Clear Sky Science · es
Salto robótico mejorado mediante hipo‑gravedad inducida por empuje, logrando saltos precisos, predecibles y extendidos
Robots que pueden saltar como si estuvieran en la Luna
Imagine un robot de rescate que pueda saltar por encima de muros, brinacar arroyos o atravesar una ventana en movimiento sin fallar su punto de aterrizaje por más de un centímetro. Este artículo describe un nuevo tipo de máquina saltadora que hace exactamente eso, dándose brevemente una “baja gravedad”, como la que se experimenta en la Luna o Plutón, mientras mantiene sus saltos precisos y predecibles.
Por qué los robots saltadores tienen dificultades hoy
Animales como los saltamontes o las ranas pueden lanzar grandes saltos, aterrizar sobre perchas estrechas y corregir su trayectoria en el aire cuando algo cambia. La mayoría de los robots no pueden. Los robots saltadores tradicionales afrontan una disyuntiva: pueden saltar muy lejos usando muelles potentes o motores fuertes, o pueden aterrizar con precisión y seguridad, pero rara vez ambas cosas a la vez. Los diseños tipo “catapulta” con muelles almacenan mucha energía pero tardan en recargarse y son difíciles de controlar una vez en el aire. Las patas impulsadas directamente por motores son más fáciles de controlar pero carecen del