Clear Sky Science · es
Controlador adaptativo de referencia de modelo robusto para manipulador planar de 3 GDL
Brazos robóticos más inteligentes para trabajos más exigentes
Los brazos robóticos de fábrica son extremadamente rápidos y precisos, pero su rendimiento puede caer cuando el mundo real no coopera: las cargas cambian, las piezas se colocan ligeramente distinto o fuerzas inesperadas sacuden el brazo. Este artículo explora una nueva forma de mantener un brazo robótico de tres articulaciones común preciso y estable incluso cuando su comportamiento es difícil de modelar exactamente y cuando hay disturbios fuertes, haciendo a los robots compañeros más fiables en la planta.
Por qué tres articulaciones importan en fábricas reales
El estudio se centra en un robot planar de tres eslabones: tres segmentos rígidos unidos por juntas rotatorias que se mueven en un plano. Pese a su simplicidad, esta configuración es la base de muchas tareas industriales de pick-and-place, líneas de envasado y sistemas de montaje. El reto es que el movimiento de una articulación afecta fuertemente a las demás, y las ecuaciones que describen el movimiento del brazo son altamente no lineales y fuertemente acopladas. Los controladores tradicionales pueden funcionar bien cuando todo es conocido y predecible, pero fallan cuando cambia la carga útil, cuando la fricción o la masa no están modeladas con precisión, o cuando disturbios externos desvían el brazo de su curso.
Dividir un movimiento complejo en piezas más simples
Para domesticar esta complejidad, los autores derivan primero un modelo matemático detallado del movimiento del robot, incluyendo cómo las masas de los eslabones, los ángulos de las articulaciones y la gravedad combinan para producir movimiento. Luego introducen una simplificación clave: una estrategia de “desacoplamiento”. En