Clear Sky Science · es
Actuadores de aleación con memoria de forma en forma de hilo: modelado, diseño y control
Hilos metálicos que "recuerdan" su forma
Imagine un alambre metálico fino que puede tirar como un músculo, doblar silenciosamente el dedo de un robot, remodelar el ala de un avión en vuelo o apretar con delicadeza un corazón que falla —todo con solo calentarlo y enfriarlo. Este artículo de revisión examina esos hilos, fabricados con aleaciones con memoria de forma (AMF), y explica cómo funcionan, cómo los ingenieros los diseñan y controlan, y dónde ya se están usando en el mundo real: robots, aeronaves, dispositivos médicos y tecnología vestible.
Cómo cobran vida los hilos metálicos inteligentes
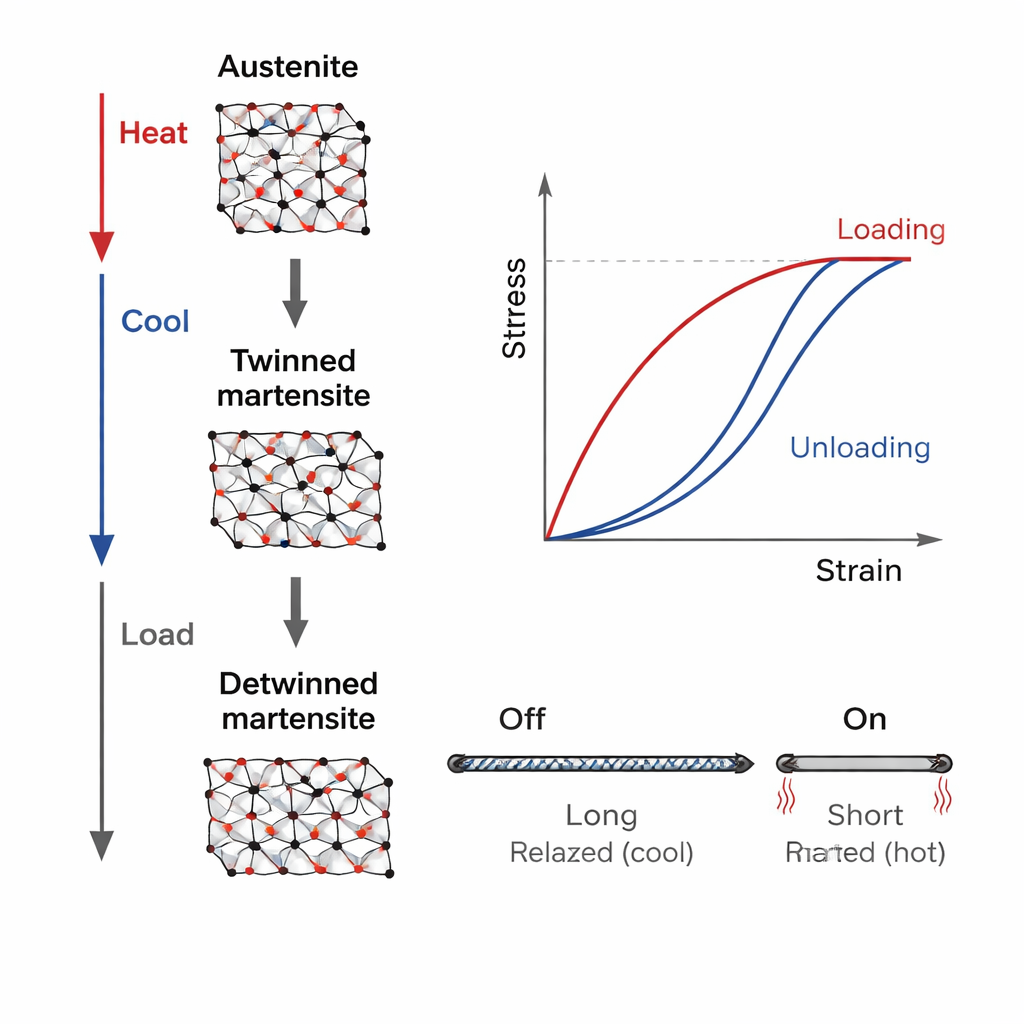
Las aleaciones con memoria de forma son metales especiales que pueden deformarse y luego volver a una forma preestablecida cuando cambia su temperatura. En un modo, llamado efecto memoria de forma, puede doblar el hilo cuando está frío y relativamente blando; al calentarlo, recupera su forma original. En otro modo, la superelasticidad, la aleación puede estirarse bajo carga y luego volver a su forma una vez que se retira la carga. En el interior del metal, este comportamiento proviene de cambios de fase sólido–sólido entre diferentes ordenaciones cristalinas, lo que hace que su respuesta sea altamente no lineal y algo difícil de predecir. Debido a que los hilos de AMF son delgados, los ingenieros suelen tratarlos como elementos unidimensionales, lo que simplifica los modelos matemáticos que describen cómo se relacionan la temperatura, la tensión, la deformación y la corriente eléctrica.