impulso necesario para saltos muy altos. Aletas o rotores adicionales pueden prolongar el tiempo en vuelo, pero a menudo hacen que la trayectoria sea desordenada e impredecible, lo que es problemático si hay que alcanzar un objetivo pequeño o esquivar obstáculos en movimiento.
Simular baja gravedad con empuje aéreo
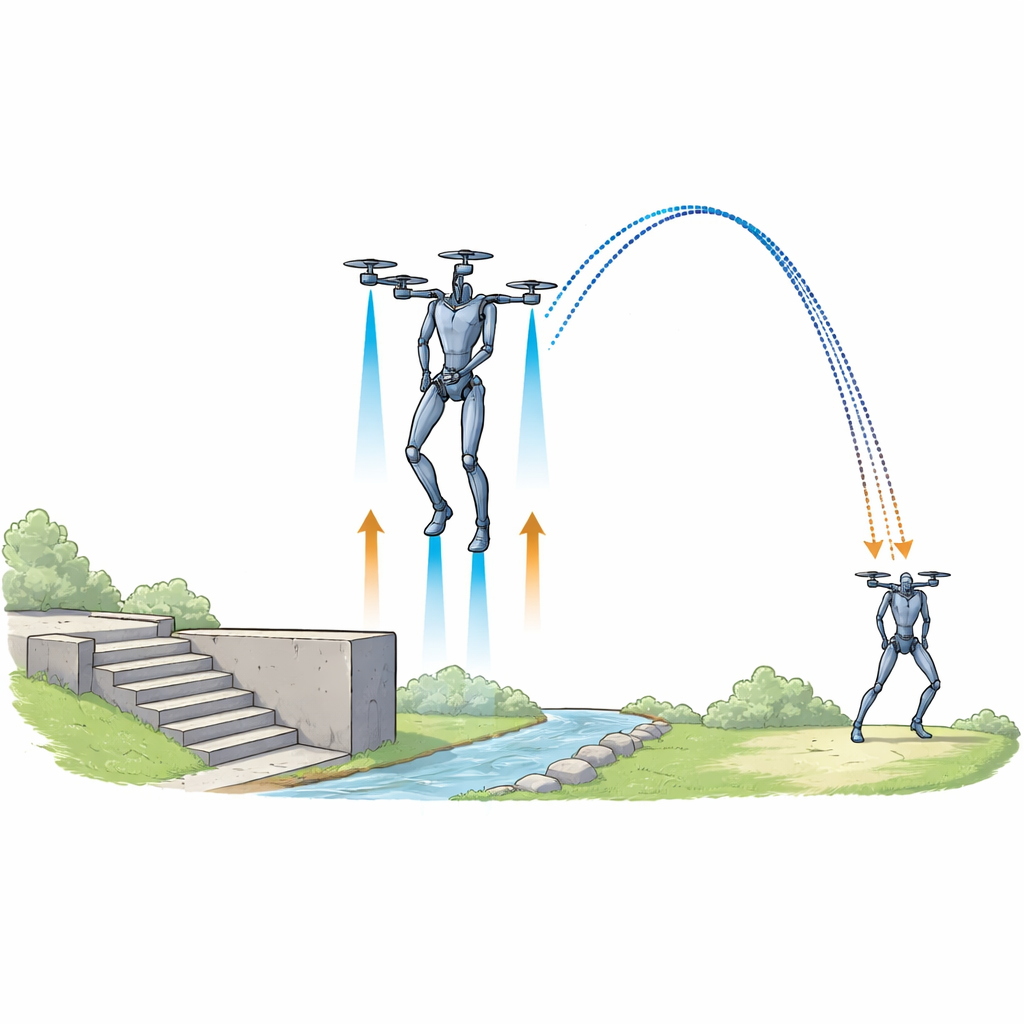
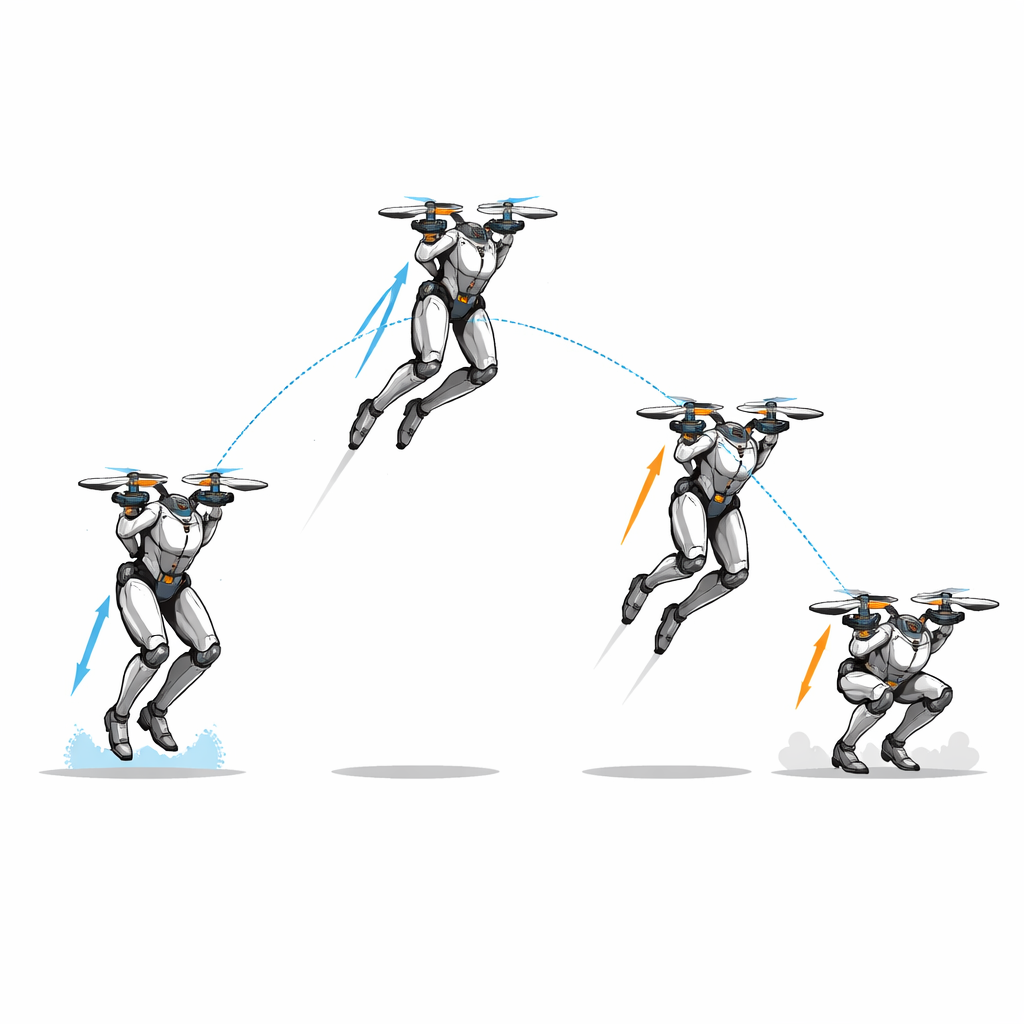
Los investigadores construyeron un robot bípedo de 370 gramos llamado GravOff que evita esta disyuntiva creando su propio entorno de baja gravedad. El robot tiene un par de patas largas, tipo insecto, accionadas directamente por motores, además de cuatro pequeños propulsores montados en un bastidor ancho. Durante un salto, las patas proporcionan un empujón rápido contra el suelo para alcanzar una alta velocidad de despegue. Al mismo tiempo, los propulsores empujan hacia arriba lo justo para cancelar parte de la gravedad terrestre, una condición que los autores denominan hipogravedad inducida por empuje. Debido a que la “gravedad efectiva” es menor, la misma potencia de las patas envía al robot a una parábola mucho más alta y larga: hasta 6,9 metros de altura, unas 46 veces su altura corporal, comparable con los mejores saltadores récord pero con velocidades de despegue y aterrizaje más suaves.
