Clear Sky Science · es
Decodificando los movimientos del miembro fantasma a partir de registros intraneurales
Nuevas formas de moverse con una pierna ausente
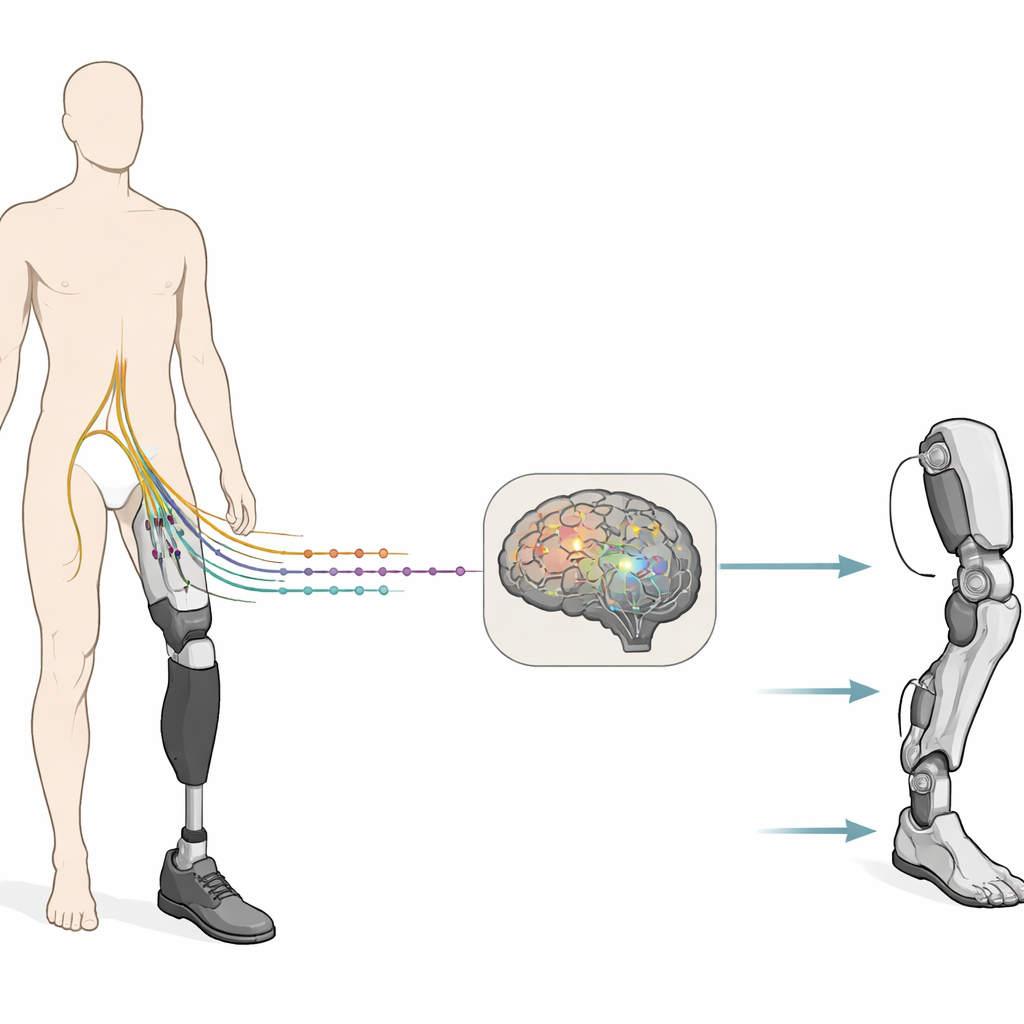
Para las personas que han perdido una pierna por encima de la rodilla, caminar con una prótesis puede sentirse más como manejar una máquina rígida que como mover una parte de su propio cuerpo. Este estudio explora una vía distinta: escuchar directamente los nervios que quedan en la pierna cuando los amputados intentan mover su pierna “fantasma”, y usar esas señales para controlar una futura extremidad biónica. Al aprovechar el mismo cableado que el cerebro usaba para mover la rodilla, el tobillo y los dedos, los investigadores muestran que el control natural e intuitivo de una pierna artificial podría estar al alcance.
