Clear Sky Science · es
Un algoritmo inteligente, bioinspirado, multiobjetivo y escalable de agrupamiento asistido por UAV en redes ad hoc voladoras
Enjambres de drones más inteligentes en el cielo
Imagínese flotas de drones que trabajan en conjunto para buscar supervivientes tras un terremoto, vigilar incendios forestales o supervisar cultivos. Para hacerlo bien, cientos de robots voladores deben comunicarse entre sí con rapidez sin agotar sus baterías. Este artículo explora cómo organizar esos “enjambres de drones” para que permanezcan conectados, reaccionen con rapidez y permanezcan más tiempo en el aire tomando ideas de una fuente inesperada: el comportamiento de caza del águila secretaria.
Por qué es difícil dominar las redes voladoras
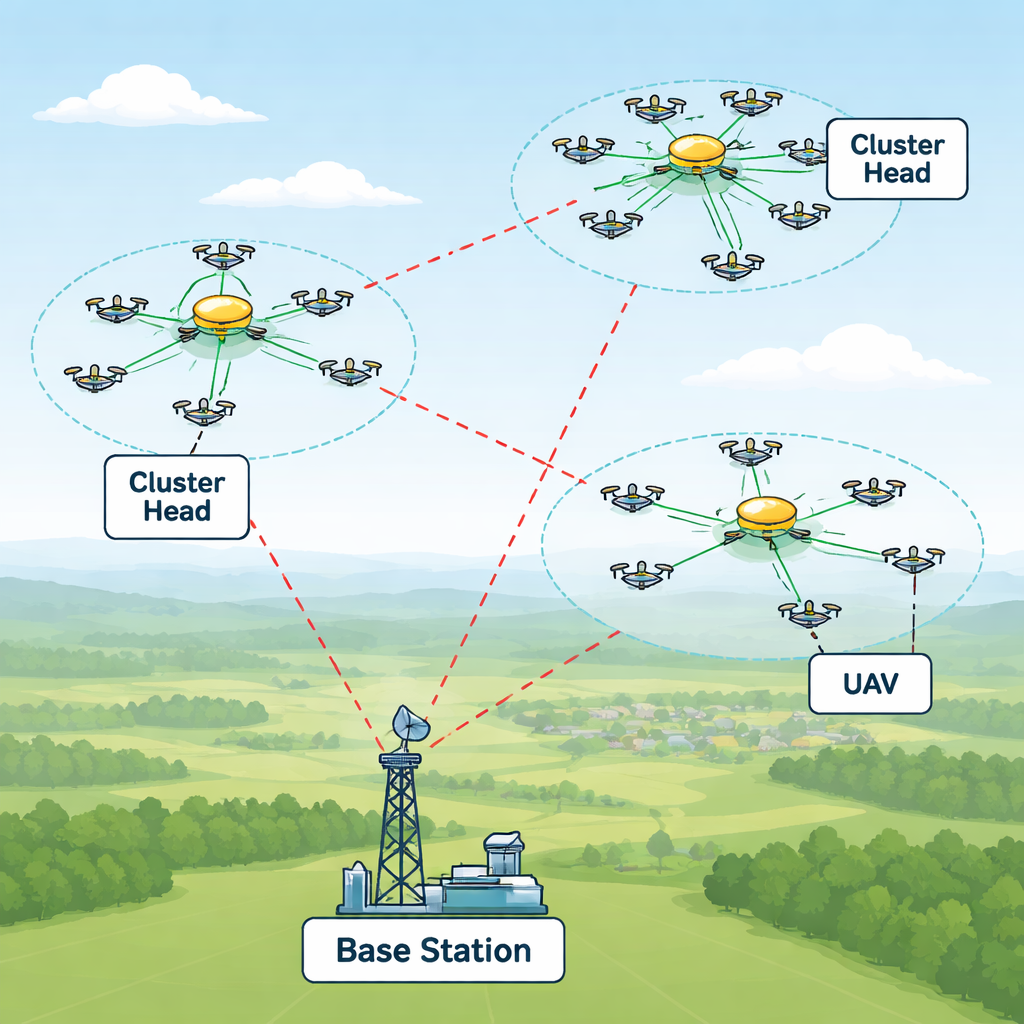
Los drones modernos pueden formar lo que los ingenieros llaman Redes Ad Hoc Voladoras, o FANETs: telarañas inalámbricas que existen solo en el cielo. A diferencia de las redes terrestres, estos drones se mueven en tres dimensiones, cambian de dirección con rapidez y dependen de baterías limitadas. Si cada dron intentara comunicarse directamente con todos los demás, las señales colisionarían, los retrasos aumentarían y las baterías se agotarían pronto. Una solución habitual es formar clústeres: pequeños grupos de drones dirigidos por una “cabeza de clúster” que coordina los mensajes locales y habla con otras cabezas. Pero elegir qué drones deben convertirse en líderes y cuándo redistribuir esos roles a medida que el enjambre se mueve es un rompecabezas en constante cambio.