lugar de tratar al robot como un sistema enredado de tres articulaciones, cada articulación se modela como si su aceleración dependiera principalmente de su propio par motor y velocidad. Los efectos residuales—como las interacciones entre articulaciones, los términos de gravedad y otras influencias difíciles de modelar—se agrupan y se tratan como incertidumbres. Este desacoplamiento permite dividir el problema de control en tres subsistemas más pequeños y manejables, uno por articulación, sin dejar de reconocer que el sistema real es complejo en su interior. 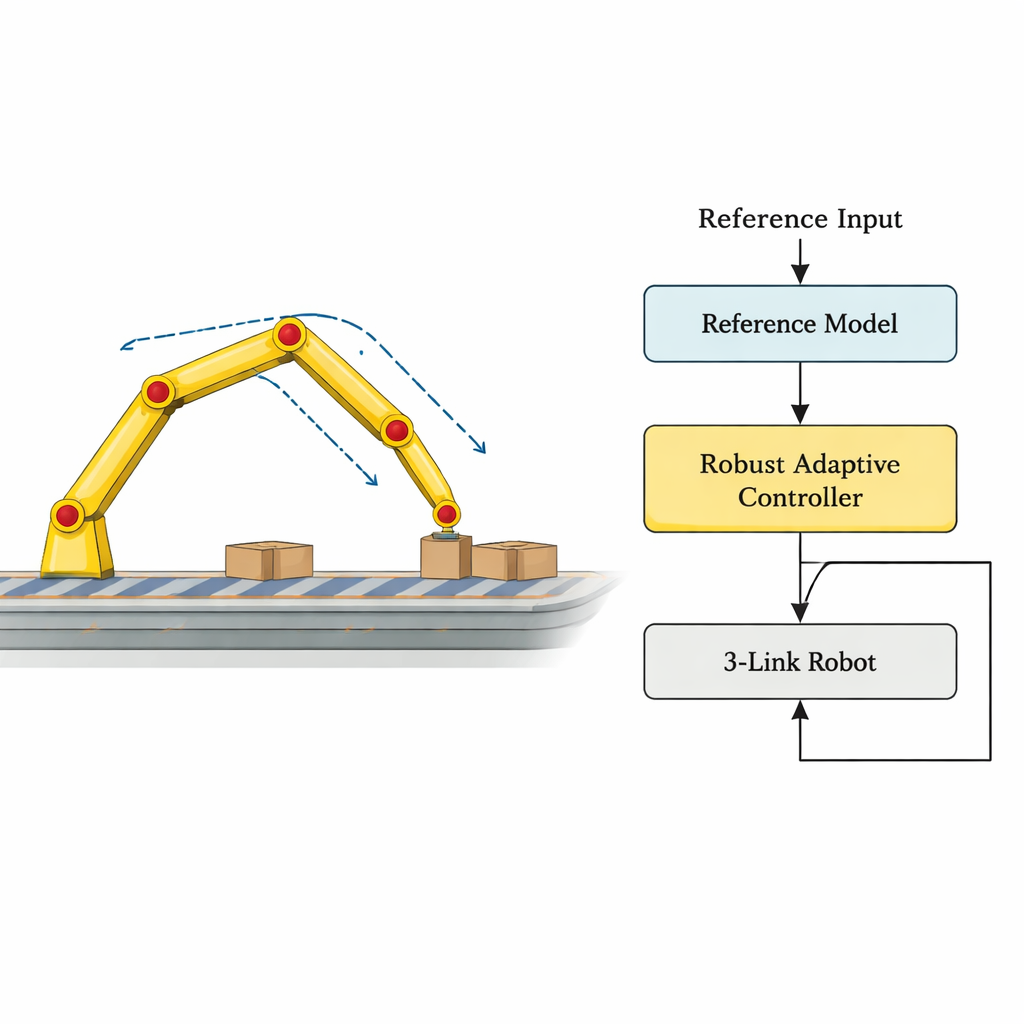
Enseñar al robot a seguir un objetivo en movimiento
Sobre este modelo simplificado, los autores construyen un controlador adaptativo de referencia de modelo (MRAC). En términos sencillos, primero definen una respuesta ideal—un modelo de referencia que indica cómo debería moverse cada articulación en el tiempo ante una orden. El controlador compara continuamente el movimiento real del robot con este ideal y ajusta sus ganancias internas en tiempo real para reducir la diferencia. En condiciones perfectas, un MRAC convencional puede hacer que el robot siga de cerca la referencia, pero tiene una debilidad seria: en presencia de disturbios persistentes o errores de modelado, las ganancias adaptativas pueden desviarse hacia valores extremos, provocando oscilaciones, gasto energético innecesario e incluso pérdida de estabilidad. Este fenómeno, llamado deriva de parámetros, hace que el MRAC simple sea arriesgado para uso industrial real.
Hacer la adaptación robusta, no imprudente