Escuchando nervios dentro del muslo
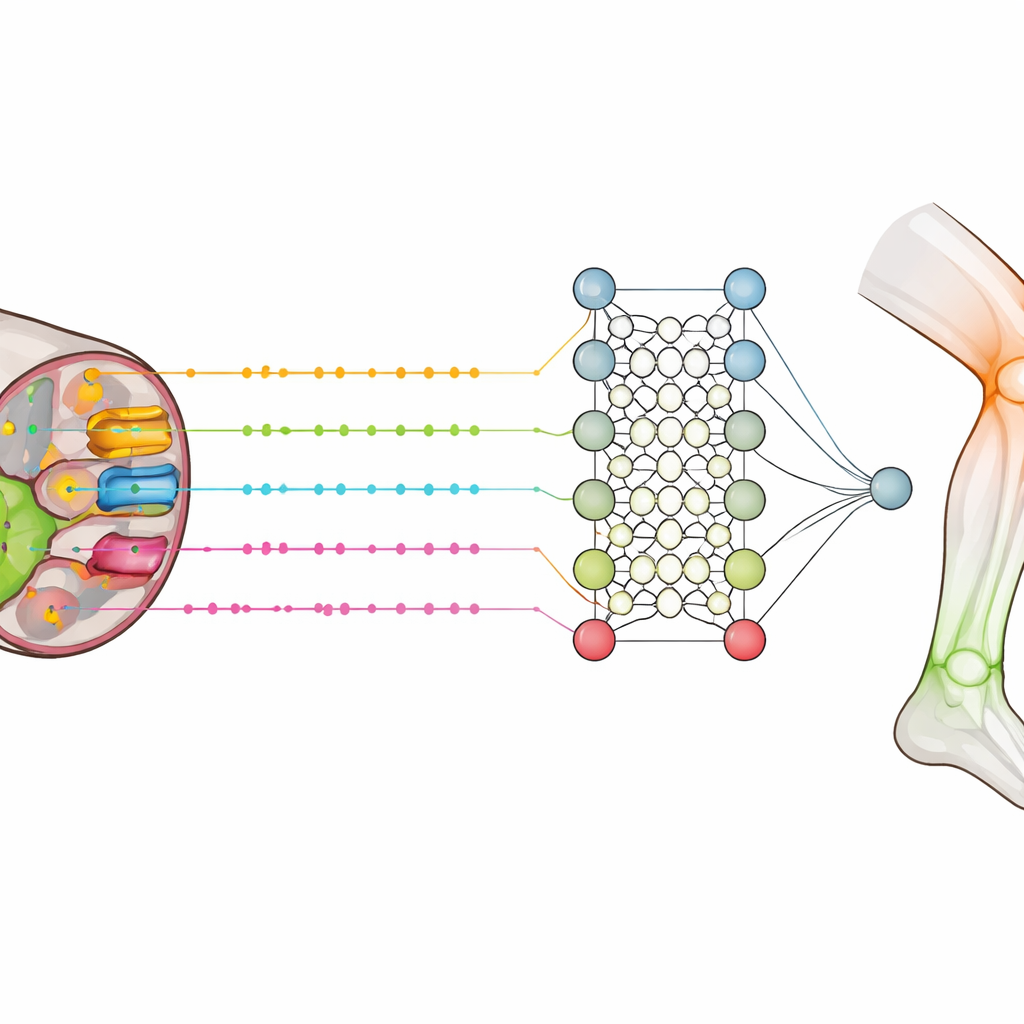
El equipo trabajó con dos voluntarios que habían perdido la pierna por encima de la rodilla pero aún podían sentir vívidamente y “mover” su miembro fantasma. Los cirujanos implantaron cuatro tiras de electrodos delgados como un cabello dentro de una rama del nervio ciático en la parte posterior del muslo. Cada tira llevaba múltiples sitios de registro diminutos, sumando 56 canales en total. Cuando los participantes estaban sentados y se les pidió que flexionaran y extendieran su rodilla, tobillo o dedos del pie fantasma a la orden, los electrodos captaron ráfagas de actividad eléctrica de fibras nerviosas que antes controlaban músculos que ya no estaban tras la amputación.