Tomando trucos de un ave depredadora
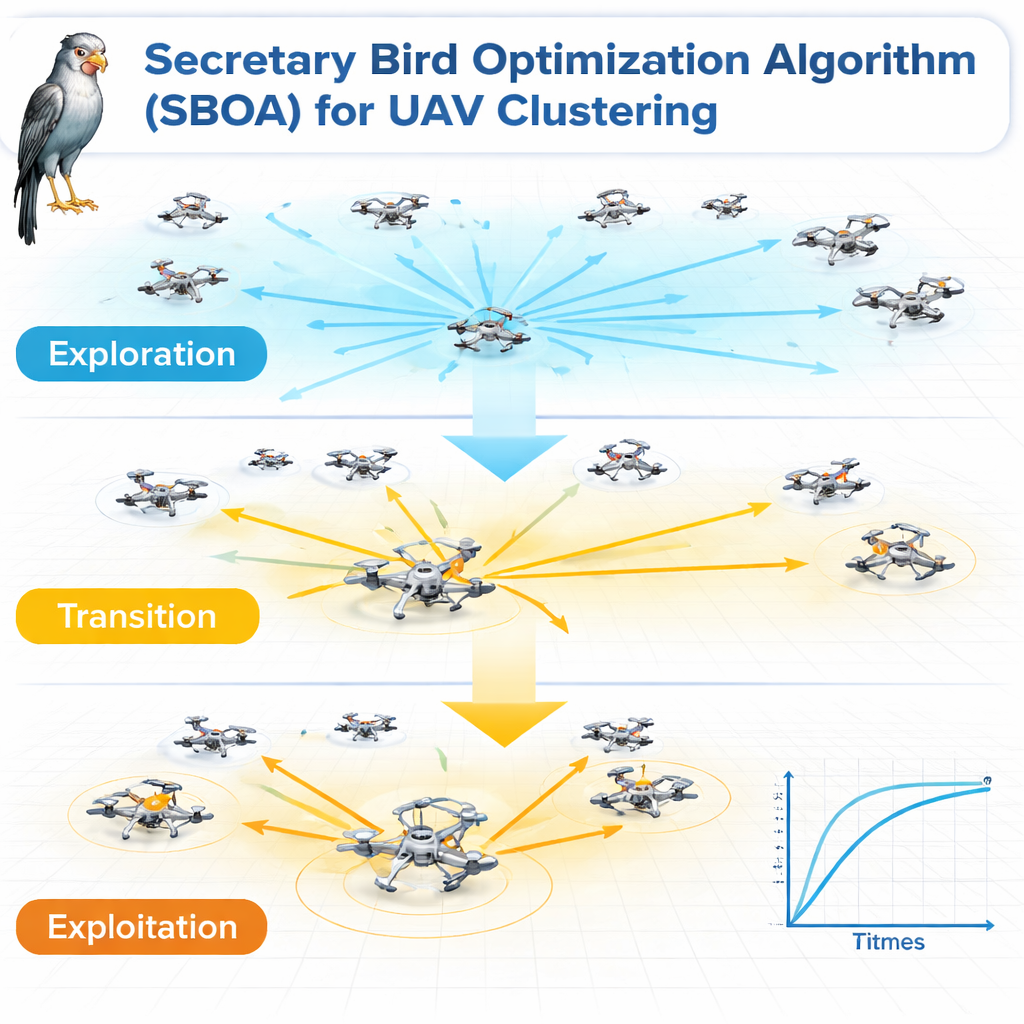
Los autores recurren a una idea bioinspirada llamada Algoritmo de Optimización del Águila Secretaria (SBOA). Las águilas secretarias son conocidas por escanear amplias áreas, acercarse y golpear a sus presas con patadas precisas. SBOA replica este patrón en software. Comienza explorando muchas formas posibles de asignar cabezas de clúster en todo el enjambre de drones y luego se centra gradualmente en las opciones más prometedoras. En cada paso plantea tres preguntas: ¿Están los drones dentro de cada clúster lo suficientemente cerca entre sí? ¿Tienen las líderes seleccionadas aún suficiente batería? ¿Se comparte la carga de trabajo de forma justa para que ninguna líder quede sobrecargada mientras otras están inactivas? Tratando esto como un problema multiobjetivo, el algoritmo equilibra distancia, energía y equidad simultáneamente.
