Clear Sky Science · es
Un marco de Gaussian splatting impulsado por dos priors para la reconstrucción de alta fidelidad de artefactos de museo
Por qué importa preservar los objetos en 3D
Museos de todo el mundo compiten por crear copias digitales detalladas de objetos frágiles, desde campanas de bronce hasta jarrones de porcelana. Estos sustitutos virtuales pueden explorarse en línea, estudiarse sin manipular los originales y conservarse incluso si los objetos físicos se deterioran. Pero muchas colecciones solo disponen de datos de escaneo 3D en crudo guardados como nubes de puntos coloreadas —millones de puntos en el espacio— sin fotografías coincidentes. Este artículo presenta una nueva forma de convertir esos puntos por sí solos en modelos 3D realistas, abriendo vastos archivos de datos patrimoniales “dormidos” a una exhibición digital vívida.
El problema con las réplicas digitales actuales
Hasta ahora, las reconstrucciones 3D de alta calidad han seguido típicamente dos vías. Una utiliza fotografías convencionales desde muchos ángulos para estimar forma y color, pero falla en superficies lisas y de baja textura, comunes en objetos de museo, y no recupera fácilmente la escala real. La otra emplea escáneres láser precisos para capturar la geometría directamente, a veces con cámaras separadas para el color. Esa ruta es exacta pero cara, y aun así no produce directamente los tipos de renderizados ricos y con iluminación que demandan las exposiciones virtuales modernas. Una técnica más reciente, llamada Gaussian splatting 3D, puede renderizar escenas en tiempo real con realismo impresionante, pero normalmente depende de imágenes de cámara y de una nube de puntos inicial construida a partir de esas imágenes. Para objetos de museo archivados solo como nubes de puntos, toda esa cadena se rompe.
Una nueva vía desde puntos hasta duplicados digitales
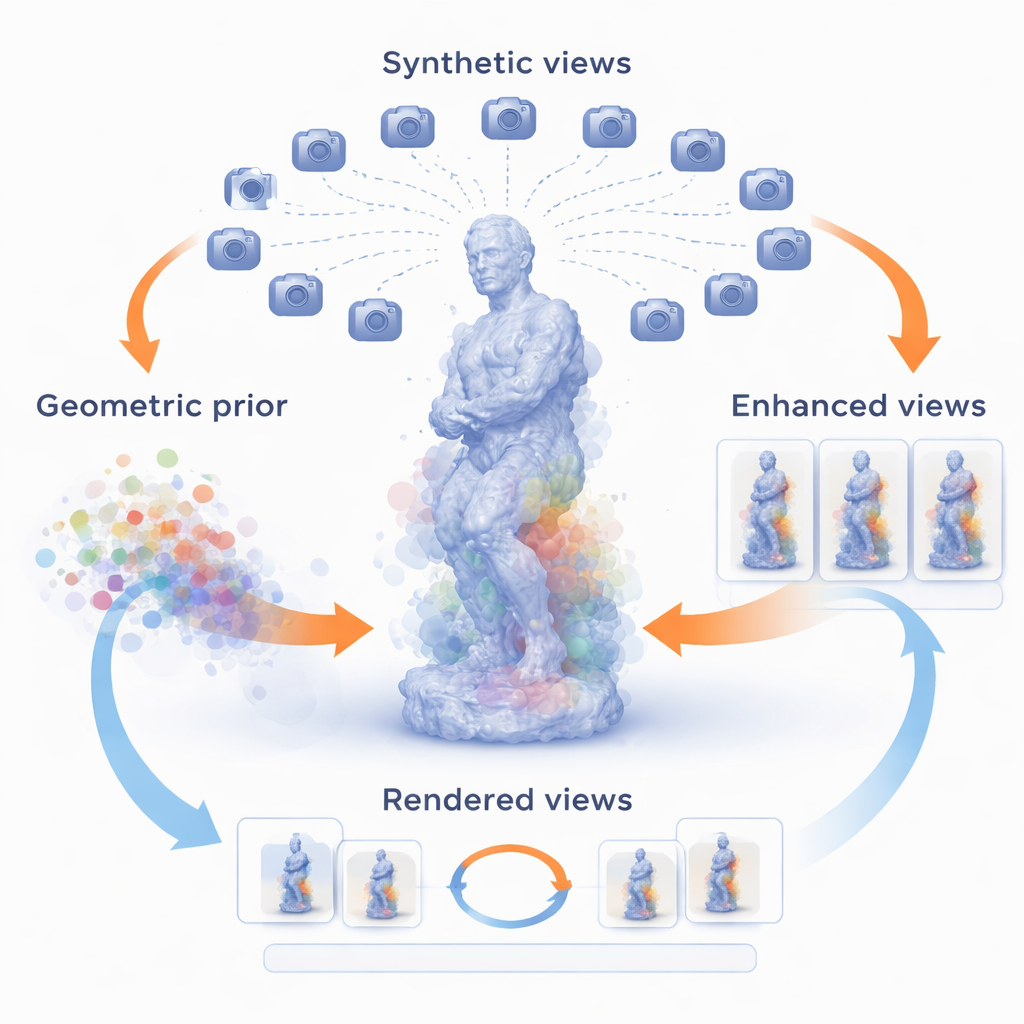
Los autores proponen un marco “de doble prior” que parte de una nube de puntos coloreada de alta calidad y llega a un modelo detallado listo para renderizar —sin necesitar fotografías originales. El primer prior es geométrico: un método de muestreo inteligente recorre el escaneo denso, midiendo tanto la variación de forma como de color en múltiples escalas. Los puntos que capturan bordes de superficie, tallas, grietas o cambios bruscos de color reciben mayor importancia, mientras que las regiones planas o uniformes se adelgazan. Un subconjunto cuidadosamente elegido de puntos se emplea para inicializar millones de pequeños bloques 3D, llamados primitivos Gaussianos, que constituyen la columna vertebral del modelo final y conservan la escala real del mundo.

Enseñar al modelo cómo debe lucir el objeto