Para evitar esa deriva, el artículo desarrolla varias variantes “robustas” del MRAC que tienen en cuenta explícitamente efectos desconocidos. Los autores añaden términos adicionales a las leyes de adaptación que atraen suavemente las ganancias del controlador hacia límites seguros o escalan el esfuerzo de adaptación en función de la magnitud del error de seguimiento. Entre las estrategias probadas—conocidas como sigma-modificación, modificación por error y una modificación de control óptimo consciente de la energía—la última destaca. Mediante extensas simulaciones por ordenador, incluyendo trayectorias oscilatorias rápidas, movimientos de pick-and-place, cambios de masa del 50%, adiciones súbitas de carga y disturbios fuertes de alta frecuencia, el MRAC robusto mantiene el error de seguimiento bajo y las señales de control suaves. En escenarios donde las ganancias internas del MRAC convencional crecen sin límite, las versiones robustas las mantienen bien comportadas y el movimiento del brazo estable. 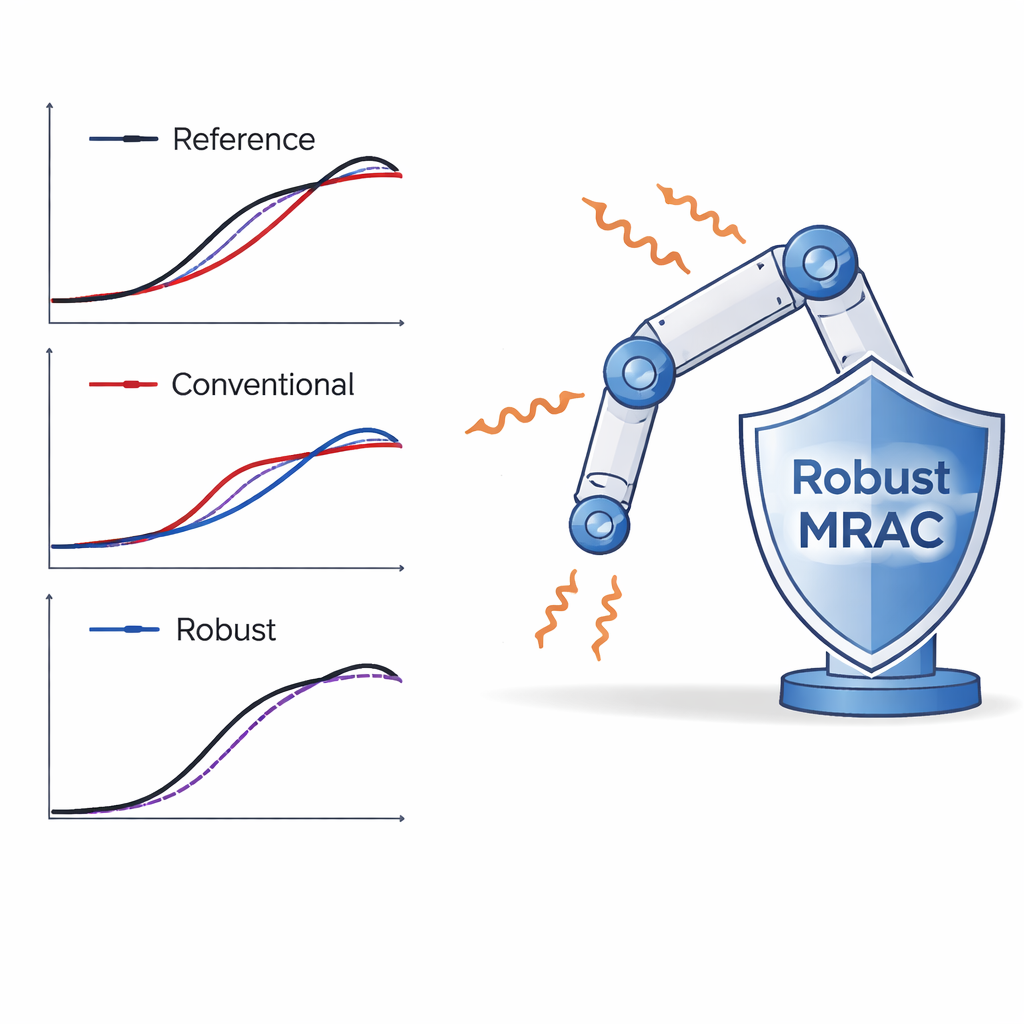
Qué significa esto para robots en el mundo real
Para un lector general, la conclusión es que este trabajo ofrece un “piloto automático” más inteligente para brazos robóticos industriales—uno que sigue aprendiendo y adaptándose, pero sin volverse inestable cuando cambian el entorno o la carga útil. Al dividir la dinámica compleja de tres articulaciones en piezas más simples y añadir salvaguardas al proceso de aprendizaje, el controlador adaptativo robusto propuesto permite que el robot siga trayectorias deseadas con precisión usando un esfuerzo motor razonable, incluso bajo disturbios e incertidumbre. Esto acerca la robótica práctica un paso más a sistemas verdaderamente plug-and-play que pueden reasignarse rápidamente, manejar condiciones inesperadas y operar con seguridad junto a humanos sin un retuneo constante por parte de expertos.
Cita: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Palabras clave: control de manipulador robot, control adaptativo, robótica industrial, seguimiento de trayectoria, control robusto