Los movimientos fantasma dejan rastros eléctricos reales
Aunque la parte inferior de la pierna ya no existía, los intentos de moverla produjeron señales claras y estructuradas en el nervio. La mayoría de los sitios de registro respondieron al menos a un tipo de movimiento, y muchos distinguían entre flexión y extensión. Algunos electrodos estaban más sintonizados con movimientos de la rodilla, otros con el tobillo o los dedos, reflejando cómo distintos grupos musculares conectan con el nervio. La fuerza y el momento de los patrones de disparo nervioso variaron según la articulación, lo que sugiere que el “mapa” original del control de la pierna permanece en el muñón nervioso. Los investigadores también encontraron que estos patrones motores coincidían bien con la anatomía conocida: los canales nerviosos que se activaban para un movimiento tendían a corresponder con los músculos que normalmente producirían esa acción.
Enseñando a un decodificador inspirado en el cerebro
Capturar la actividad nerviosa es solo la mitad de la historia; una prótesis futura debe convertir rápidamente esas señales complejas en comandos. Los científicos recurrieron a una red neuronal de picos, un tipo de red artificial que comunica mediante breves pulsos eléctricos, de forma similar a las neuronas reales. Primero transformaron las grabaciones nerviosas crudas en trenes densos de picos que destacaban cómo cambiaba la potencia de la señal en el tiempo. Esos trenes de picos se alimentaron a un decodificador compacto que aprendió a clasificarlos en “clases” de movimiento como flexión de tobillo o extensión de rodilla. En comparación con las herramientas estándar de aprendizaje automático, el decodificador basado en picos fue a la vez más preciso y más eficiente, reconociendo de forma fiable múltiples movimientos intencionados a partir de cortos fragmentos de actividad nerviosa.
Combinando señales nerviosas y musculares
Debido a que los electrodos se colocaron entre los músculos del muslo, también registraron pequeñas señales musculares en un rango de frecuencia más bajo. Filtrando las grabaciones, el equipo pudo separar la actividad de tipo muscular de los picos nerviosos de mayor frecuencia. Cuando entrenaron su decodificador solo con señales musculares, el rendimiento mejoró en comparación con usar únicamente datos nerviosos de alta frecuencia. Lo mejor fue que combinar ambas fuentes —nervio y músculo residual— incrementó aún más la precisión, especialmente para acciones de rodilla y tobillo. Esto sugiere que una única tecnología implantada podría aprovechar tanto el tráfico nervioso como la actividad muscular residual para ofrecer una señal de control más rica y estable para una pierna robótica.
Sentir el suelo mientras se mueve la pierna
Los mismos electrodos intraneurales que escuchaban las órdenes motoras también podrían usarse en sentido inverso: para enviar pequeñas pulsos eléctricos de vuelta al nervio y evocar sensaciones. En trabajos previos con estos voluntarios, la estimulación a través de estos implantes produjo sensaciones táctiles en la planta del pie y en los dedos. En el estudio actual, los investigadores cartografiaron dónde se solapaban los registros relacionados con el motor y las sensaciones táctiles. Encontraron que las fibras nerviosas dedicadas al movimiento y a la sensación estaban en gran medida separadas a nivel del muslo, lo que podría ayudar a los diseñadores a asignar algunos contactos principalmente al decodificado motor y otros principalmente a la retroalimentación sensorial, reduciendo la interferencia entre ambos.
Qué significa esto para las futuras piernas biónicas
Para un lector no especialista, el mensaje central es que los “cables” para mover una pierna ausente siguen activos y son legibles, incluso años después de la amputación. Al colocar electrodos finos dentro del nervio que queda y usar algoritmos inspirados en el cerebro para interpretar las señales, es posible saber, momento a momento, si un amputado está intentando doblar la rodilla, mover el tobillo o encoger los dedos de un miembro fantasma. Cuando se combina con estimulación eléctrica que restaura una sensación táctil del pie ausente, este enfoque podría permitir prótesis de pierna que se muevan y sientan mucho más como una extremidad natural. Aunque el trabajo aún está en una fase temprana de laboratorio y se probó sin conexión en solo dos personas, sienta una base importante para futuras prótesis que se conecten directamente al sistema nervioso, ofreciendo un control más intuitivo, mejor equilibrio y una mayor sensación de incorporación.
Cita: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Palabras clave: miembro fantasma, neuroprótesis, interfaz de nervio periférico, redes neuronales de picos, amputación de extremidad inferior