Clear Sky Science · es
IA explicable con EDA para la predicción de pérdida de trayectoria V2I
Por qué importan enlaces coche-carretera más inteligentes
Los automóviles modernos se comunican cada vez más con la carretera que los rodea, enviando y recibiendo mensajes inalámbricos a semáforos, unidades en el arcén y otra infraestructura. Estos enlaces ayudan con avisos de seguridad, gestión del tráfico y, en el futuro, la conducción autónoma. Pero las calles de la ciudad son entornos inalámbricos complejos: edificios altos, árboles, puentes y camiones pueden debilitar o bloquear la señal. Este artículo muestra cómo predecir ese debilitamiento de la señal de una manera que no solo sea precisa, sino también comprensible para ingenieros y reguladores que deben confiar en estos sistemas.
Ver los datos antes de confiar en el modelo
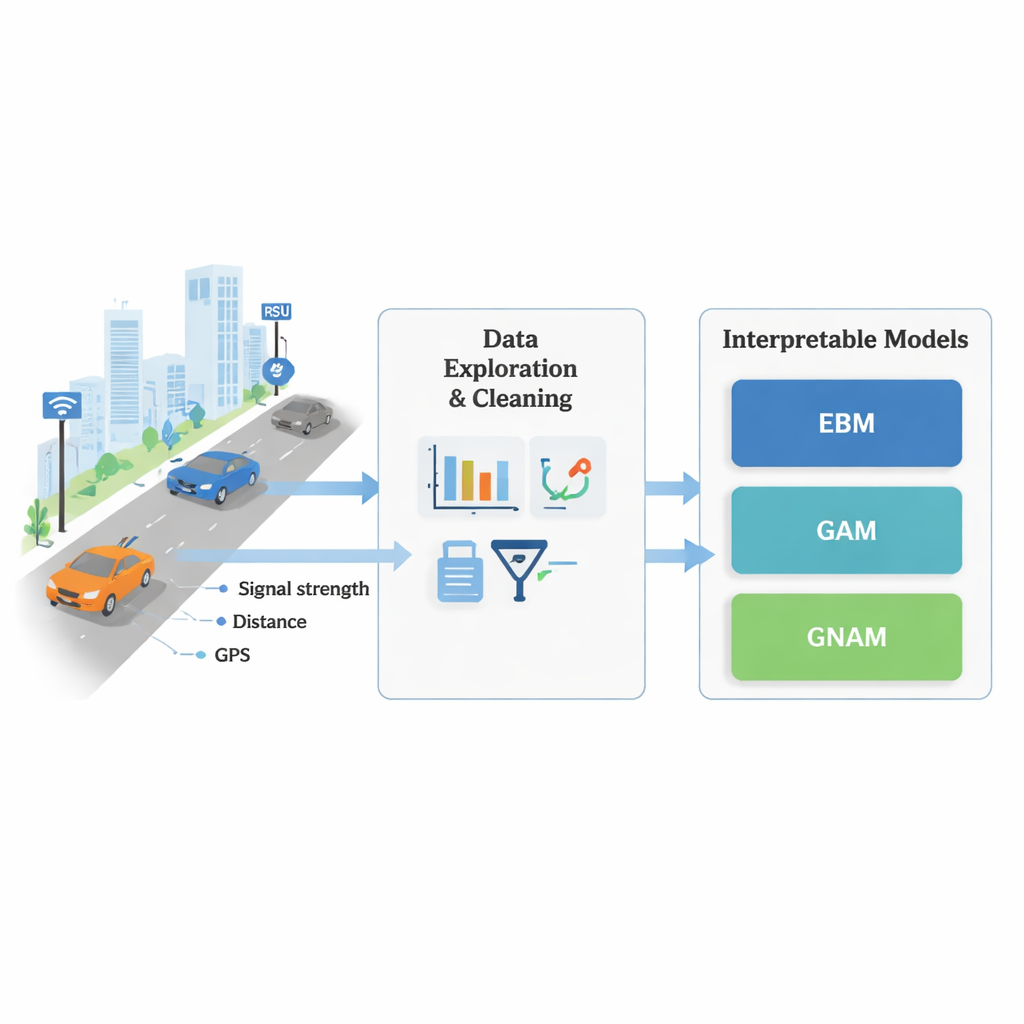
Los autores parten de una amplia campaña de mediciones en Bolonia, Italia, donde coches equipados con antenas circularon por 24 escenarios urbanos distintos—calles rectas, rotondas, avenidas arboladas, puentes y zonas de tráfico intenso—mientras se comunicaban con transmisores en el arcén. A partir de estas mediciones derivan la “pérdida de trayectoria”, una medida de cuánto se atenúa la señal al viajar desde la vía hasta el coche. Antes de construir cualquier modelo predictivo, realizan un meticuloso análisis exploratorio de datos: trazan distribuciones, revisan correlaciones y dividen los datos en siete estudios de caso representativos, como visibilidad despejada, vistas bloqueadas y vegetación. Este paso revela ruido, valores atípicos y patrones ocultos que deben abordarse para lograr predicciones confiables.
