Clear Sky Science · es
Conjunto de datos multisentido sincronizado en el tiempo adquirido desde múltiples radares y receptor RF
Por qué importa vigilar los cielos
Los drones han pasado rápidamente de ser juguetes y herramientas de cine a máquinas esenciales para reparto, inspección, agricultura y más. Pero las mismas aeronaves pequeñas que nos ayudan también pueden ser usadas indebidamente para espiar, introducir contrabando o incluso atacar. Frenar drones peligrosos es difícil porque son pequeños, rápidos y a menudo vuelan en escenas reales con muchos elementos. Este artículo presenta un nuevo conjunto de datos abierto que ayuda a científicos e ingenieros a desarrollar sistemas más inteligentes para detectar, seguir e identificar drones usando sus huellas invisibles de radio en lugar de basarse solo en su aspecto o sonido.
Escuchar los drones con ondas invisibles
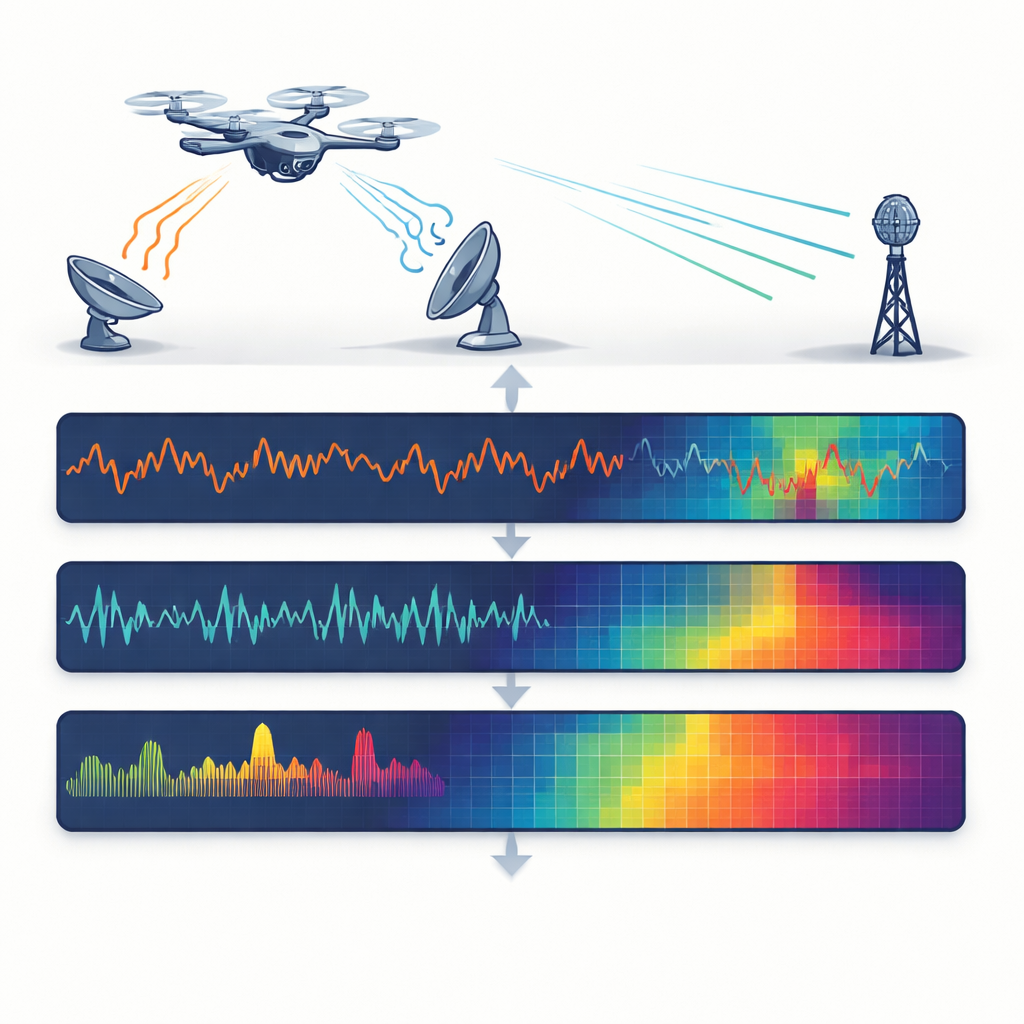
En lugar de depender de cámaras o micrófonos, los investigadores se centran en las ondas de radio, que funcionan de día o de noche y en niebla, lluvia o deslumbramiento. Usan tres sensores basados en radio al mismo tiempo: un radar que emite un tono continuo para detectar movimiento, otro radar que barre la frecuencia para medir distancia y velocidad, y un receptor de radio que simplemente escucha las señales de control y vídeo del dron. Cada sensor ve el dron de una manera distinta: a través de pequeñas vibraciones de las palas giratorias, su cambio de distancia al sensor o la estructura de su enlace inalámbrico; algo así como combinar vista, oído y tacto para obtener una imagen más completa.