Probando enjambres de drones en mundos virtuales
Para comprobar si esta estrategia inspirada en el ave ayuda, el equipo construyó simulaciones por ordenador detalladas. Dejaron caer entre 30 y 160 drones en espacios virtuales 3D de distintos tamaños, desde un kilómetro cuadrado hasta una caja extensa de 15 por 15 kilómetros, y les permitieron volar usando un modelo de movilidad simple. El rango de comunicación se varió entre 100 y 900 metros. Para cada escenario, SBOA compitió contra tres alternativas avanzadas que también imitan comportamientos naturales: Optimización Fire Hawk (FHOA), Optimización Portia Spider (PSOA) y un método multiobjetivo basado en fertilización de espermatozoides (MOSFP). Los investigadores siguieron cuántos clústeres se formaron, cuán rápido emergía una estructura estable, qué tan equitativamente se compartían las funciones de liderazgo y cuánta “aptitud” (fitness) alcanzaban las soluciones, combinando distancia, uso de energía y equilibrio en una sola puntuación.
Lo que revelaron las simulaciones
En casi todas las pruebas, SBOA salió adelante. Regularmente consiguió hasta un 15% más de aptitud que sus rivales, con alrededor de un 10% más de eficiencia en el agrupamiento y aproximadamente un 40% mejor equilibrio de carga entre las líderes. En experimentos basados en el tiempo, el enfoque del águila secretaria alcanzó un patrón de clúster estable en menos fotogramas de simulación, especialmente a medida que aumentaba el número de drones. Incluso en áreas 3D grandes y escasamente pobladas donde los drones están lejos entre sí, SBOA mantuvo más del 85% de la aptitud máxima alcanzable, lo que indica que puede adaptarse tanto a enjambres densos como a formaciones dispersas. Herramientas visuales como gráficos de superficie, mapas t-SNE y diagramas de violín confirmaron que SBOA produjo clústeres más compactos y definidos con menos variación en la carga de las líderes que los otros métodos.
De la simulación a las misiones reales
El estudio concluye que una estrategia inspirada en el águila secretaria ofrece una receta sólida para gestionar enjambres de drones: mantiene a los drones agrupados de forma eficiente, distribuye el trabajo con justicia entre las líderes y reacciona con suavidad a medida que cambian las condiciones. Para un lector no especializado, esto significa que futuras flotas de drones de rescate, agrícolas o de vigilancia podrían mantenerse conectadas por más tiempo, desperdiciar menos batería y responder con más fiabilidad, simplemente organizándose mejor. Los autores señalan que factores del mundo real —como rachas de viento, errores de GPS e interferencias de radio— aún necesitan ser probados, y proponen añadir predicción de movimiento basada en aprendizaje y enrutamiento más inteligente a continuación. Pero como paso hacia redes aéreas robustas, SBOA muestra que observar cómo caza la naturaleza en la sabana puede ayudar a que nuestros asistentes robóticos sean mucho más capaces en el cielo.
Cita: Aslam, Z., Rahman, T., Husnain, G. et al. An intelligent bio-inspired multi-objective and scalable UAV-assisted clustering algorithm in flying ad hoc networks. Sci Rep 16, 4870 (2026). https://doi.org/10.1038/s41598-026-35196-z
Palabras clave: enjambres de drones, comunicación inalámbrica, algoritmos bioinspirados, redes energéticamente eficientes, redes ad hoc voladoras