Limpiando el caos inalámbrico del mundo real
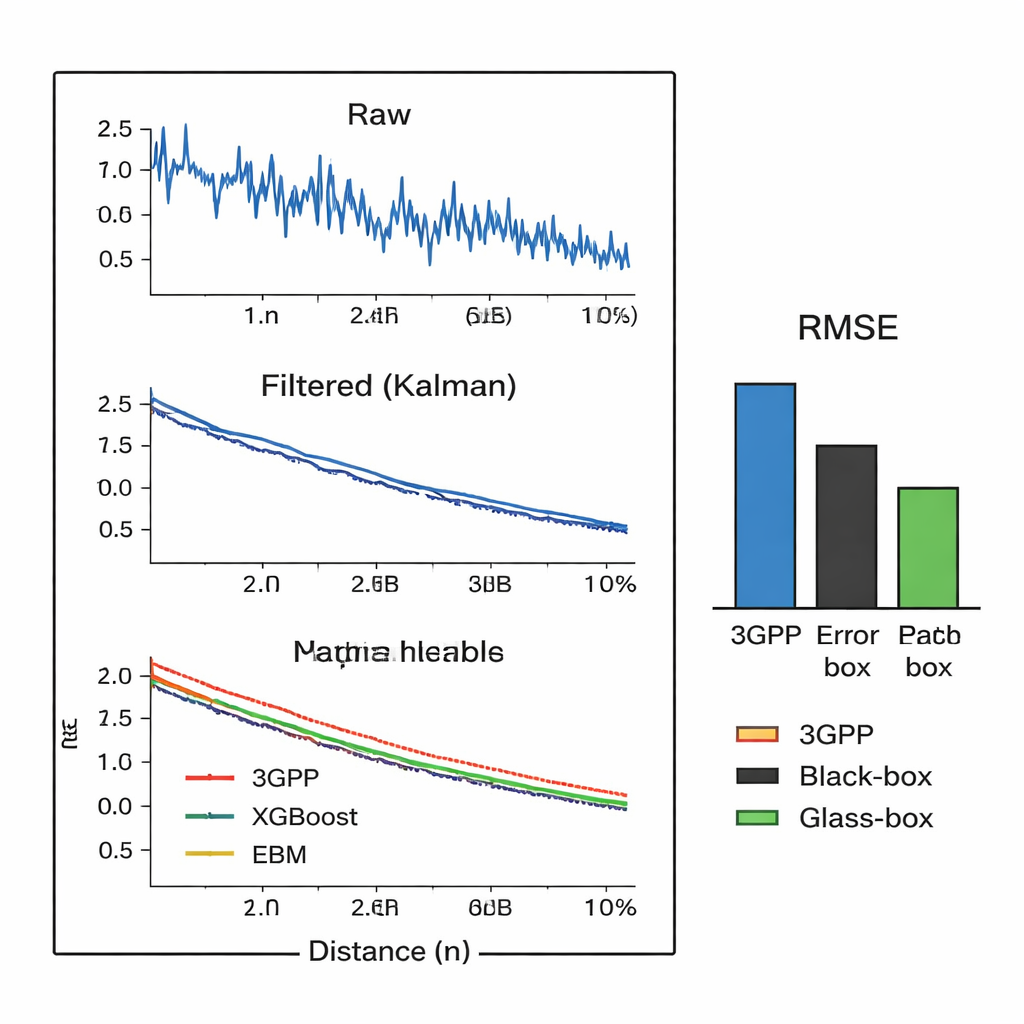
Los datos inalámbricos del mundo real están llenos de irregularidades causadas por errores de medición, reflexiones en edificios y bloqueos repentinos por vehículos en movimiento. Los investigadores diseñan una canalización de preprocesado para domesticar este caos. Primero, reescalan todas las características de entrada—como la distancia, la posición del coche y la velocidad—para que sean comparables. Luego eliminan valores atípicos usando una regla estadística robusta que recorta mediciones extremas e inconsistentes. Finalmente, aplican un filtro de Kalman optimizado, una herramienta clásica de la teoría de control, para suavizar la señal en función de la distancia preservando sus tendencias subyacentes. Al ajustar los parámetros del filtro para maximizar el rendimiento de los modelos posteriores, muestran que este proceso de limpieza puede reducir los errores de predicción en más de la mitad y revelar patrones estables que los modelos pueden aprender.
