Clear Sky Science · es
Un conjunto de datos de referencia abierto para aprendizaje automático y optimización inteligente de trayectorias en sistemas aéreos no tripulados de ala fija
Por qué importan los vuelos de drones más inteligentes
Desde inspecciones de cultivos hasta búsqueda y rescate, los drones de ala fija realizan silenciosamente una cantidad creciente de trabajo sobre nuestras cabezas. Hacer que estas aeronaves sean más fiables e independientes de los pilotos humanos podría desbloquear entregas más seguras, una monitorización ambiental más precisa y operaciones más resilientes en emergencias o zonas de conflicto. Pero el progreso está cada vez más limitado no por la falta de ideas ingeniosas, sino por la escasez de datos del mundo real. Este artículo presenta un nuevo conjunto de datos abierto de cientos de vuelos autónomos de drones, diseñado para que ingenieros y estudiantes de cualquier lugar puedan desarrollar y evaluar algoritmos de vuelo más inteligentes sobre una misma base rica y compartida.
Un laboratorio volador para misiones del mundo real
Los autores construyeron su conjunto de datos utilizando un avión tipo planeador motorizado robusto llamado Volantex Ranger 2400. Con su envergadura de dos metros y medio, una forma de ala eficiente y un fuselaje espacioso, la aeronave puede transportar electrónica moderna mientras se mantiene en el aire para misiones largas y estables. Está propulsada por un motor eléctrico montado en la parte trasera y un paquete de baterías de iones de litio personalizado, afinado para la autonomía en lugar de ráfagas de potencia cortas. El equipo operó esta plataforma en modo completamente autónomo, empleando rutas preplanificadas que cubrieron fases clave del vuelo: despegue, tramos rectos de crucero, giros cerrados, maniobras dinámicas y aterrizajes automáticos. Este montaje controlado pero realista convierte al Ranger en un laboratorio volador que se comporta como los drones operativos pequeños usados en entornos civiles y de defensa.
Dos cerebros, un avión
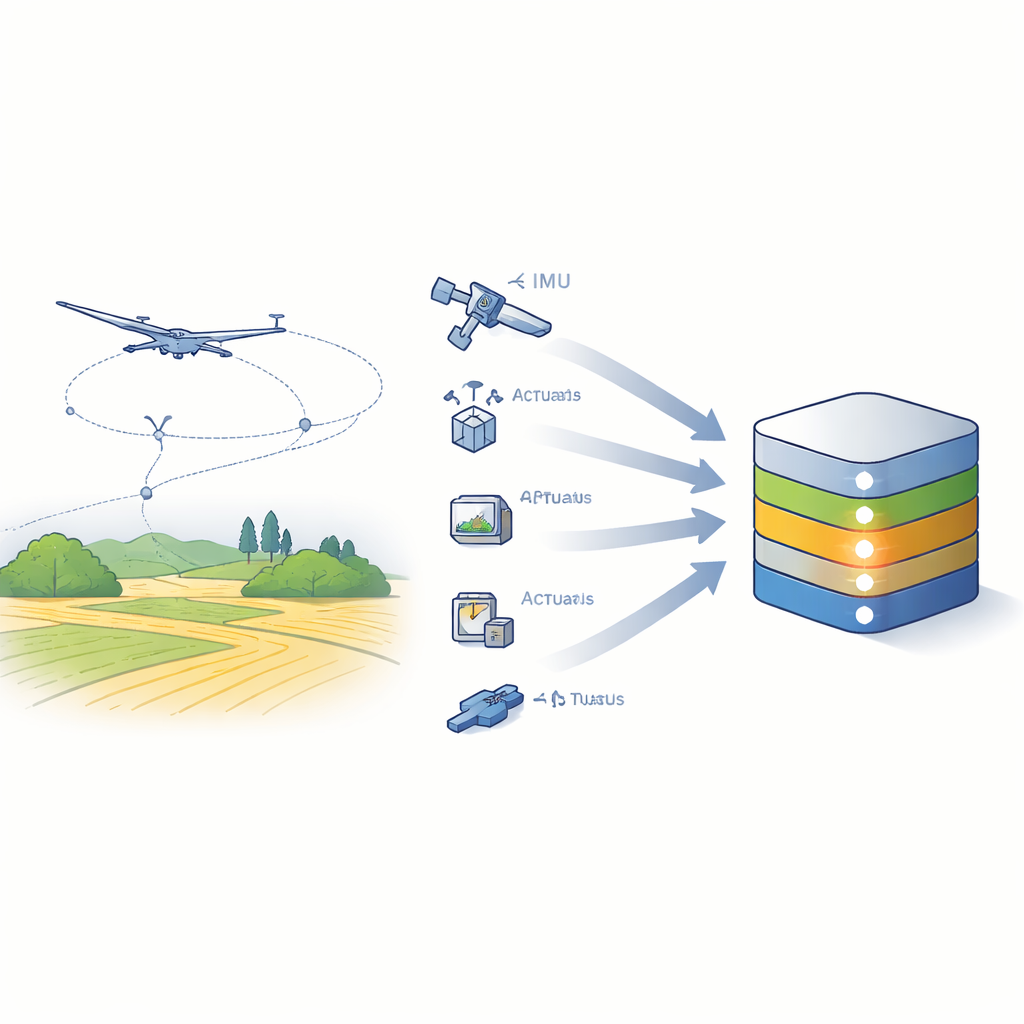