Construir un polígono de pruebas cuidadosamente controlado
Para crear datos fiables, el equipo voló cuatro drones comerciales populares y colocó un simple reflector de esquina metálico como referencia no dron en un campo abierto sin edificios altos. Todos los blancos se mantuvieron a la misma altura y orientados hacia un conjunto de sensores montados juntos en trípodes, de modo que cada dispositivo observó la escena desde casi exactamente el mismo ángulo. Los drones se midieron a distancias de 2 a 30 metros en pasos de 2 metros, con 500 grabaciones repetidas para cada combinación de tipo de dron, distancia y sensor. Este diseño cuidadoso permite estudiar cómo cambia la detección a medida que un dron se aleja y comparar distintos modelos que varían en tamaño, peso y construcción.
Hacer que diferentes sensores respiren al unísono
Una fortaleza clave del conjunto de datos es que los tres sensores están sincronizados en el tiempo por software. Todos los dispositivos son controlados por un único programa que los dispara juntos y guarda sus salidas a la par. Cada grabación de un sensor tiene una compañera correspondiente de los otros, alineadas por un índice compartido en vez de por complejos relojes de hardware. Para los dos radares, el sistema captura ya sea señales en crudo o mapas procesados que muestran cómo se distribuye la energía reflejada en distancia y velocidad. Para el receptor de radio, se almacena la señal de comunicación en crudo. Esta sincronización permite a los investigadores fusionar directamente información entre sensores —por ejemplo, correlacionar un parpadeo en el movimiento de las palas con un estallido en el enlace de control— sin tener que esforzarse en alinear las señales después.
De las ondas crudas a imágenes listas para máquinas
Puesto que las herramientas modernas de detección a menudo se basan en aprendizaje profundo, los autores también convierten las medidas crudas en vistas tipo imagen que los ordenadores pueden procesar con facilidad. Para el radar de tono continuo, extraen los patrones de frecuencia producidos por las hélices giratorias, conocidos como micromovimientos, y los representan como espectros simples. Para el radar de barrido, generan imágenes coloridas distancia–velocidad que resaltan dónde y cómo se mueve el dron, tras eliminar el ruido de fondo. Para el receptor de radio, calculan cómo se distribuye la potencia a través de las frecuencias, creando huellas de estilo de comunicación de cada dron. Cada archivo en crudo tiene un archivo de imagen correspondiente, de modo que los científicos pueden elegir trabajar a nivel de señal o conectarse directamente a redes neuronales estándar basadas en imágenes.
Demostrar que más ojos son mejores que uno
Para mostrar que el conjunto de datos no es solo interesante sino útil, el equipo entrena una red de reconocimiento de imágenes conocida por separado con las imágenes de cada sensor y luego con combinaciones fusionadas de los tres. Como era de esperar, los radares tienen más dificultades a medida que el dron se aleja: las señales reflejadas se debilitan y la precisión de clasificación baja con la distancia. El receptor de radio resiste mejor el rango, pero algunos drones comparten bandas de comunicación casi idénticas y son difíciles de distinguir con ese sensor por sí solo. Cuando los investigadores combinan las tres vistas en entradas compuestas únicas, el rendimiento mejora en general, especialmente para drones más pequeños y difíciles de detectar. Esto demuestra que la información multisentido sincronizada puede compensar los puntos ciegos de cualquier dispositivo individual.
Qué significa esto para un espacio aéreo más seguro
En términos sencillos, los autores han construido un detallado “campo de entrenamiento” público donde algoritmos inteligentes pueden aprender a reconocer drones usando múltiples tipos de ojos radioeléctricos a la vez. Al publicar tanto señales en crudo como imágenes listas para usar, junto con código de ejemplo, reducen la barrera para que otros diseñen sistemas de detección que funcionen con fiabilidad en condiciones cambiantes y a distintas distancias. Con el tiempo, las herramientas basadas en este conjunto de datos podrían ayudar a aeropuertos, instalaciones críticas y autoridades municipales a distinguir mejor drones amistosos de los sospechosos, haciendo el espacio aéreo a baja altura más seguro sin depender exclusivamente de cámaras o vigilantes humanos.
Cita: Han, SK., Jung, YH. A Time-Synchronized Multi-Sensor drone dataset acquired from multiple radars and RF receiver. Sci Data 13, 407 (2026). https://doi.org/10.1038/s41597-026-06802-6
Palabras clave: detección de drones, sensado por radar, señales de radiofrecuencia, fusión de sensores, conjunto de datos abierto