Abrir la caja negra de la IA
Las fórmulas tradicionales para la planificación inalámbrica, como los modelos 3GPP y de doble pendiente, son sencillas y transparentes pero a menudo no capturan la complejidad de las ciudades densas. Por otro lado, métodos de aprendizaje automático populares como random forests y XGBoost alcanzan gran precisión pero actúan como cajas negras: proporcionan predicciones con poca explicación de por qué. Este trabajo se centra en una vía intermedia: modelos “caja de cristal” que siguen siendo lo bastante simples matemáticamente para interpretarse, pero que capturan comportamientos no lineales. Los autores prueban tres de estos modelos—Explainable Boosting Machines, Modelos Aditivos Generalizados y Modelos Neurales Aditivos Generalizados—junto a algoritmos tradicionales de caja negra y fórmulas clásicas, empleando particiones estrictas de entrenamiento/prueba y validación cruzada de 5 pliegues en todos los escenarios.
Qué impulsa la pérdida de señal en las vías reales
Al combinar sus datos limpiados con modelos interpretables, los autores pueden identificar qué factores importan más para la pérdida de trayectoria en entornos urbanos. La distancia entre el coche y la unidad en el arcén domina, como era de esperar, pero las coordenadas GPS precisas del vehículo y el tiempo también contribuyen, reflejando cómo la disposición de las calles y los patrones de tráfico moldean el canal. Para escenarios complejos—como tramos NLOS detrás de edificios, bajo puentes, a través de copas de árboles o entre camiones pesados—los modelos caja de cristal igualan o se quedan ligeramente por debajo de los mejores modelos de caja negra en precisión, y aun así muestran claramente cómo cada factor empuja la predicción hacia arriba o hacia abajo. El estudio también evalúa tiempo de cómputo y consumo energético, concluyendo que estos modelos interpretables son lo bastante rápidos y ligeros para su despliegue en tiempo real en unidades en el arcén y dispositivos a bordo.
Construir redes vehiculares más seguras y transparentes
Para un lector no especializado, el mensaje clave es que ahora podemos predecir con precisión y claridad qué tan bien un coche “escuchará” la carretera en ciudades congestionadas. En lugar de confiar en IA opaca que nadie comprende completamente, este marco emplea exploración de datos, filtrado de ruido y modelos explicables para ofrecer una precisión cercana al estado del arte mientras muestra exactamente qué factores importan. Esa transparencia es crucial para sistemas Vehicle-to-Everything críticos para la seguridad, donde ingenieros, reguladores e incluso los tribunales pueden necesitar auditar decisiones. El trabajo sugiere un camino hacia futuras redes coche-carretera 5G/6G que no solo sean rápidas y fiables, sino también responsables y más fáciles de diseñar, probar y confiar.
Cita: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Palabras clave: vehículo-a-infraestructura, predicción de pérdida de trayectoria, IA explicable, canales inalámbricos, 5G V2X