Para capturar una amplia gama de casos de uso, los investigadores equiparon el mismo célula con dos “cerebros” muy diferentes. Una configuración utiliza un controlador de vuelo compacto y económico SpeedyBee F405, similar en espíritu a la electrónica que los aficionados podrían montar en un dron casero. La otra combina un piloto automático profesional Pixhawk 6X con un potente ordenador Jetson Orin NX, capaz de ejecutar a bordo software de inteligencia artificial exigente. Ambos sistemas registran telemetría detallada, incluyendo movimiento de sensores inerciales, posición y velocidad por GPS, altitud, velocidad del aire, comandos a superficies de control, estado de la batería y modo de vuelo, a tasas lo suficientemente altas como para reconstruir el movimiento de la aeronave con gran detalle. Al mantener la célula constante mientras se intercambian las electrónicas, el conjunto de datos permite a los investigadores estudiar cómo distintos niveles de computación y sensado a bordo afectan el comportamiento de vuelo.
Qué contiene el conjunto de datos
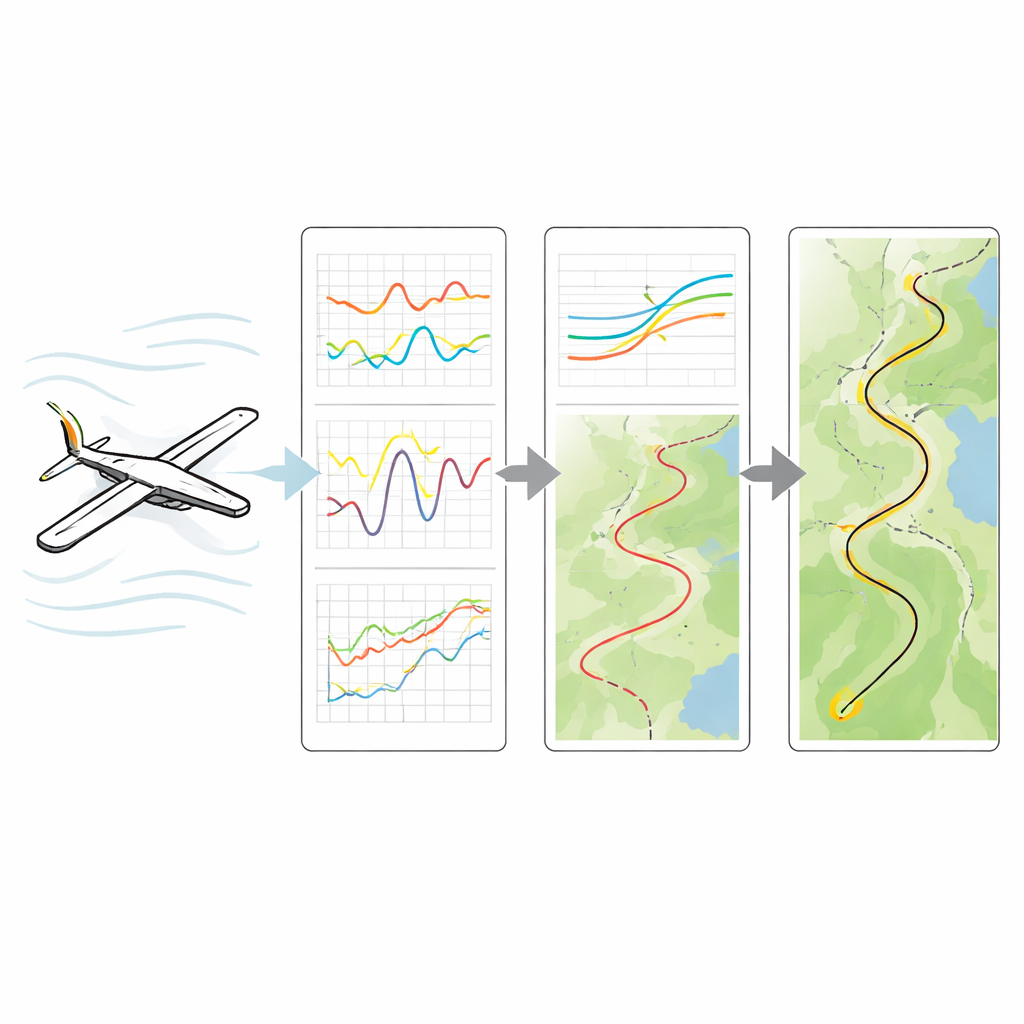
La colección resultante IDF‑DS consta de 240 vuelos autónomos, aproximadamente 32 horas de tiempo en el aire y decenas de millones de muestras registradas. Cada vuelo se almacena con una estructura de carpetas coherente para que los usuarios puedan encontrar rápidamente el registro principal, el plan de misión, la configuración del controlador y una pista GPS lista para ver. Una familia de misiones sigue un patrón en zigzag sobre un campo rectangular, ideal para comparaciones repetibles o para entrenar modelos predictivos. Otra traza un bucle tipo circuito de carrera inspirado en un famoso trazado de MotoGP, introduciendo curvas cerradas, barridos y tramos rectos que desafían al piloto automático. Para cada configuración y misión, los registros capturan cómo voló realmente la aeronave, no solo cómo debía volar.
Convertir vuelos en crudo en conclusiones