El segundo prior es visual: en lugar de usar fotografías reales, el método genera imágenes de entrenamiento “ideales” directamente desde la nube de puntos. Se colocan cámaras virtuales alrededor del objeto, incluyendo ángulos que podrían ser difíciles en una galería real, y cada punto se proyecta en estas vistas para crear imágenes sintéticas en color. Un algoritmo de visibilidad elimina los puntos que deberían estar ocultos desde un ángulo dado, evitando el fantasmado donde detalles de fondo aparecen erróneamente en primer plano. Como las imágenes y la geometría provienen de la misma fuente, no hay desalineación entre forma y color —un dolor de cabeza frecuente en flujos de trabajo tradicionales que combinan escaneos y conjuntos de fotos separados.
Limpiar y afinar las vistas sintéticas
Las proyecciones crudas desde puntos tienden a verse dentadas en los bordes y algo borrosas en detalles finos. Para corregirlo, las imágenes sintéticas pasan por un paso de antialiasing que suaviza los contornos “escalonados” manteniendo los patrones, y luego por una red de superresolución basada en transformadores. Esta red trata las múltiples vistas como fotogramas de un vídeo y aprende a tomar pequeños detalles prestados de imágenes vecinas que ven la misma área desde ángulos ligeramente diferentes. El resultado es un conjunto de vistas nítidas y de alta resolución que sirven como una señal de enseñanza sólida: el modelo 3D Gaussiano se renderiza y ajusta repetidamente para que sus salidas coincidan con estas imágenes mejoradas lo más posible.
Qué significa esto para los museos y más allá
Pruebas en un nuevo conjunto de datos de patrimonio cultural y en benchmarks 3D estándar muestran que este enfoque de doble prior produce renderizados más claros y precisos que varias variantes líderes de Gaussian splatting, con una recuperación notablemente mejor de decoraciones delicadas y una forma global más fiel. Para museos que ya poseen nubes de puntos precisas pero carecen de fotografías utilizables, el método ofrece una forma práctica de insuflar nueva vida a escaneos antiguos, convirtiéndolos en sustitutos digitales interactivos aptos para exposiciones, educación e investigación. La principal salvedad es que el enfoque asume que los escaneos originales son densos y completos: si los datos son escasos o están muy corruptos, los beneficios se atenúan. Aun así, para las muchas colecciones que cumplen ese requisito, el marco proporciona un puente potente desde mediciones en crudo hasta artefactos virtuales convincentes.
Cita: He, Y., Zhang, X., Xie, Z. et al. A dual-prior driven Gaussian splatting framework for high-fidelity reconstruction of museum artifacts. npj Herit. Sci. 14, 69 (2026). https://doi.org/10.1038/s40494-026-02330-z
Palabras clave: patrimonio digital, reconstrucción 3D, nubes de puntos, Gaussian splatting, artefactos de museo