Clear Sky Science · es
Arquitectura de picos bioinspirada permite codificación táctil con restricciones energéticas
Por qué un tacto más inteligente importa para los robots
Nuestras yemas nos permiten sentir un grano de arena, un vaso que se desliza o un toque suave en una fracción de segundo, todo ello usando muy poca energía. A medida que los robots salen de las fábricas y entran en hogares, hospitales y entornos de trabajo concurridos, necesitarán un sentido del tacto similar para interactuar con seguridad con personas y objetos frágiles. Este estudio presenta una nueva piel artificial y un sistema de procesamiento inspirado en el cerebro que permite a las máquinas detectar con alta precisión dónde están siendo tocadas, manteniendo al mismo tiempo un consumo energético extremadamente bajo —un requisito clave para los futuros robots móviles y colaborativos.
Una piel flexible que siente como la nuestra
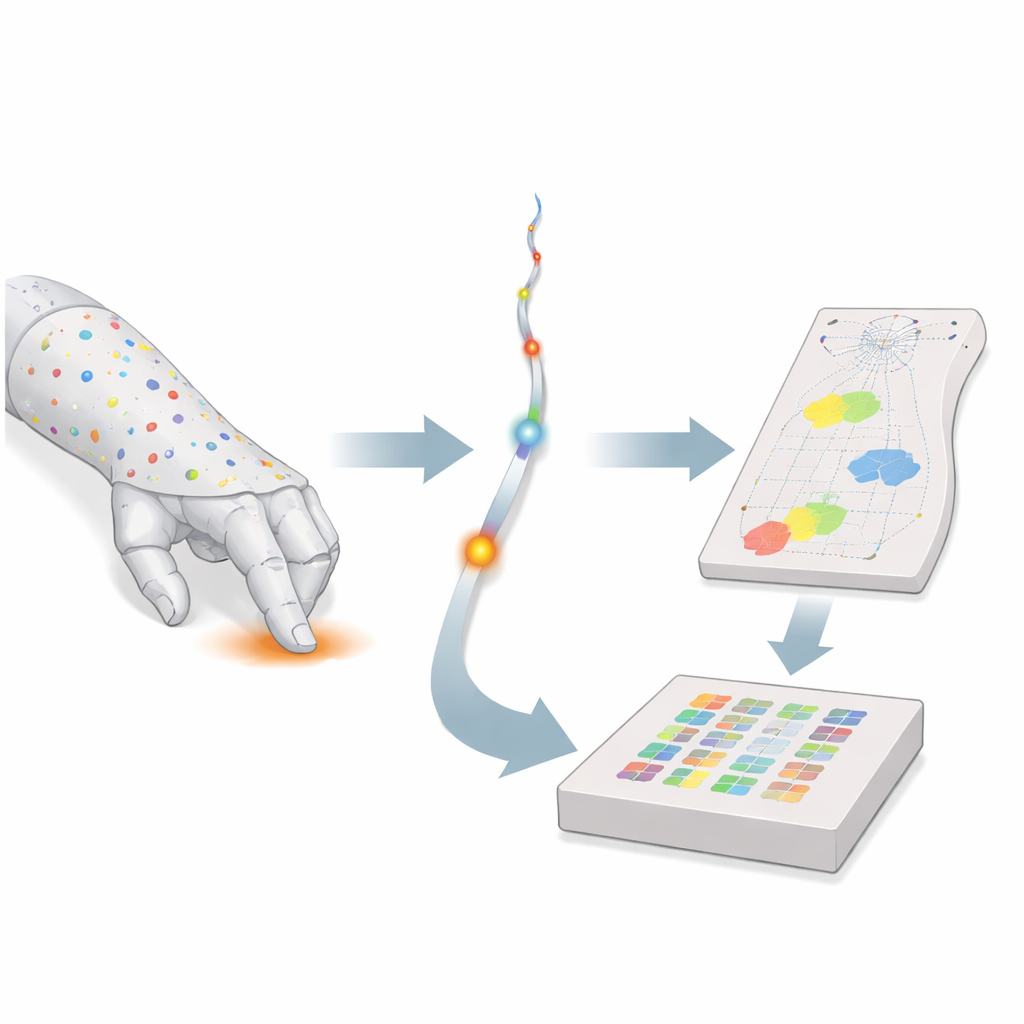
Los investigadores construyeron una “e-piel” blanda de silicona con la forma de un antebrazo humano y la recorrieron con 21 diminutos sensores ópticos a lo largo de una única fibra tan fina como un cabello. Estos sensores, llamados rejillas de Bragg en fibra (Fiber Bragg Gratings), responden al estiramiento y la flexión de la piel cambiando el color de la luz reflejada dentro de la fibra. Como la fibra serpentea bajo la superficie, cada sensor es sensible no solo a un punto único sino a una pequeña región, de forma similar a los receptores táctiles reales distribuidos en nuestra piel. Algunos de estos receptores artificiales reaccionan con fuerza a presiones muy locales, mientras que otros responden más ampliamente a deformaciones, reflejando cómo diferentes terminaciones nerviosas en la piel humana captan tanto los detalles finos como la forma general.