Para mostrar lo que se puede hacer con este tesoro, los autores recorren varios análisis de ejemplo. Verifican la calidad de los sensores de movimiento a bordo comparándolos con las aceleraciones y rotaciones inferidas de la trayectoria basada en GPS, confirmando que las mediciones son lo bastante fiables como para servir de «verdad de referencia» para entrenar modelos. Estudian qué tan bien el piloto automático estima la velocidad en tres direcciones, cuán estrechamente la aeronave sigue su ruta planeada y cuánta energía eléctrica consume durante ascensos, giros y cruceros constantes. Al combinar velocidad del aire, velocidad respecto al suelo y actitud, incluso reconstruyen el viento que experimentó el avión a lo largo de su ruta, construyendo un mapa de rachas y viento cruzado únicamente a partir de lecturas a bordo. Otro caso de uso describe cómo las mismas corrientes de datos podrían entrenar un modelo de inteligencia artificial para estimar la posición cuando la navegación por satélite no está disponible.
Cómo este recurso ayuda a futuros vuelos
En términos cotidianos, este trabajo consiste en dar a la comunidad una «caja negra» compartida de cientos de vuelos que cualquiera puede abrir. En lugar de que cada equipo tenga que recopilar sus propios y costosos datos de prueba —y mantenerlos privados—, investigadores y estudiantes pueden descargar este conjunto de datos abierto y comenzar de inmediato a explorar nuevas formas de mantener los drones en ruta cuando el GPS falla, detectar fallos antes de que sean peligrosos o alargar la vida de la batería eligiendo rutas más eficientes. El artículo en sí no construye estos sistemas inteligentes; construye la base que requieren. Para los lectores, la conclusión es que el progreso en la autonomía aérea depende ahora tanto de registros de vuelo abiertos y bien documentados como de algoritmos ingeniosos, y este conjunto de datos es un paso sustancial hacia ese futuro.
Cita: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Palabras clave: drones de ala fija, telemetría de vuelo, navegación autónoma, conjunto de datos para aprendizaje automático, optimización de trayectorias