Clear Sky Science · en
Behavioral evidence for the hierarchical execution of sequential movements
How Our Brains Turn Simple Moves into Fluid Actions
Everyday tasks like typing on a keyboard, playing a piano scale, or reaching for several items on a table feel effortless. Yet behind the scenes, your brain must chain together many small movements into smooth, coordinated actions. This study asks a deceptively simple question: does the brain always plan such action chains as one long motion, or does it build them step by step, using a hidden hierarchy of smaller building blocks?
Reaching for Big Targets on a Table
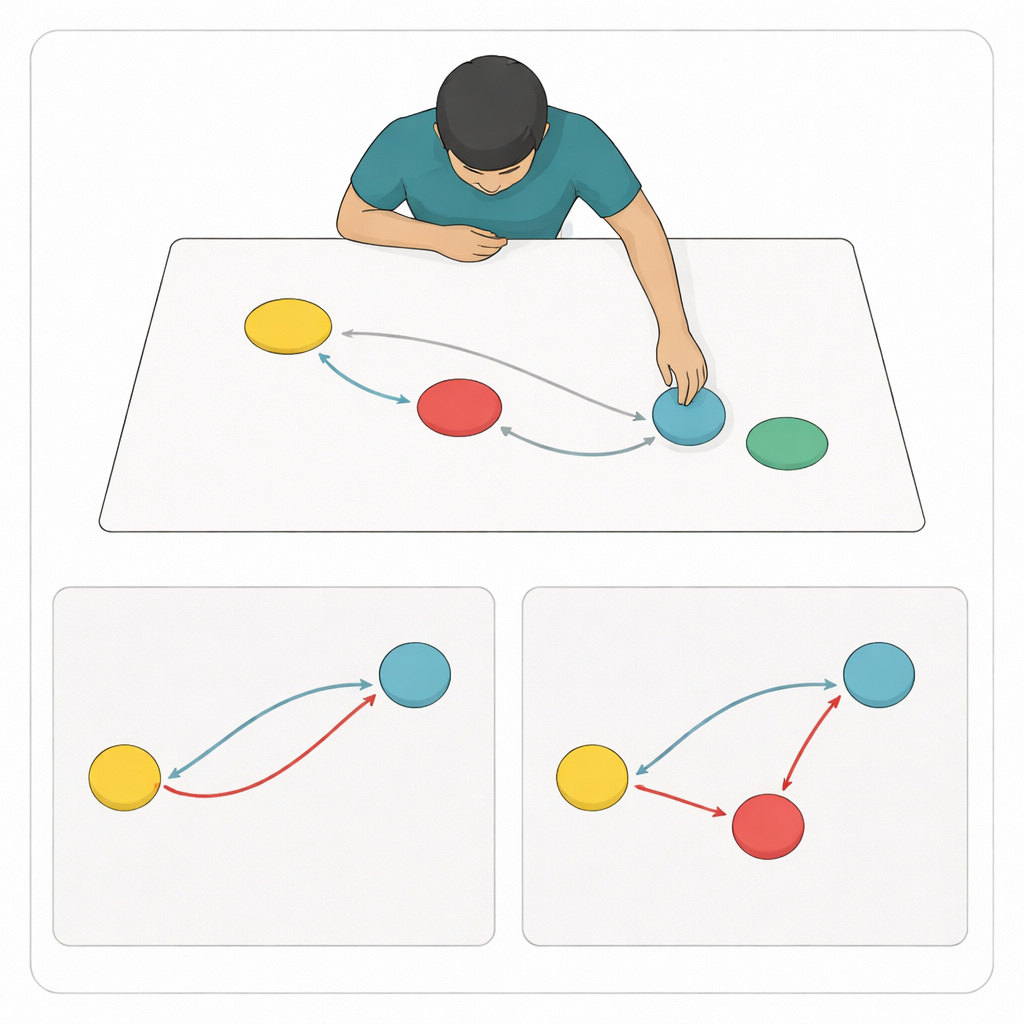
To explore this, the researchers designed a tabletop game of “connect the dots” for the hand. Twenty volunteers sat at a table with several large colored circles printed on the surface. A starting circle sat near the body, with other circles placed to the left, right, and above. On each trial, participants heard a sound and had to move their index fingertip from the start circle through a short sequence of targets and back again, as quickly as possible but without being extremely precise: it was enough for the fingertip to land anywhere inside each circle. This low-precision setup encouraged people to move fast and fluidly, letting their paths bend and blend between targets rather than stopping sharply at each one.
Reading Hidden Plans from the Curves of the Hand
Instead of timing how long people took or how often they erred, the team focused on the exact shape of each fingertip path. They looked at two key features. First, “midway bending”: how much the path to a target drifted toward the next target before actually reaching it. Second, “turning around a target”: how sharply or smoothly the path curved as it passed near a target and changed direction. Together, these patterns reveal whether a movement to one target is already taking the next target into account—an effect called “coarticulation,” similar to how your mouth shapes upcoming sounds while speaking. The scientists compared these measured curves to the paths produced by two computer models of movement planning, both grounded in established theories of optimal control but differing in inner structure.