Convertir el tacto en picos eléctricos
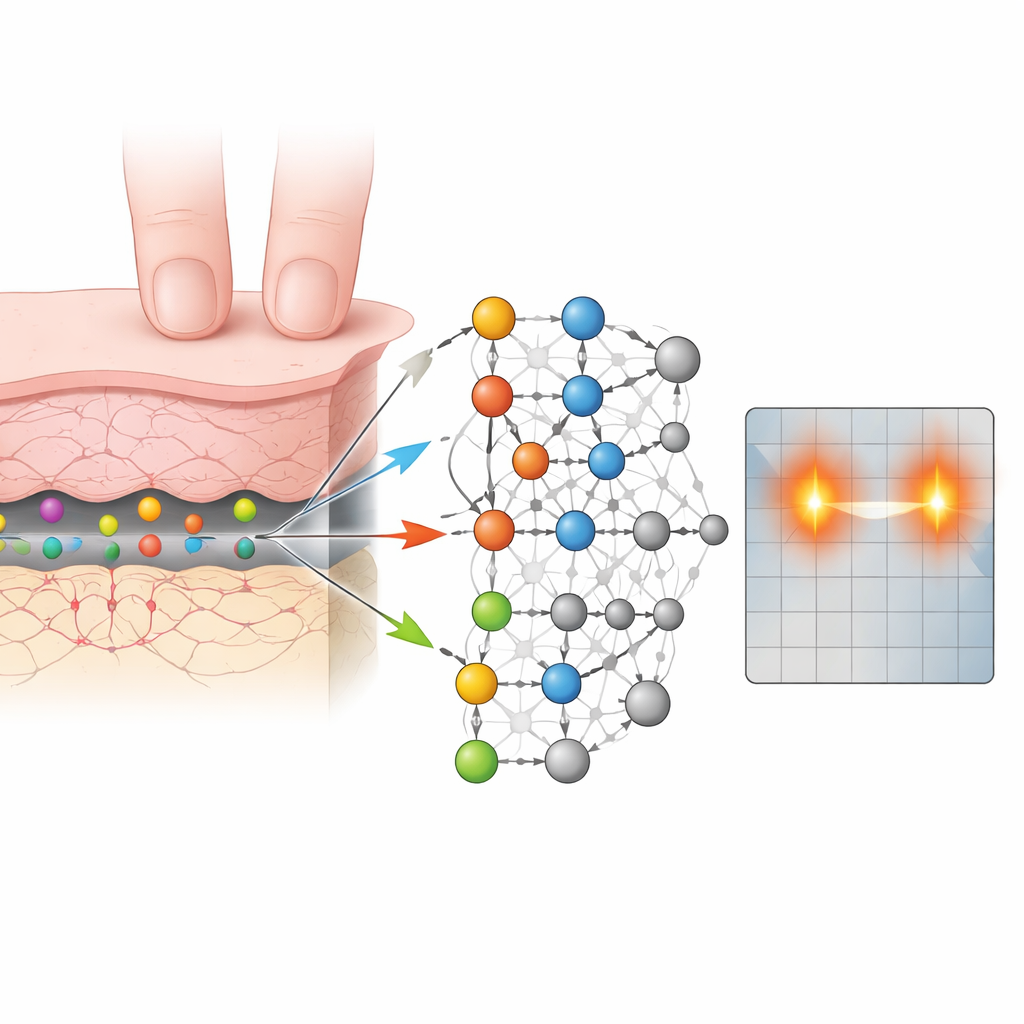
Para interpretar este rico flujo de datos, el equipo no recurrió a modelos convencionales de aprendizaje profundo que procesan tramas de números. En su lugar, imitaron la biología más de cerca usando una red neuronal de picos, donde la información viaja en breves pulsos eléctricos, o “picos”, similares a los impulsos nerviosos. Las señales ópticas de la e-piel se convierten en flujos de picos y se envían a la red. Cada neurona de salida en esta red representa un punto específico de la piel, formando un mapa interno bidimensional de la superficie. Cuando algo toca la e-piel, un conjunto de neuronas emite picos en un patrón que revela dónde ocurrió el contacto, y el sistema calcula la ubicación del toque a partir del centro de esa actividad.
