones de gestión como la pesca y la regulación. El segundo ejemplo es un circuito no lineal con diodo túnel, un banco de pruebas clásico en electrónica. En ambos casos, las simulaciones muestran que el controlador propuesto estabiliza rápidamente los estados del sistema y mantiene las variables de deslizamiento cerca de cero, indicando un seguimiento preciso del comportamiento deseado. En comparación con controladores de modo deslizante tradicionales, el nuevo enfoque reduce significativamente las oscilaciones tanto en la respuesta del sistema como en las señales de control.
Qué significa esto en la práctica
Para no especialistas, el mensaje principal es que este trabajo ofrece una forma de mantener bajo control sistemas complejos, con restricciones e incertidumbre, sin el conmutado violento que ha afectado a algunos métodos robustos. Al combinar modelado difuso, una superficie de deslizamiento integral y un algoritmo super-twisting multivariable, los autores diseñan controladores que están garantizados matemáticamente como estables y son operativamente más suaves. Esto podría beneficiar aplicaciones que van desde la gestión de recursos ecológicos hasta la electrónica de potencia avanzada y sistemas de control en red, especialmente conforme trabajos futuros extiendan estas ideas a entornos ciberseguros donde la comunicación puede verse interrumpida por ataques.
Cita: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Palabras clave: control por modo deslizante, sistemas difusos, control robusto, dinámica no lineal, algoritmo super-twisting