Clear Sky Science · es
Localización de puntos de crecimiento de plantas mediante recocido del prior por épocas
Deshierbe más inteligente para un mundo hambriento
A medida que la población mundial crece, los agricultores están presionados para producir más alimentos usando menos químicos y protegiendo el entorno. Un reto importante es eliminar las malas hierbas sin dañar los cultivos valiosos. Este artículo presenta una nueva estrategia de entrenamiento de inteligencia artificial (IA) que ayuda a las máquinas a localizar con precisión dónde brotan las plantas —sus puntos de crecimiento— para que herramientas como desherbadores por láser o eléctricos puedan atacar las malas hierbas con precisión quirúrgica y dejar los cultivos indemnes.
Por qué importan los puntos de crecimiento
Las malas hierbas roban luz solar, agua y nutrientes a los cultivos, reduciendo los rendimientos y amenazando la seguridad alimentaria. Los agricultores suelen recurrir a herbicidas, pero su uso excesivo plantea problemas de salud, contaminación y aparición de resistencias. Técnicas nuevas como el deshierbe por llama, electricidad o láser prometen un control más limpio destruyendo las plantas por medios mecánicos o con haces de energía. Para operar de forma segura, estos sistemas deben distinguir cultivos de malas hierbas y luego localizar los diminutos puntos de crecimiento —a menudo en las uniones del tallo— donde el daño es más eficaz. Muchos de los actuales instrumentos de visión por computador pueden detectar plantas enteras, pero les cuesta encontrar estos pequeños objetivos con la precisión y rapidez necesarias para su uso en tiempo real en el campo.
Convertir simples pistas de color en una guía poderosa
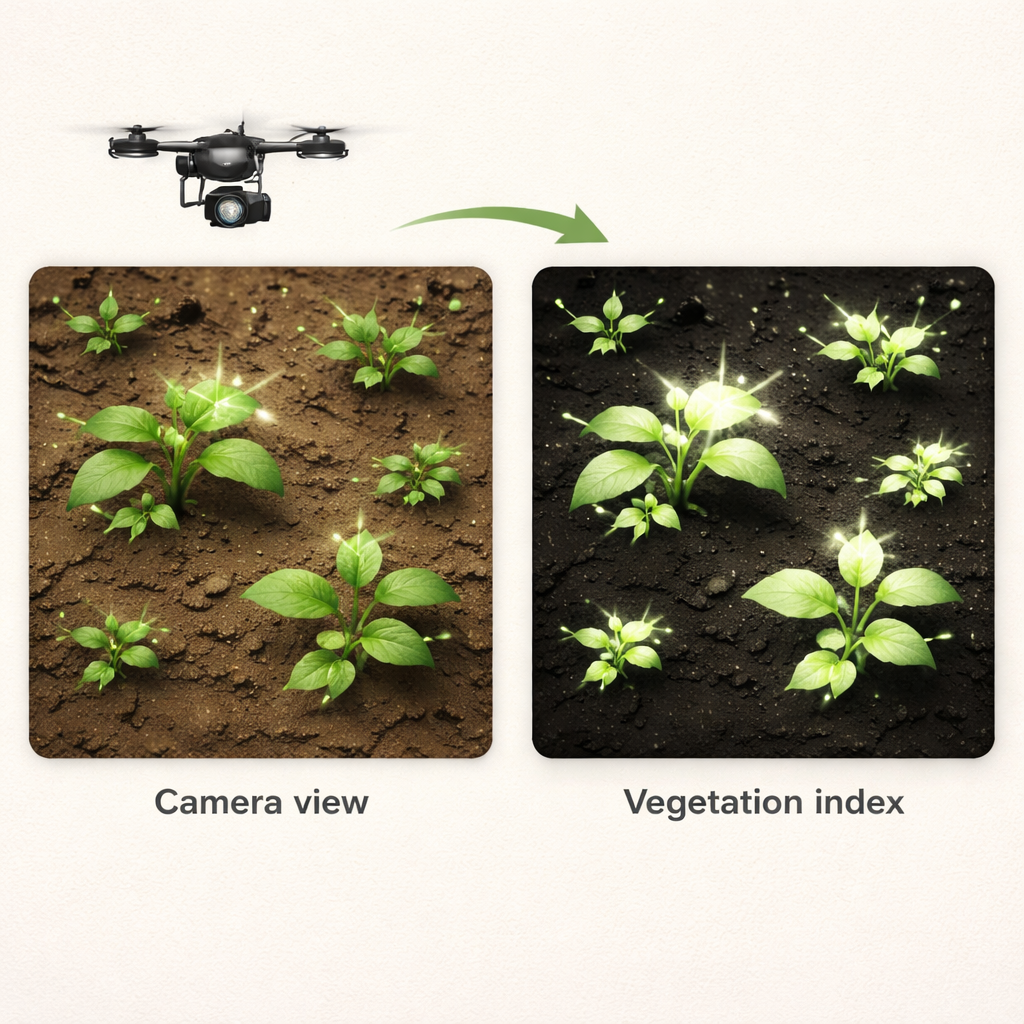
Los investigadores parten de una idea sencilla: las plantas verdes se ven distintas del suelo marrón en fotos a color normales. Una fórmula de color conocida, llamada índice de vegetación ExG-ExR, combina los valores rojo, verde y azul de cada píxel para que los píxeles de planta destaquen como brillantes y los del suelo aparezcan oscuros. Este índice puede calcularse con cualquier cámara estándar sin sensores extra. En el nuevo sistema, este índice de vegetación se añade a los habituales tres canales de color como una cuarta entrada a un detector de IA popular conocido como YOLO-Pose. Esta vista de cuatro canales le da al modelo una imagen más clara de dónde están las plantas, ayudándole a concentrarse en las áreas correctas cuando busca los puntos de crecimiento.
