Clear Sky Science · es
Un robot de escala insectoide con patas paralelas basado en un mecanismo origami que integra actuadores y estructura
Pequeños robots para espacios reducidos
Imagine un robot de rescate lo suficientemente pequeño y ligero como para colarse por una pared agrietada, deslizarse por una tubería estrecha o incluso nadar a través de un charco. Este artículo presenta precisamente esa máquina: un robot del tamaño de la palma de la mano, similar a un insecto, llamado PLioBot, que se fabrica a partir de una sola lámina plegada, se desplaza muy rápido para su tamaño y afronta muchos tipos de terrenos irregulares. Los investigadores muestran cómo combinar pliegues ingeniosos con diminutos motores vibratorios puede transformar materiales planos en exploradores ágiles para lugares angostos y difíciles de alcanzar.
De una lámina plana a un rastreador de cuatro patas
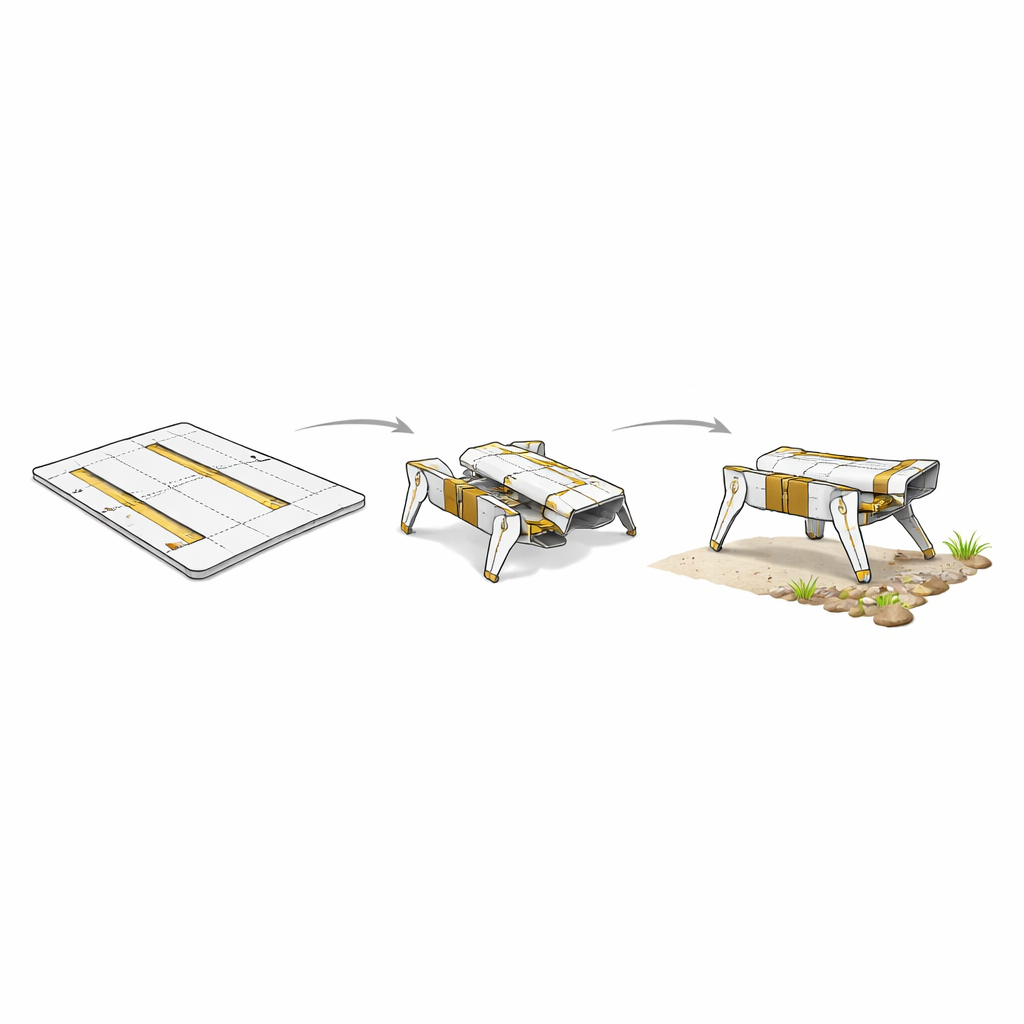
PLioBot nace como un patrón plano, parecido a un juguete de papel recortable y plegable. En lugar de papel, el patrón es un sándwich de cinco capas formado por fibra de vidrio, fibra de carbono, una película plástica flexible y tiras de cerámica piezoeléctrica que actúan como músculos. Regiones delgadas colocadas con precisión en la capa plástica sirven de bisagras. Tras el corte por láser, toda la estructura se pliega en una secuencia coreografiada de modo que el cuerpo, las cuatro patas y los ocho actuadores emergen de una pieza continua. No se necesitan tornillos, motores separados ni alineación manual: solo el plegado produce un robot completo de aproximadamente 2,5 centímetros de largo y con un peso de solo 1,2 gramos.
