Clear Sky Science · es
Electrodos basados en hidrogel para adquisición sEMG de alta fidelidad y control de mano robótica
Escuchar a los músculos para mover máquinas
Imagínese controlar una mano robótica simplemente tensando sus propios músculos. Para personas que han perdido la función de la mano, o para trabajadores que necesitan asistencia robótica precisa, este tipo de vínculo sin esfuerzo entre cuerpo y máquina podría cambiar la vida. Pero los electrodos metálicos adhesivos actuales son rígidos, pueden irritar la piel y con frecuencia producen lecturas eléctricas ruidosas. Este artículo presenta un electrodo blando y compatible con la piel, “tipo gelatina”, que se adapta al cuerpo, capta señales musculares muy pequeñas con mayor claridad y las usa para dirigir una mano robótica realista.
Un parche suave que se siente como piel
Los investigadores diseñaron un nuevo hidrogel—un material elástico y rico en agua similar a las lentes de contacto—para actuar como electrodo sobre la piel. Combinaban bloques constructores comunes en plásticos con aditivos naturales como la quitosana (derivada de crustáceos) y el ácido tánico (presente en plantas), además de glicerol y sales sencillas. Juntos, estos ingredientes crean una red elástica conductora de iones que puede transportar cargas eléctricas mientras permanece blanda y húmeda contra la piel. Al ajustar finamente la cantidad de cada componente, el equipo produjo una versión que puede estirarse más de doce veces su longitud original sin romperse y mantener un rendimiento eléctrico fiable.
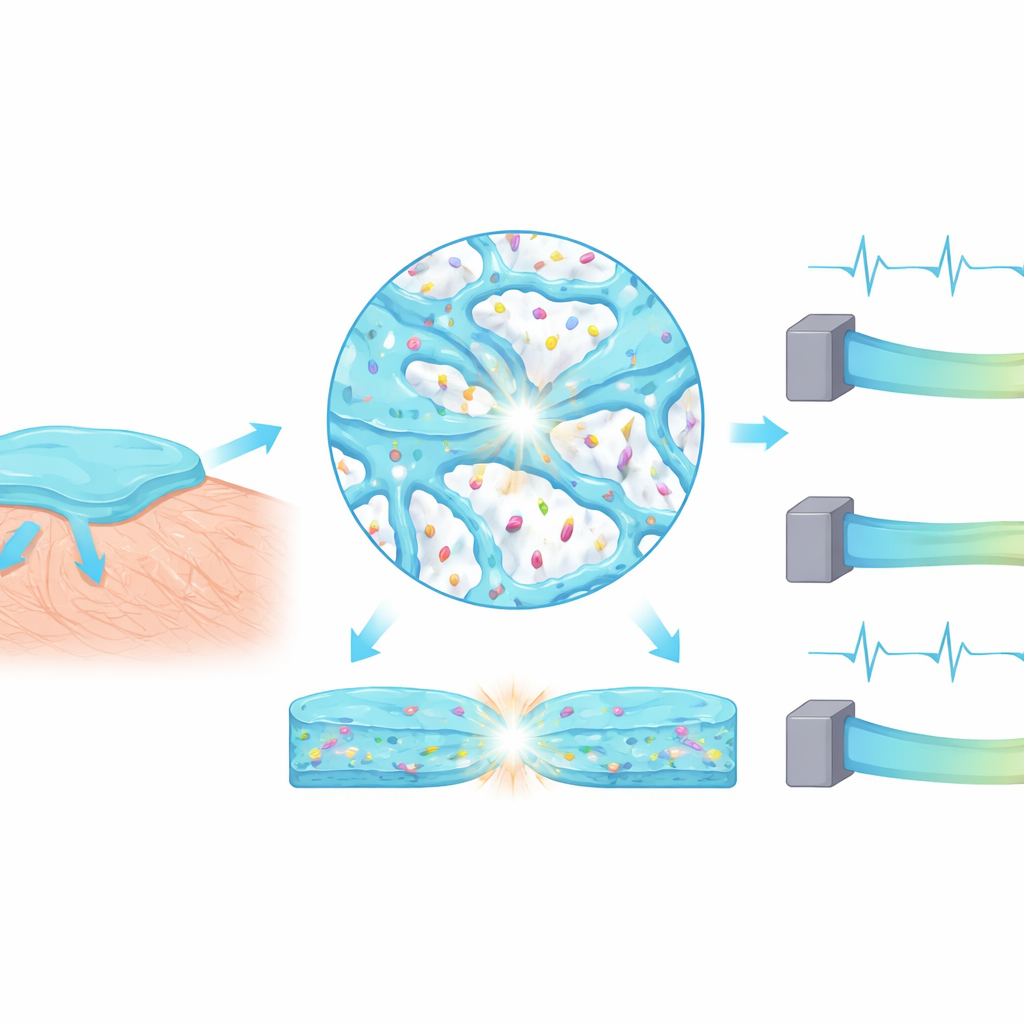
Fuerte, adhesiva y capaz de autorrepararse
Para funcionar bien en un brazo o mano en movimiento, un electrodo debe mantenerse en su lugar, resistir doblados y tirones, y seguir operando incluso después de daños menores. El nuevo hidrogel sobresale en las tres áreas. Bajo el microscopio muestra una estructura densa y esponjosa formada por muchos enlaces débiles entre sus moléculas. Esos