Dibujar y dirigir la parábola perfecta
Lo que hace a GravOff especialmente singular no es solo lo lejos que salta, sino lo precisamente que sigue una trayectoria escogida. El equipo trata cada salto como una parábola con marca temporal, donde posición y tiempo quedan vinculados como puntos en una curva dibujada. Usando sensores y un algoritmo de control predictivo, el robot compara su movimiento real en el aire con esta curva de referencia docenas de veces por segundo y inclina ligeramente sus rotores para corregir el rumbo. Crucialmente, los propulsores pueden girar independientemente de la inclinación del cuerpo del robot, de modo que el robot puede orientar su empuje sin tener que inclinar todo el bastidor, manteniendo separadas la estabilidad y la dirección. Este control dual permite a GravOff aterrizar dentro de un cuadrado de solo 25 centímetros de lado con repetibilidad a nivel de milímetro, incluso cuando el ángulo de despegue varía hasta 15 grados o cuando un ventilador fuerte le sopla con un viento de 3,5 metros por segundo durante el vuelo.
Aterrizajes suaves y estables sin rebotes
Los saltos altos suelen implicar aterrizajes duros, que pueden dañar el hardware o hacer que un robot salga rodando. GravOff aborda esto con dos modos de aterrizaje. Para impactos especialmente fuertes, un amortiguador blando impreso en 3D en cada pierna ayuda a absorber la energía. Para aterrizajes precisos sobre objetivos pequeños o en movimiento, el robot retrae activamente las patas y luego las vuelve a extender en el momento justo, alargando el tiempo de contacto con el suelo. Este “amortiguado activo” reduce las fuerzas de impacto por un factor de cuatro en comparación con un aterrizaje pasivo y prácticamente cancela el momento entrante, de modo que el robot se detiene en el primer toque en vez de rebotar.
De saltos de laboratorio a misiones en el mundo real
Más allá de las pruebas controladas en interiores, los autores muestran que GravOff puede combinar saltos con reptar y rodar para afrontar terreno real. Puede arrastrarse lentamente sobre hierba, arena, adoquines y pavimento ranurado para alinearse en una postura de despegue segura, y luego usar saltos en hipogravedad para superar obstáculos como escaleras de varios peldaños, un muro de 2,35 metros de altura o un arroyo de tres metros de anchura. La estrategia de saltos con baja gravedad también resulta mucho más eficiente energéticamente que el vuelo puro para salvar obstáculos de tamaño medio: en algunas pruebas, los saltos consumieron menos de una décima parte de la energía total requerida por mantenerse en hover o volar sobre la misma barrera.
Qué significa esto para los robots del futuro
En términos sencillos, este trabajo demuestra que los robots pueden saltar más lejos, con mayor precisión y con más seguridad al simular que la gravedad es menor y ajustando su trayectoria en vuelo tras el despegue. El diseño de GravOff insinúa futuros exploradores que podrían brincar sobre escombros durante operaciones de rescate o recorrer acantilados y cráteres en otros planetas, todo mientras predicen exactamente dónde y cuándo aterrizarán. Las mismas ideas—compensar la gravedad con empuje y dirigir la parábola en vuelo—podrían añadirse a muchos otros robots saltadores, convirtiendo el salto en un modo de desplazamiento fiable y planificable en lugar de un recurso arriesgado de último recurso.
Cita: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Palabras clave: robots saltadores, hipogravedad, vectorización de empuje, locomoción con patas, control de trayectoria