Cómo las patas diminutas logran grandes zancadas
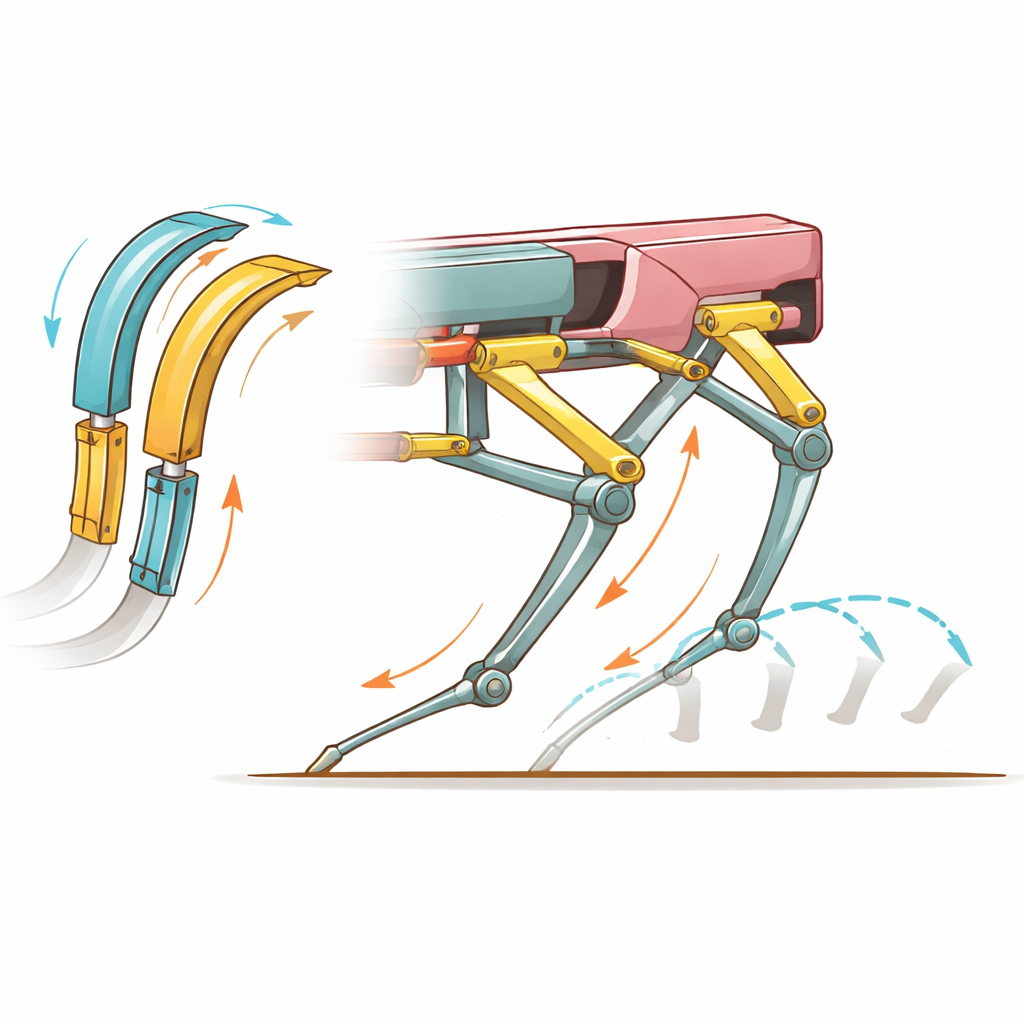
El movimiento del robot proviene de las cerámicas piezoeléctricas, materiales que se doblan ligeramente cuando se aplica una tensión eléctrica. Cada lado de PLioBot lleva un par de actuadores en tira “gemelos”. Cuando tensiones alternas hacen que esas tiras se flexionen adelante y atrás, su movimiento se transmite mediante un conjunto de articulaciones que funcionan como un pequeño mecanismo paralelo de patas. Al sincronizar cuidadosamente las señales, cada pata puede moverse arriba y abajo así como hacia adelante y hacia atrás, trazando una trayectoria en bucle con su pie. Coordinar las cuatro patas en un patrón similar al galope permite al robot empujar contra el suelo de manera eficiente y avanzar con rapidez. En sus ajustes óptimos, PLioBot alcanza 44,6 centímetros por segundo —alrededor de 18 longitudes corporales por segundo— lo que lo sitúa entre los robots con patas más veloces a esta escala.
