Clear Sky Science · es
SPICE-HL3: Conjunto de datos de cámara mono-fotón, inercial y estereoscópica para la exploración de paisajes lunares de alta latitud
Por qué importan las sombras lunares para los robots
Las misiones futuras a las regiones polares de la Luna desean aprovechar el agua congelada y otros recursos, pero estas zonas también son algunos de los lugares más confusos visualmente del Sistema Solar. Sombras largas y móviles, deslumbrantes reflejos y oscuridad casi total pueden engañar fácilmente las cámaras de un robot. Este artículo presenta SPICE‑HL3, un nuevo conjunto de datos abierto creado en un “trozo de Luna” en interiores que permite a científicos de todo el mundo probar cómo ven y navegan los robots en estas duras condiciones polares, incluso con una cámara de un solo fotón de vanguardia que, literalmente, puede ver en la oscuridad.
Construyendo un fragmento de los polos lunares en la Tierra
Dado que los datos reales de los polos lunares son escasos y caros de obtener, el equipo construyó una plataforma de pruebas controlada llamada LunaLab en la Universidad de Luxemburgo. Es un paisaje interior de 11 por 8 metros lleno de grava basáltica gruesa, rocas y cráteres, rodeado de paredes y techos negros para imitar el entorno sin aire y absorbente de luz de la Luna. Un potente foco móvil imita al Sol situado muy bajo en el horizonte, produciendo sombras largas y nítidas y enormes diferencias de brillo entre las laderas iluminadas y los interiores de los cráteres en completa oscuridad. Al cambiar la posición y la potencia de la lámpara, los investigadores reprodujeron cuatro regímenes de iluminación distintos—referencia, mediodía, amanecer/atardecer y noche—similares a lo que experimentaría un rover durante un día lunar completo cerca de los polos. 
Rovers, sensores y una cámara que contabiliza fotones individuales
El conjunto de datos se recopiló utilizando dos pequeños rovers con ruedas que llevaban diferentes combinaciones de cámaras y sensores de movimiento. Un rover montaba una cámara monocroma convencional y una novedosa cámara SPAD (diodo de avalancha de un solo fotón); el otro transportaba una cámara estéreo de color más profundidad con un sensor de movimiento integrado. Ambos rovers registraron la rotación de las ruedas y datos inerciales, mientras que un sistema de captura de movimiento aéreo seguía sus posiciones reales con precisión submilimétrica. La cámara SPAD es la tecnología destacada: en lugar de medir la luz como un valor de intensidad continua, cada píxel informa si detectó fotones individuales, con velocidad y sensibilidad extremadamente altas. Al combinar muchas de estas instantáneas binarias ultrarrápidas, el sistema puede reconstruir imágenes que conservan detalles incluso en escenas muy tenues o con contrastes extremos donde las cámaras convencionales tienden a emborronarse o saturarse.
Capturando recorridos tipo lunar en muchas variantes
Para ofrecer a los investigadores un banco de pruebas rico, los autores diseñaron siete tipos de trayectorias de rover, desde trayectos largos con paradas que imitan una conducción planetaria cautelosa hasta carreras cortas y continuas en diferentes direcciones respecto al Sol artificial (hacia él, en sentido contrario y de costado) y giros cerrados en el mismo lugar. Repetieron estas trayectorias a velocidades lentas similares a caminar y a velocidades diez veces mayores, bajo múltiples condiciones de iluminación, a veces con los faros del rover encendidos y otras apagados. En total, SPICE‑HL3 contiene 88 secuencias sincronizadas en el tiempo, casi 1,3 millones de imágenes y datos de movimiento y de referencia correspondientes. Las imágenes abarcan escenas estáticas ideales para análisis detallados y secuencias rápidas que fuerzan el desenfoque por movimiento y el control de exposición. Todo está empaquetado en una estructura de archivos claramente organizada, con archivos de calibración que describen exactamente cómo está orientada cada cámara y sensor y cómo se sincronizan sus relojes en el tiempo.