Flat Plans Versus Layered Plans
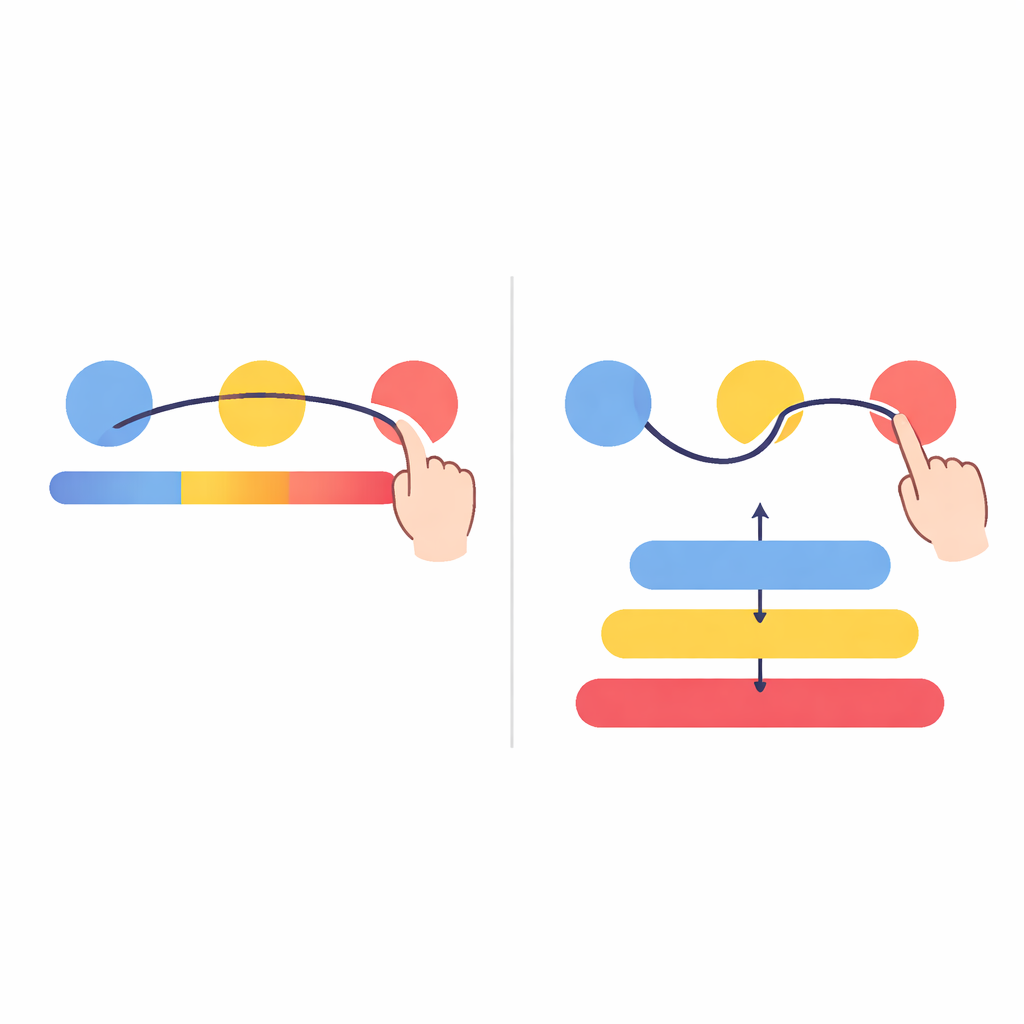
In the “flat” model, the brain is imagined to plan the entire three-target sequence as a single, unified trajectory before the hand begins to move. This resembles a fully memorized gesture or “chunk” executed in one go. In that case, midway bending and turning around targets are tightly linked: once the planner decides how strongly to aim for the first target, it largely fixes how the curves will look throughout the whole sequence. The “hierarchical” model, by contrast, adds a simple intermediate layer that stitches together smaller pieces—such as a two-target movement followed by a single-target return—on the fly. A separate dynamical system decides when to switch from one sub-movement to the next, allowing the shape around each target to be adjusted more independently while keeping overall movement smooth.
Behavior that Looks Hierarchical
When the researchers ran many simulations, they found that the flat model simply could not generate some combinations of midway bending and turning that human participants naturally produced. In particular, people often showed strong bending toward the second target in the first part of the movement, yet still made a sharp or differently shaped turn around that second target—patterns the flat planner could not match. The hierarchical model, however, could recreate these mixed behaviors by dynamically linking separate “sub-movements” at intermediate targets. By comparing the real data against both models, the authors concluded that nearly half of all recorded movement sequences clearly required a hierarchical explanation, while others were compatible with flat planning, suggesting that people flexibly switch strategies depending on the sequence.
What This Means for Everyday Skill
The findings suggest that even without long practice or highly trained routines, our brains often rely on layered plans when stringing together simple reaches. Rather than always compressing a sequence into a single, rigid chunk, the motor system appears to keep reusable movement pieces on hand and link them in real time. Over training, such chains may gradually collapse into flatter, fully “chunked” actions, helping to explain how skills become so fast and automatic. This work provides a new, geometry-based window into how the brain organizes movement, which could guide future research on motor learning, rehabilitation, and the design of robots that move with similarly adaptive grace.
Citation: Cuevas Rivera, D., Kiebel, S.J. Behavioral evidence for the hierarchical execution of sequential movements. Commun Psychol 4, 52 (2026). https://doi.org/10.1038/s44271-026-00436-5
Keywords: motor control, movement planning, chunking, hierarchical behavior, sequential reaching