Músculos integrados y menos dolores de cabeza en el montaje
La mayoría de los robots a escala insectoide se ensamblan laboriosamente a partir de muchas piezas diminutas: motores o actuadores separados, estructuras y enlaces que deben alinearse a mano. Eso incrementa el coste, limita la precisión y dificulta la producción en masa. Los autores abordan este problema integrando por completo la estructura y la actuación en un único “mecanismo origami”. Emplean un proceso de laminado refinado en el que todas las capas —cubiertas rígidas de fibra de vidrio, electrodos de fibra de carbono ortogonales, la película flexible para bisagras y las tiras cerámicas— se cortan, apilan, alinean mediante orificios de clavija y se prensan en caliente antes de liberar el contorno final por láser. El resultado es un en blanco plano y robusto que ya contiene el esqueleto, las articulaciones y los músculos del robot en sus posiciones finales, listo para plegarse en su forma definitiva.
Caminar, trepar y nadar en terrenos del mundo real
Para comprobar si su diseño es útil fuera de la bancada de laboratorio, el equipo puso a PLioBot a prueba con una variedad de obstáculos cotidianos. Sobre vidrio liso corre el riesgo de resbalar, pero aun así se desplaza rápidamente; sobre esponja y acrílico gana tracción a costa de algo de velocidad. Sube rampas de hasta 12 grados y puede transportar cargas más pesadas que él mismo —hasta 1,7 gramos— con un rendimiento especialmente bueno por debajo de aproximadamente 0,8 gramos. En túneles estrechos de solo 3 centímetros de ancho y menos de 3 centímetros de alto, el robot transporta una carga de 1,4 gramos manteniendo varias longitudes corporales por segundo. Al cambiar las almohadillas de los pies por hemisferas o aletas tipo pala, PLioBot atraviesa grava y hierba, cruza arenas movedizas sin hundirse, camina por el fondo de un tanque e incluso nada en la superficie del agua usando solo sus aletas para generar empuje.
Qué significa esto para futuros pequeños exploradores
En términos sencillos, este trabajo demuestra que se puede imprimir y plegar un robot muy pequeño cuyo cuerpo y músculos son una sola pieza, y que este robot puede moverse con rapidez y manejar muchas superficies desordenadas del mundo real. PLioBot aún depende de cables de alimentación externos, por lo que no es todavía totalmente independiente. Pero el diseño origami integrado y el método de fabricación apuntan hacia un futuro en el que grandes cantidades de robots baratos a escala insectoide podrían producirse como piezas planas, plegarse en su forma final y equiparse con baterías y circuitos de control en miniatura. Tales enjambres podrían algún día explorar edificios dañados, inspeccionar tuberías industriales o explorar otros planetas, todo partiendo de algo que al principio parece, simplemente, una lámina inteligentemente recortada.
Cita: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Palabras clave: robots a escala insectoide, robótica origami, actuadores piezoeléctricos, locomoción adaptativa al terreno, fabricación de micro-robots