Un tacto más preciso con menos recursos
Con este diseño, el sistema localiza puntos de contacto individuales en el antebrazo artificial con un error típico de unos tres milímetros, superando a una sólida referencia de aprendizaje profundo en aproximadamente un tercio y logrando una resolución espacial unas diez veces mejor de lo que cabría esperar solo por el espaciado de los sensores. También funciona cuando se presionan varios puntos a la vez, hasta cuatro contactos simultáneos, y cuando las presiones se aplican manualmente con fuerzas y direcciones variables. Los investigadores exploraron distintos patrones de cableado interno en la red y encontraron que una disposición inspirada en las vías táctiles tempranas de la médula espinal —donde células excitatorias alimentan interneuronas inhibitorias que suprimen salidas vecinas— es crucial para afinar el detalle espacial. Esta “inhibición lateral” ayuda a mantener la representación nítida, evitando el desenfoque cuando los contactos están muy cerca.
Diseñado para baja energía, no solo para precisión
Un objetivo central del trabajo es mantener el consumo energético bajo control, un problema que se vuelve crítico si todo el cuerpo de un robot estuviera cubierto de sensores. El equipo entrenó la red bajo una presión creciente para disparar menos picos, imitando la necesidad evolutiva de sacrificar rendimiento bruto frente al coste metabólico. En condiciones sin restricciones, una arquitectura más flexible y menos realista biológicamente rindió algo mejor. Pero una vez que la actividad de picos se redujo a niveles energéticamente eficientes, la disposición bioinspirada resultó ganadora, ofreciendo mayor precisión con el mismo presupuesto de actividad. Luego los investigadores trasladaron esta red a un chip neuromórfico de señal mixta que implementa neuronas y sinapsis directamente en electrónica analógica. En este hardware, el sistema táctil funcionó con potencia submiliwatt durante el contacto y solo unos pocos microwatios en reposo, con una pérdida mínima de precisión.
De antebrazos de laboratorio a futuros cuerpos robóticos
En conjunto, este trabajo demuestra que combinar cuidadosamente sensado suave y distribuido con cómputo por picos similar al cerebral puede proporcionar a las máquinas un sentido del tacto preciso y rápido sin una factura energética elevada. Al igualar no solo el rendimiento sino también los principios de cableado de las vías táctiles tempranas del sistema nervioso, el sistema sugiere por qué la evolución puede haber favorecido ciertos motivos de circuito: ofrecen una precisión suficiente bajo límites energéticos estrictos. Escaladas, pieles electrónicas y procesadores neuromórficos similares podrían permitir que robots y dispositivos protésicos sientan el contacto en sus superficies, reaccionen con rapidez a golpes inesperados e interactúen de forma más segura y natural en los entornos complejos y dinámicos donde viven y trabajan las personas.
Cita: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Palabras clave: piel artificial, sensado táctil, redes neuronales de picos, hardware neuromórfico, seguridad en robótica