Poniendo a prueba la visión de un solo fotón
Más allá de publicar los datos, el equipo comprobó la calidad y utilidad de las imágenes registradas. Compararon cómo la SPAD, la cámara monocroma y la cámara estéreo afrontaron algunas de las situaciones visuales más difíciles: recorridos al anochecer y de noche, y tramos donde el rover miraba directamente hacia el “Sol”. Usando medidas simples de calidad de imagen e inspección visual, encontraron que la cámara de un solo fotón preservaba de forma consistente la estructura en regiones tanto brillantes como en sombra, mantenía un amplio rango de niveles de brillo y se mostró estable en una variedad de condiciones. Las cámaras convencionales funcionaron bien cuando la escena estaba bien iluminada, pero perdieron detalle en áreas muy oscuras o quemaron las altas luces cerca de la fuente luminosa. Los autores también verificaron que el software común de cartografía y localización podía procesar con éxito el conjunto de datos, confirmando que las marcas de tiempo, las calibraciones y los formatos son lo suficientemente robustos para la investigación robótica real. 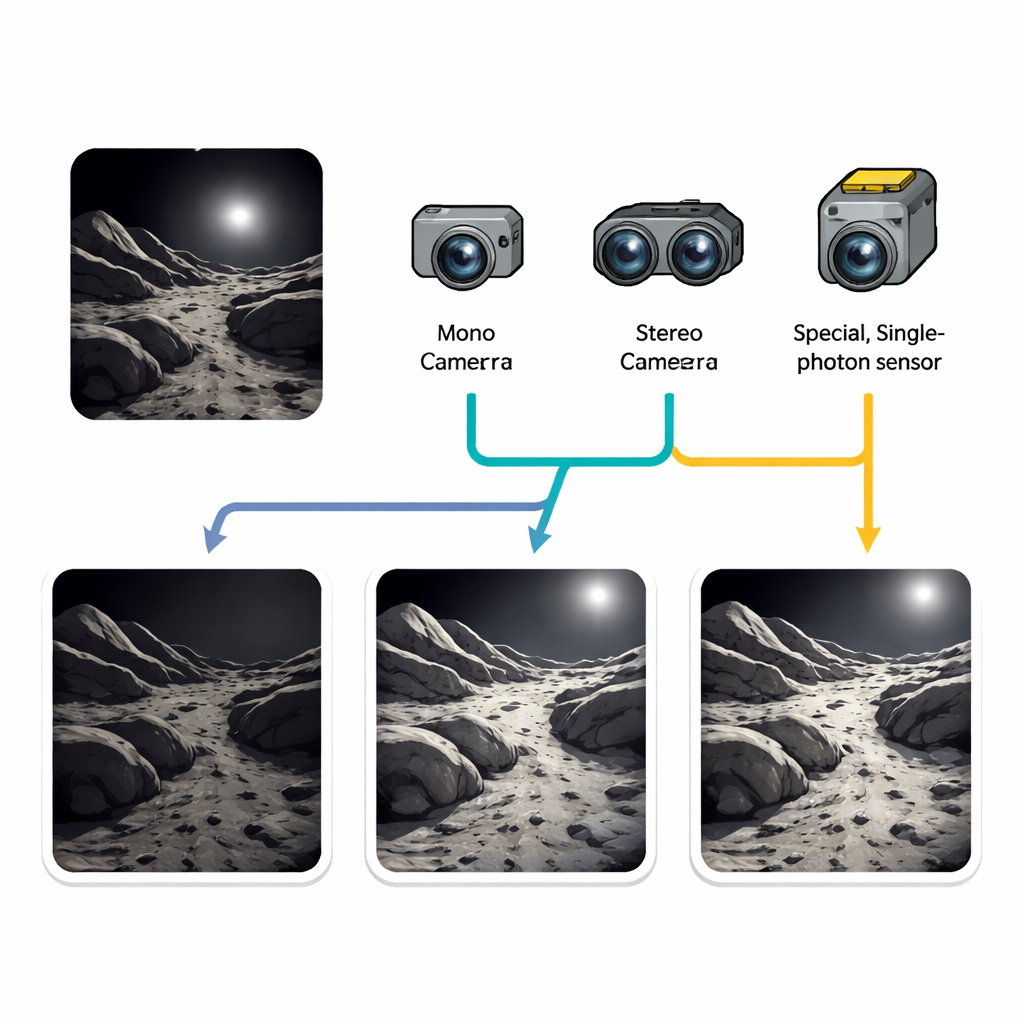
Límites, salvedades y por qué esto importa
Aunque LunaLab no puede reproducir perfectamente las diminutas partículas de polvo y los sutiles efectos de dispersión de luz del verdadero regolito lunar, y un resplandor infrarrojo no intencionado del sistema de captura de movimiento se filtró en las escenas más oscuras, los autores sostienen que SPICE‑HL3 sigue representando un exigente entorno óptico de “peor caso” para la visión de los rovers. Para ingenieros y científicos que preparan misiones a los polos lunares—o diseñan robots para cualquier entorno tenue y de alto contraste—el conjunto de datos ofrece un raro punto de referencia público. Permite comparar de manera justa nuevas tecnologías de cámaras como los sensores SPAD frente a sistemas tradicionales, mejorar algoritmos de navegación y cartografía y, en última instancia, ayudar a garantizar que los futuros rovers puedan seguir avanzando de forma segura a través de las sombras cambiantes de la Luna en lugar de quedarse varados en la oscuridad.
Cita: Rodríguez-Martínez, D., van der Meer, D., Song, J. et al. SPICE-HL3: Single-Photon, Inertial, and Stereo Camera dataset for Exploration of High-Latitude Lunar Landscapes. Sci Data 13, 374 (2026). https://doi.org/10.1038/s41597-026-06668-8
Palabras clave: robótica lunar, navegación planetaria, imagen de un solo fotón, conjuntos de datos para visión robótica, iluminación extrema