De las ecuaciones a los modelos basados en datos
Para usar estos hilos inteligentes de forma fiable, los diseñadores necesitan modelos que predigan cuánto pueden tirar, cuánto se desplazan, qué temperatura alcanzan y cómo cambia su resistencia eléctrica. Los modelos constitutivos clásicos tratan el hilo como un material continuo y siguen cómo cambian sus fases internas con la tensión y la temperatura. Estos modelos son eficientes pero dependen de suposiciones simplificadoras. Paralelamente, los investigadores usan cada vez más aprendizaje automático y redes neuronales para aprender el comportamiento del hilo directamente a partir de datos experimentales, capturando sutiles efectos de histéresis e historia. Otra línea importante de trabajo examina cómo evolucionan la resistencia eléctrica y la temperatura del hilo durante el calentamiento por corriente, lo que posibilita la auto-detección: la capacidad de estimar fuerza o movimiento midiendo la resistencia en lugar de añadir sensores separados.
Construyendo movimiento: cargas simples, estructuras blandas y músculos artificiales
En el lado del hardware, el artículo organiza los actuadores de AMF en hilo según cómo se cargan. En los montajes más simples de "carga lineal", un hilo tira contra un muelle o un peso para accionar pinzas o mecanismos de liberación espacial. Los sistemas de "carga no lineal" más avanzados integran hilos en vigas flexibles, polímeros blandos, textiles o estructuras tipo origami para lograr grandes movimientos de flexión, robots que se desplazan por reptación y guantes exoesqueléticos tejidos. Las configuraciones diferenciales usan dos o más hilos opuestos, imitando pares de músculos como bíceps y tríceps, para proporcionar movimiento reversible y rápido en articulaciones como codos y tobillos artificiales. Dado que un hilo de AMF solo puede acortarse aproximadamente un 8 %, un tema de diseño clave es la amplificación del recorrido: enrollar hilos largos alrededor de poleas, disponerlos en trayectorias curvas, usar etapas modulares deslizantes o giratorias, o adoptar resortes de AMF para lograr mayores desplazamientos en espacios reducidos.
Enseñar a los hilos inteligentes a obedecer
Controlar estos actuadores es un reto porque su respuesta depende tanto de la temperatura como de la historia mecánica. El artículo revisa un espectro de estrategias de control, desde controladores PID clásicos hasta esquemas más sofisticados. Los enfoques basados en modelos usan ecuaciones derivadas de la física o modelos de histéresis para diseñar controladores por modo deslizante y compensadores feedforward que contrarrestan la no linealidad. Los controladores con redes neuronales y aprendizaje por refuerzo van más allá, aprendiendo cómo accionar el hilo para obtener un movimiento preciso sin depender de modelos perfectos. Al mismo tiempo, los métodos de control con auto-detección usan el cambio de resistencia del hilo como señal de retroalimentación integrada, a veces combinado con redes neuronales, para estimar posición o fuerza sin sensores externos voluminosos.
Usos reales y direcciones futuras
Los actuadores de AMF en hilo ya impulsan pinzas robóticas blandas, pequeños robots que se arrastran, alas de aeronaves morfables, dispositivos de liberación para satélites, bombas y stents implantables, envolturas de asistencia cardíaca, prendas de compresión, trajes exoesqueléticos y guantes de rehabilitación. En todos estos campos persisten obstáculos comunes: refrigeración lenta y acumulación de calor, fatiga tras muchos ciclos, complejidad de control y coste de fabricación. Los autores sostienen que el progreso dependerá de integrar tres hilos: mejores modelos multiescala y enriquecidos con datos, diseños estructurales más inteligentes que combinen AMF con electrónica flexible y materiales multifuncionales, y estrategias de control inteligentes que se adapten en línea. Imaginan marcos unificados de “modelado–diseño–control”, apoyados por gemelos digitales y aprendizaje automático, que puedan cooptimizar estos aspectos conjuntamente. Para el lector no especializado, el mensaje es que estos hilos que cambian de forma están madurando de curiosidades de laboratorio a músculos artificiales prácticos, con el potencial de remodelar silenciosamente máquinas, dispositivos médicos y sistemas vestibles en los próximos años.
Cita: Zhang, R., Yue, H., Sun, H. et al. Wire-form shape memory alloy actuators: modeling, design, and control. Microsyst Nanoeng 12, 76 (2026). https://doi.org/10.1038/s41378-026-01161-z
Palabras clave: aleación con memoria de forma, robotica blanda, actuadores inteligentes, estructuras morfables, dispositivos vestibles