Clear Sky Science · es
Fabricación in situ escalable de piel electrónica multimodal para robótica inteligente y sistemas interactivos
Dotar a robots y juguetes de un sentido del tacto
Imagínese un robot que puede recoger con delicadeza una rebanada de pan caliente sin aplastarla ni quemarle la mano, o un juguete que responde de forma diferente cuando lo abrazas, doblas su oreja o lo calientas con la palma. Esta investigación describe un nuevo tipo de “piel electrónica” que acerca estas ideas a la realidad dando a las máquinas un sentido del tacto y del entorno cercano más rico y similar al humano.
Por qué las máquinas necesitan un tacto mejor
Los robots y aparatos de hoy siguen siendo torpes al interactuar con el mundo real. Muchos solo pueden percibir una única magnitud, como la presión, y a menudo dependen de componentes voluminosos y montados a mano que son difíciles de escalar. Sin embargo, la piel humana mezcla constantemente múltiples señales: toque suave, presión firme, estiramiento, calor e incluso la percepción de objetos cercanos antes del contacto. Los autores de este estudio se propusieron construir una versión electrónica de la piel que capture varias de estas sensaciones a la vez, manteniéndose delgada, flexible y fácil de personalizar para distintas tareas.
Construir un sentido del tacto delgado y flexible
El equipo creó una “e-piel” de bajo perfil empleando un proceso sin sala blanca que puede escalarse y adaptarse rápidamente. En su núcleo hay un circuito de cobre flexible patrónizado mediante láser ultravioleta, que actúa como el cableado de una placa de circuito pero puede doblarse y envolver superficies curvas. Sobre y bajo este circuito añadieron una capa de silicona blanda llena de diminutos poros de aire, similar a una esponja. Las superficies exteriores están recubiertas con una película delgada de nanotubos de carbono que forma una cáscara conductora que a la vez protege el dispositivo del ruido eléctrico y sirve como capa de referencia común para la detección. Esta estructura permite que cada almohadilla sensora se comporte como un pequeño condensador eléctrico cuyo valor cambia cuando el material se presiona, se dobla, se calienta o se acerca a un objeto. Pequeños chips adicionales montados en el mismo circuito flexible miden la temperatura y la distancia sin contacto, de modo que la hoja imita no solo los receptores de presión y estiramiento de la piel, sino también la sensación de calor y una especie de “visión cercana”. 
Cómo los sensores perciben presión y movimiento
Las partes de la e-piel que detectan presión y flexión están diseñadas para reaccionar con fuerza ante pequeños cambios mientras permanecen duraderas. Cuando algo empuja hacia abajo, los poros de la capa blanda se comprimen, acercando las capas metálicas internas y reemplazando aire por más silicona. Ambos efectos aumentan la señal eléctrica, especialmente a bajas presiones, donde el material es más fácil de comprimir. Las pruebas mostraron que la e-piel puede detectar toques muy suaves, hasta unas decenas de pascales, con respuesta rápida y poco derivo incluso tras diez mil ciclos de presión y liberación. Cuando la lámina se dobla, pliega el cableado interno, reduciendo de nuevo la separación entre capas en un lado y aumentando la señal. La respuesta se intensifica con ángulos de flexión mayores, coincidiendo con la tendencia real de que las curvaturas se localizan en una zona en lugar de repartirse uniformemente. En conjunto, el diseño equilibra suavidad, estabilidad y sensibilidad sin las estructuras apiladas complejas usadas en muchos dispositivos anteriores. 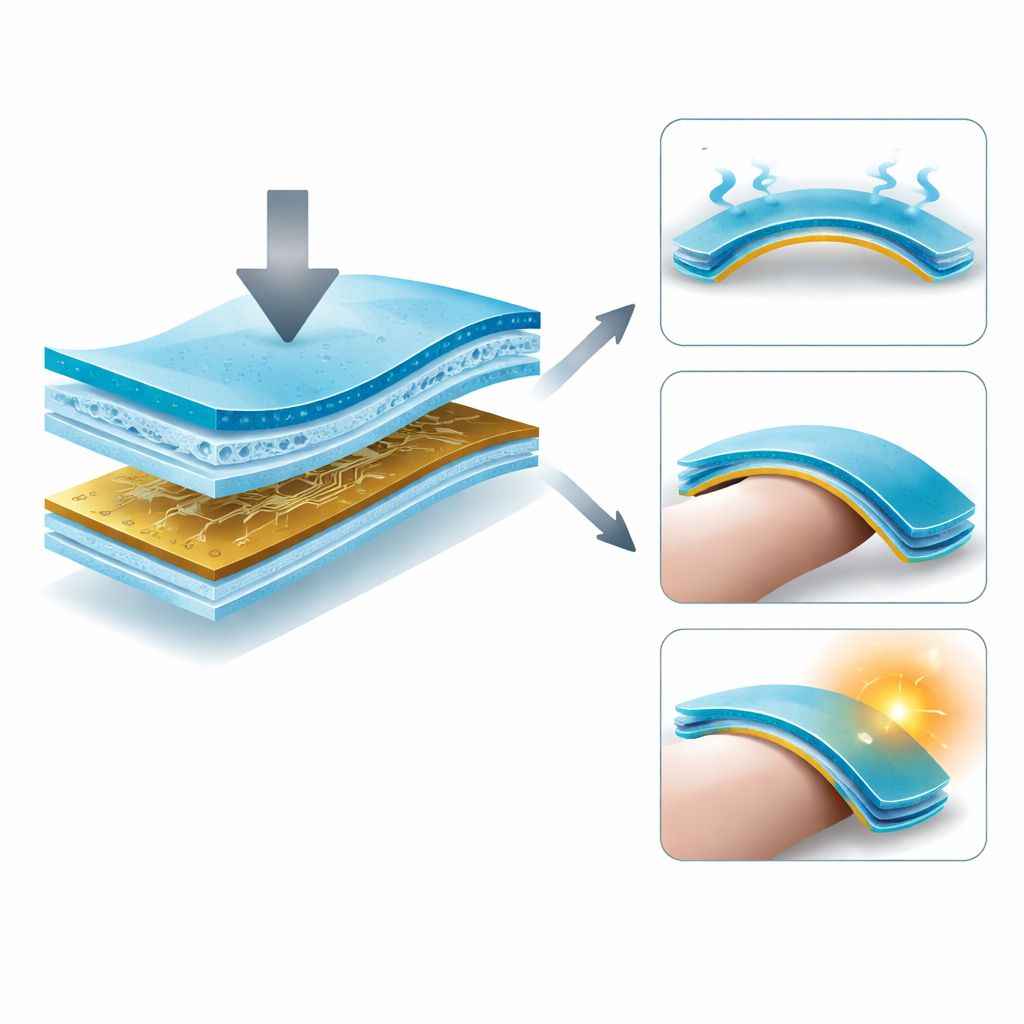