enlaces actúan como amortiguadores, permitiendo que el material se estire, gire y comprima y vuelva a su forma. También permiten que piezas cortadas del gel se reconecten con el tiempo; cuando el equipo cortó una muestra por la mitad y juntó los trozos, se curó gradualmente y recuperó casi toda su conductividad eléctrica original. Mientras tanto, los grupos químicos del ácido tánico confieren al gel una adhesión fuerte a muchas superficies, desde plásticos y metales hasta piel de cerdo real y piel humana, y esa pegajosidad sigue siendo efectiva incluso después de docenas de ciclos de adherir–despegar.
Señales más limpias de músculos en trabajo
El siguiente paso fue ver qué tan bien el gel blando podía captar señales de electromiografía de superficie (sEMG)—las débiles tensiones producidas por los músculos justo debajo de la piel. Los investigadores colocaron electrodos de hidrogel en los antebrazos de voluntarios y los compararon con parches comerciales de plata/cloruro de plata del mismo tamaño. Durante tareas simples como apretar y relajar un puño, ambos tipos de electrodos registraron formas de onda claras, pero el hidrogel ofreció una relación señal‑ruido notablemente mayor. En términos prácticos, esto significa que las señales musculares deseadas destacaban con más nitidez frente al ruido eléctrico de fondo, y las lecturas se mantenían más estables cuando los electrodos se movían o se reutilizaban. Incluso tras múltiples reaplicaciones o cortes deliberados seguidos de autorreparación, los parches de hidrogel continuaron captando señales de alta calidad, superando a los parches rígidos basados en metal.
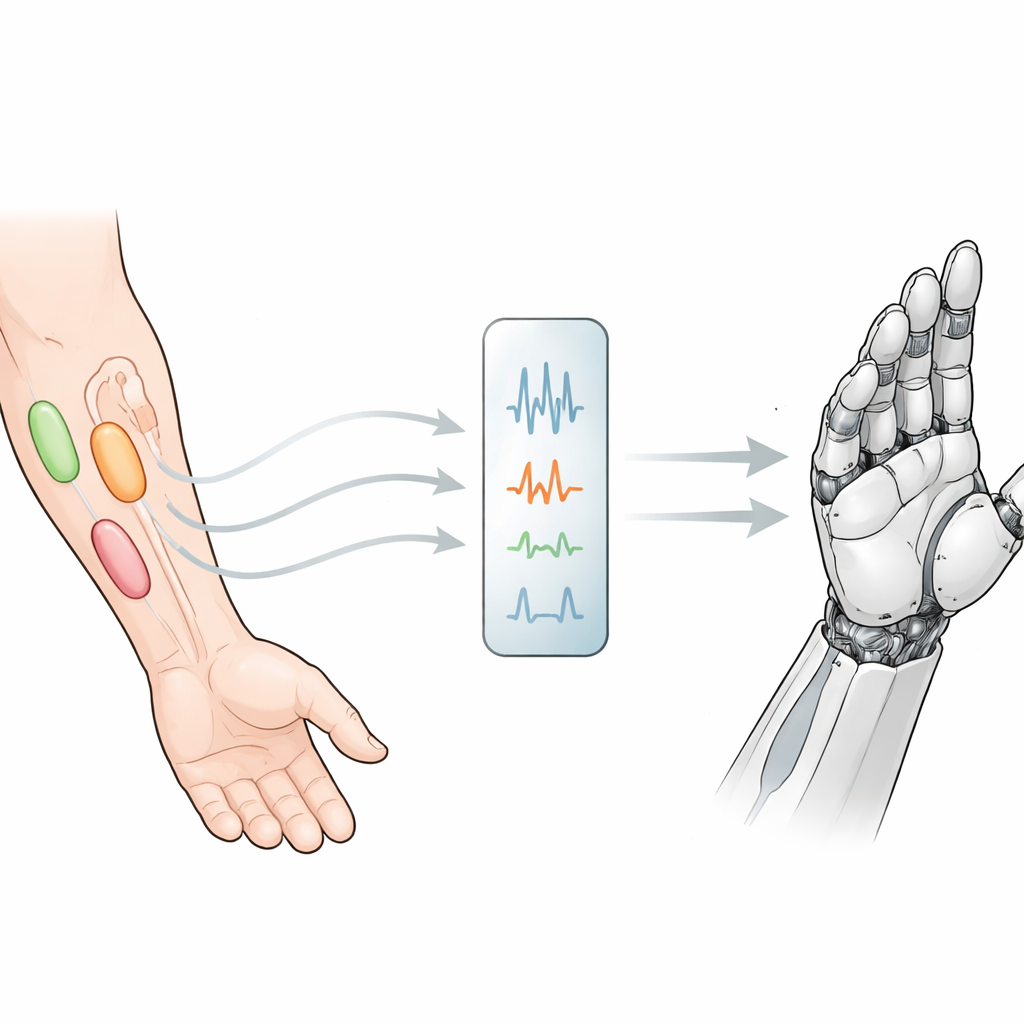
Enseñar a una mano robótica a leer gestos