Enseñar a la IA de lo fácil a lo difícil
Proporcionar información adicional no es suficiente; el modelo también debe aprender a usarla. El equipo introduce una estrategia llamada "recocido del prior por épocas" (EPA), inspirada en cómo aprenden los humanos. Al inicio del entrenamiento, se anima al modelo con fuerza a mantener sus puntos de crecimiento predichos dentro de las regiones vegetales, usando el índice de vegetación como guía. Si sitúa un punto en el suelo, el algoritmo de entrenamiento impone una penalización mayor; si el punto cae dentro de píxeles de planta, la penalización es menor. A medida que avanza el entrenamiento, esta orientación se reduce gradualmente siguiendo un calendario suave, permitiendo que el modelo dependa menos de la pista de color ruda y más de los patrones visuales finos que ha aprendido. Al final, la IA ya no se ve forzada hacia los píxeles más verdes, que podrían no ser los verdaderos puntos de crecimiento, sino que afina sus ubicaciones por sí misma.
Demostrar la idea en campos reales
Para probar su enfoque, los autores entrenaron modelos en dos conjuntos de datos del mundo real que contienen miles de imágenes de campo con múltiples especies de cultivo y muchos tipos de malas hierbas. Compararon versiones del modelo YOLO-Pose con y sin el canal de vegetación adicional y la estrategia EPA. Añadir solo el índice de vegetación aportó mejoras moderadas, pero combinarlo con EPA produjo mejoras claras en la precisión de localización de puntos de crecimiento —alrededor de 2,4 puntos porcentuales en una métrica estándar de detección— sin perjudicar la capacidad del modelo para dibujar cajas alrededor de plantas completas. El coste computacional extra fue diminuto (menos de medio por ciento del coste total), lo que hace el método adecuado para robots agrícolas con recursos limitados. Pruebas bajo diferentes condiciones de iluminación, humedad del suelo e incluso distintas versiones de modelos YOLO mostraron que la estrategia es de utilidad general, aunque algo sensible a la intensidad y duración con que se aplica la guía previa.
Qué significa esto para la agricultura del futuro
Para el público general, la conclusión clave es que un pequeño ajuste en cómo entrenamos la IA —usar primero una pista sencilla basada en color y luego dejar gradualmente que el modelo aprenda por sí mismo— puede hacer que las máquinas sean mucho mejores localizando los puntos exactos de las plantas donde importa actuar. Esta mejora en la localización de puntos de crecimiento podría ayudar a futuros robots desherbadores a dirigir pulsos eléctricos o haces láser con precisión sobre las malas hierbas mientras respetan los cultivos, reduciendo el uso de herbicidas y el impacto ambiental. La misma estrategia podría adaptarse a otros tipos de señales vegetales y modelos de IA, abriendo la puerta a sistemas de visión más inteligentes y fiables que respalden una agricultura sostenible y de alta precisión.
Cita: Ma, C., Zhang, Z., Tian, F. et al. Plant growth point localization via epoch-based prior annealing. Sci Rep 16, 4994 (2026). https://doi.org/10.1038/s41598-026-35009-3
Palabras clave: agricultura de precisión, control de malas hierbas, visión por ordenador, aprendizaje profundo, puntos de crecimiento de plantas