De robots de cocina a compañeros juguetones
Para demostrar lo que puede hacer esta e-piel, los investigadores la envolvieron alrededor de una pinza robótica y asignaron al robot una tarea tipo cocina. Conforme la pinza se acerca a una rebanada de pan caliente, un pequeño módulo de detección de profundidad incrustado en la piel mapear primero la distancia al objeto, ayudando al robot a alinear sus “dedos” antes del contacto. Una vez en contacto, los sensores de presión y flexión guían la fuerza de agarre, evitando deslizamientos o que el pan se aplaste. Un sensor de temperatura en la misma hoja comprueba cuándo el pan se ha enfriado lo suficiente para entregarlo con seguridad a una persona. En otro ejemplo, el equipo construyó un juguete blando con forma de elefante cubierto de e-piel. Presionar su pecho cambia el ritmo de un motor de vibración oculto para simular un latido, doblar una oreja activa un sonido y el calor de una mano puede iluminar las mejillas del juguete, transformando el tacto en una interacción lúdica y emocional.
Ver patrones de presión en una superficie
Más allá de puntos individuales, el mismo método de fabricación puede formar grandes matrices de detección de presión que leen dónde y con qué intensidad se toca una superficie. El equipo demostró una cuadrícula de 8 por 15 que funciona como una cámara de presión: a medida que dedos, pesos o moldes estampados presionan, el sistema reconstruye el patrón de fuerzas e incluso identifica contornos como letras. Esta capacidad de capturar mapas de presión y centros de masa podría ayudar a los robots a equilibrar cargas, reconocer objetos o actuar como plataformas de pesaje inteligentes y superficies interactivas. Debido a que el proceso subyacente es rápido y modular, los diseñadores pueden ajustar el tamaño, el espaciado y la suavidad de los píxeles sensores para distintos usos, desde muebles inteligentes hasta alfombrillas de monitorización de postura.
Qué significa esto para la tecnología cotidiana
Al combinar múltiples modos de detección —presión, flexión, calor y proximidad— en una sola hoja delgada y fácilmente personalizable, este trabajo acerca la piel electrónica a las capacidades sutiles de la piel humana. Aunque hay margen para mejorar el rendimiento a presiones muy altas y para automatizar algunos pasos de ensamblaje, el enfoque ya demuestra que se puede añadir un tacto rico a robots, juguetes y otros dispositivos sin hardware pesado montado a mano. En términos prácticos, esto podría dar lugar a robots domésticos que manipulen objetos frágiles con mayor seguridad, dispositivos médicos vestibles que registren el contacto con el cuerpo de forma más cómoda y productos interactivos que respondan a nuestro tacto de maneras mucho más naturales.
Cita: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Palabras clave: piel electrónica, detección táctil, sensores flexibles, pinza robótica, dispositivos interactivos