Con señales musculares más limpias en mano, el equipo construyó un sistema completo que convierte esas señales en gestos de la mano distintos. Montaron electrodos de hidrogel integrados sobre los músculos flexores y extensores del antebrazo y registraron patrones eléctricos mientras los voluntarios realizaban cinco gestos comunes, como la señal de “OK”, pulgar hacia arriba, mano abierta, señalar y puño cerrado. A partir de esas grabaciones, los investigadores extrajeron características estadísticas sencillas—qué tan fuertes, qué tan estables y qué tan rápidamente cambiaban las señales—y las introdujeron en un modelo informático. Usaron un algoritmo que combina una red neuronal de aprendizaje rápido con un método de optimización inspirado en bandadas de aves. Esta combinación permitió al sistema aprender con rapidez qué patrones musculares corresponden a cada gesto con alta precisión.
De comandos parecidos a pensamientos a movimiento real
Finalmente, el equipo vinculó su software de reconocimiento a una mano robótica biomimética. Cuando un voluntario formaba uno de los gestos entrenados, los electrodos de hidrogel captaban las señales sEMG, el algoritmo identificaba el gesto pretendido y la mano robótica reproducía el movimiento en tiempo real. En muchas pruebas, el sistema clasificó los gestos correctamente más del 94% de las veces, a pesar de basarse solo en un conjunto reducido de características sencillas de la señal. Para un lector no especializado, la conclusión es clara: un parche de gel blando, autorreparable y adhesivo puede escuchar la actividad muscular a través de la piel de forma más cómoda y más clara que los parches metálicos convencionales, permitiendo un control fiable de robots asistenciales. Este enfoque podría sustentar futuras manos protésicas, herramientas de rehabilitación y dispositivos vestibles que respondan de forma natural al lenguaje eléctrico propio del cuerpo.
Cita: Yu, Z., Gu, Y., Ren, Y. et al. Hydrogel-based electrodes for high-fidelity sEMG acquisition and robotic hand control. Microsyst Nanoeng 12, 107 (2026). https://doi.org/10.1038/s41378-026-01219-y
Palabras clave: electrodos de hidrogel, electromiografía de superficie, sensores vestibles, reconocimiento de gestos, control de mano robótica