Clear Sky Science · en
Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice
Climbing Where Gravity Is Barely There
Imagine trying to climb a frozen cliff where gravity is so weak that your own weight can’t help your boots dig in. That is the challenge facing future robots sent to icy moons like Saturn’s Enceladus, where scientists hope to search for signs of life in deep ice vents and caves. This paper describes a new way for robots to latch onto ice using fast, hammer-like blows and a firm pinch, taking inspiration from mountaineers’ ice axes. The result is a lightweight anchoring system that uses far less force and energy than today’s ice screws or heated picks, potentially making previously unreachable icy worlds more accessible.

Why Holding Onto Ice Is So Hard
On Earth, a climber can lean their full weight into an ice screw or axe to bite into the surface. On Enceladus, gravity is only about one percent of Earth’s, so a robot can’t rely on its weight to push tools into the ice. Existing options each have big drawbacks. Ice screws need large pushing forces to start biting into the surface—so much that, on Enceladus, a robot might need to weigh as much as a large Mars rover to use them effectively. Heated “thermal picks” can melt themselves into place with very little push, but they consume enormous amounts of energy each time they are used, a serious limitation for spacecraft operating far from the Sun. At the same time, many modern climbing robots depend on rough rock features, suction, or special adhesives, all of which struggle with the smooth yet wavy shapes found on natural glacier ice.
Borrowing a Trick from Human Ice Climbers
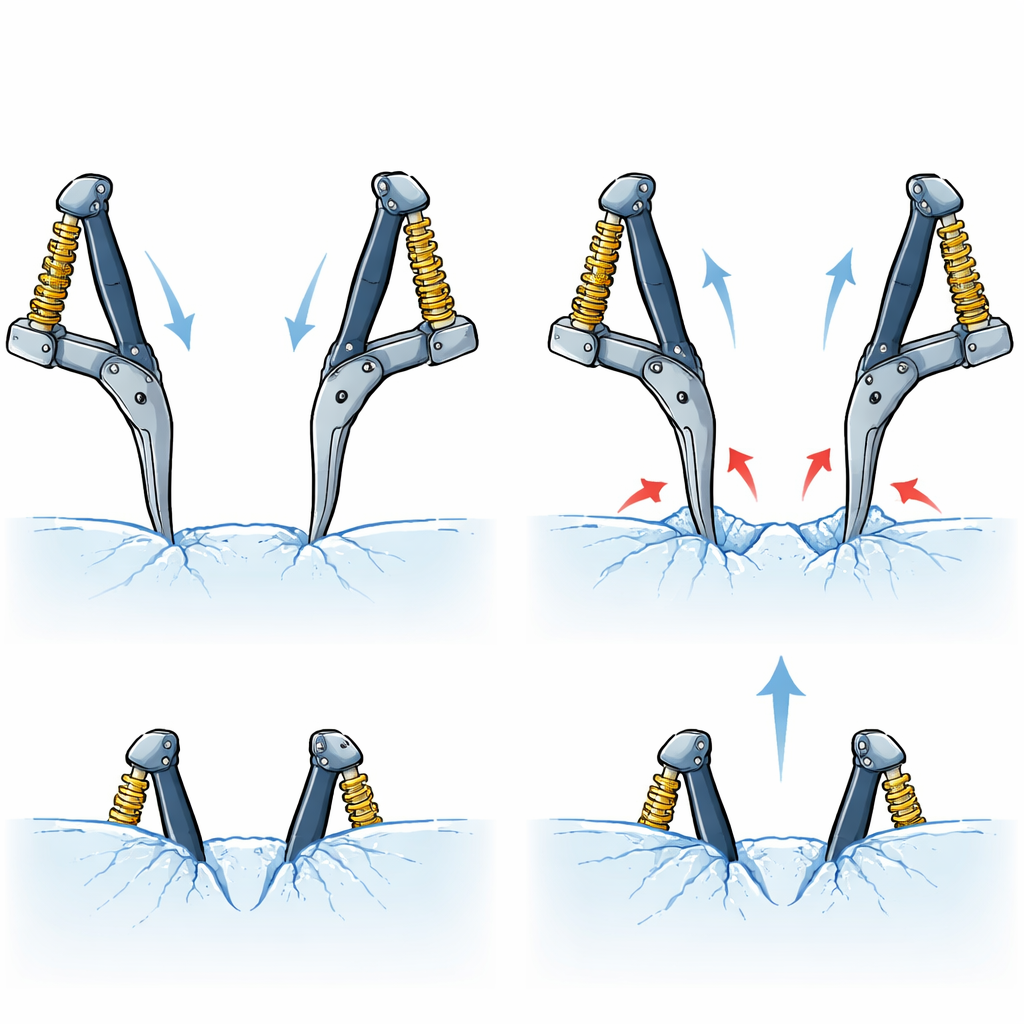
The authors propose a different strategy: instead of adapting to the ice surface, create your own grip points. Their device uses two small ice axes mounted on a compact gripper. First, springs inside the arms are wound up, storing a modest amount of mechanical energy. When released, the axes swing like tiny hammers and strike the ice, chipping out small pits. Next, the same mechanism squeezes the axes toward each other so that their tips hook into the new indentations. This two-step process—impact, then grasp—turns a smooth patch of ice into something the robot can hold onto, and it can be reversed easily so the robot can take another “step.” The entire cycle is powered by a single motor that both charges the springs and tightens the grasp.
Testing the Physics Behind the Grip
To make sure this approach would work reliably, the team built mathematical models of how deep the axe tips would bite and how much they might bounce back after impact. They then tested single axes swinging like pendulums into blocks of freshwater ice chilled to typical glacier temperatures. By comparing theory and experiment, they found that their models could predict how deep a pit would form and estimate the “recoil” energy when the axe springs back. Using these results, they calculated how hard a robot must press the gripper against the ice before swinging, so the axes stay in their new pits instead of bouncing out. For their chosen spring energy, the model predicted that about 16 newtons of push—roughly the weight of a couple of liters of water on Earth—would give nearly certain success.
From Lab Bench to Glacier Wall
With the models in hand, the researchers tested the full dual-axe gripper. In the lab, they confirmed that impacts with stored spring energy of 8 joules could create deep enough pits while needing far less initial push than ice screws and vastly less energy than thermal anchors. They then measured how strong the final grip was by pulling the device straight off the ice. By adjusting how tightly the axes squeezed toward each other, they discovered two ways the grip could fail: at low squeeze, the tips slid out of the pits; at very high squeeze, the ice ledges themselves broke away. Between these extremes lay a sweet spot where the gripper could support more than twice its own weight. Field tests on a French glacier showed the device could anchor on steep, natural ice, firm snow, and even tree trunks, rocks, and hard-packed soil, confirming that the impact-and-grasp method works outside the lab.
What This Means for Future Explorers
The study shows that breaking and pinching into ice can be a highly efficient way for robots to climb and hold steady in harsh, low-gravity environments. By exploiting the fact that cracking ice uses far less energy than melting it, the dual-axe gripper forms strong, reversible anchors using modest forces and only a few joules of energy per step. For missions to Enceladus or other icy worlds, such a system could let small, energy-limited robots safely descend into vents or hang onto cliff walls while sampling materials that may reveal whether life exists beyond Earth. The same idea could also help Earth-based robots explore glaciers, icy caves, and brittle rock faces that are too dangerous or inaccessible for human climbers.
Citation: Galassi, A., Trebi-Ollennu, A., Papadopoulos, P. et al. Fracture-based grasping: dynamic impact enables predictable robotic anchoring to freshwater ice. npj Robot 4, 22 (2026). https://doi.org/10.1038/s44182-026-00085-0
Keywords: robotic ice climbing, planetary exploration, robotic grippers, ice fracture anchoring, Enceladus missions