Clear Sky Science · en
Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers
Robots That Can Dance Through Traffic
Imagine dozens of flying and driving robots zipping around a warehouse, never bumping into each other, and finishing their jobs faster than human drivers could manage. This paper describes a new way to choreograph such robot "traffic" so that many machines can move aggressively and quickly in tight spaces while still staying safe. The work matters because the same ideas could one day power robot fleets in factories, warehouses, and delivery services that have to work nonstop in our everyday world.
Why Herding Many Robots Is So Hard
Coordinating a crowd of robots is much harder than steering a single one. Every robot must get from its starting point to its goal without crashing, blocking others, or getting stuck in endless loops. Today’s approaches tend to live at two extremes. Some methods treat robots like game pieces on a grid, which makes planning for hundreds of them fast and mathematically tidy—but the resulting paths often ignore how real machines move, accelerate, or turn. Other methods simulate full physical motion and produce beautiful, smooth paths, yet they become painfully slow or unreliable when the number of robots grows beyond a handful.
A Middle Road: “Concrete” Planning
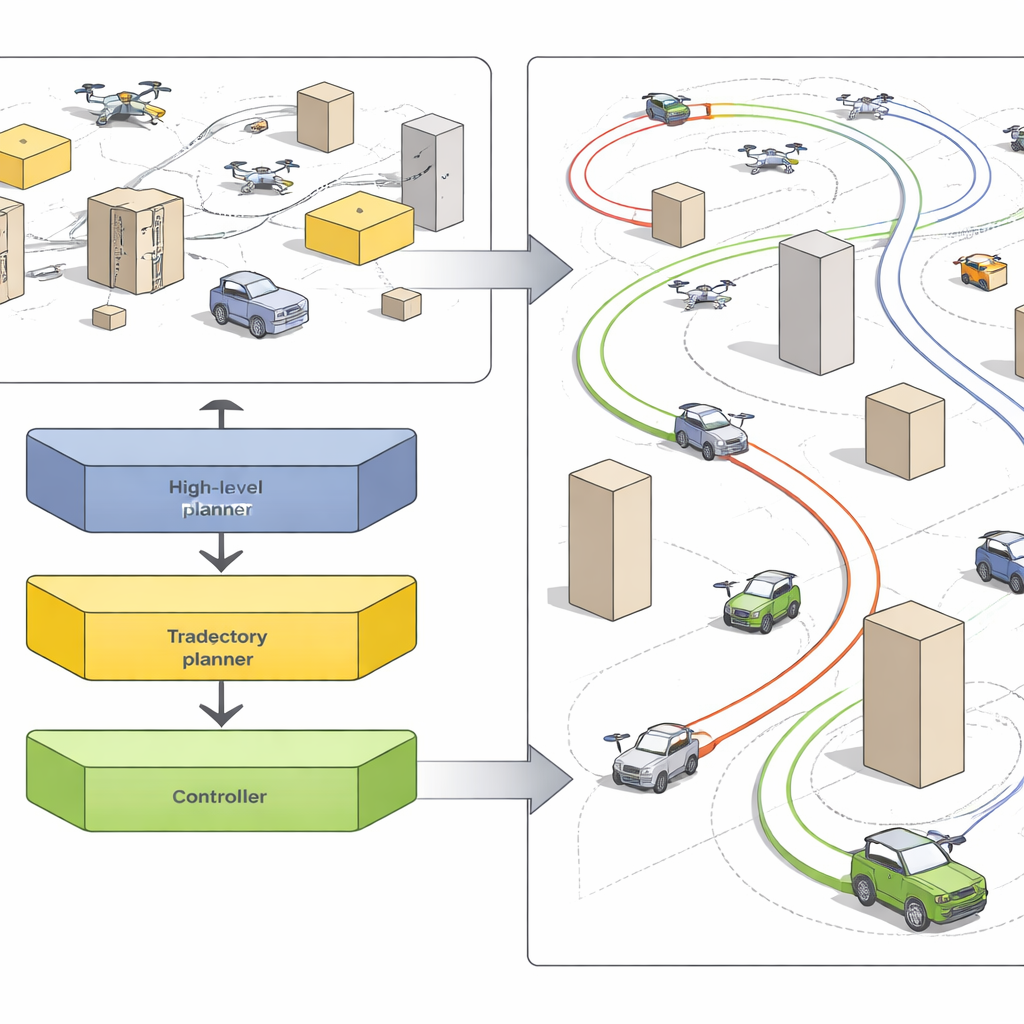
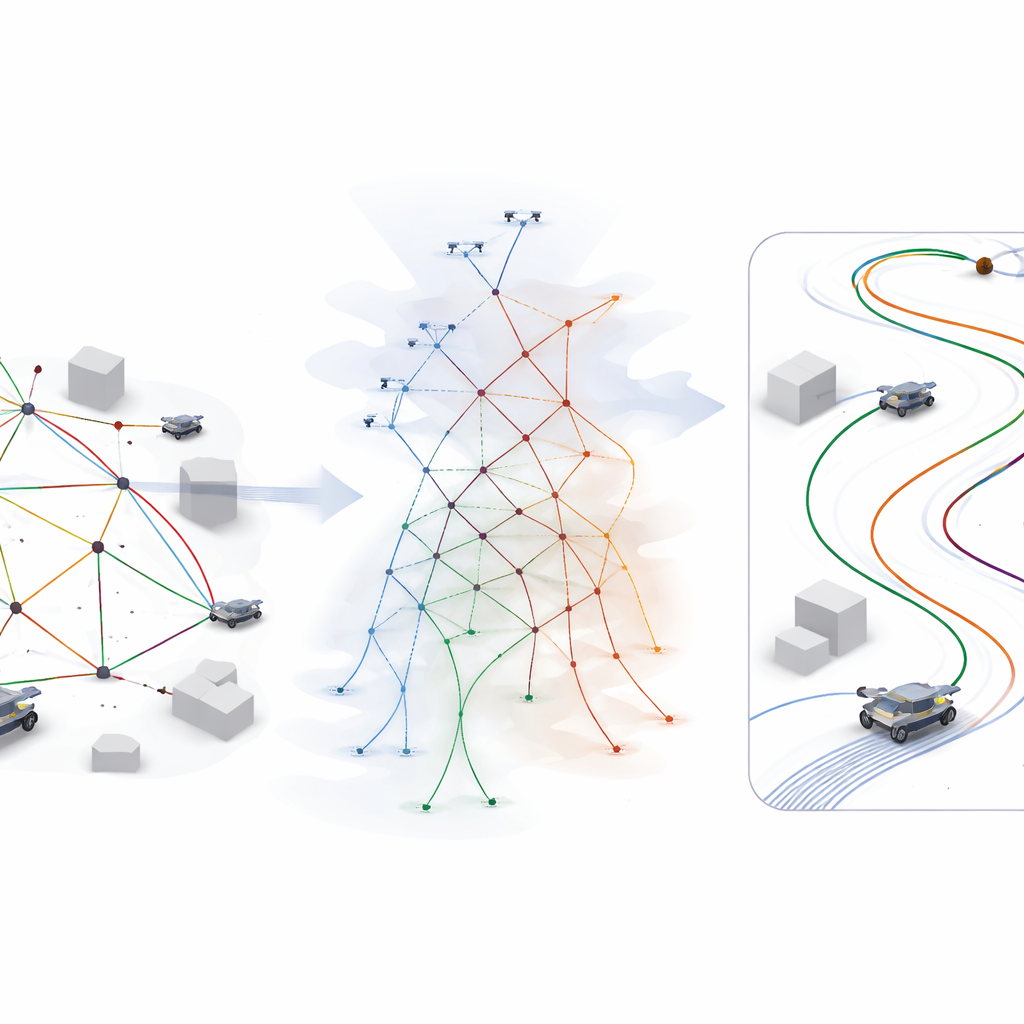
The authors propose a hybrid strategy they call “concrete” multi-agent path planning. The idea is to blend the crisp structure of grid-style planning with a realistic picture of how robots actually move. Instead of working purely in an abstract grid or in fully continuous physics, the system uses a layered description of motion. A central planner searches over a discrete set of possible moves for all robots at once, but each move is enriched with predictions about how long it will take, how the robot might wobble off its intended line, and how close it can safely pass others. These predictions come from data-driven models trained on real robot experiments, so the planner “knows” how its fleet tends to behave in practice.
From Rough Sketches to Precise Motion
Once the coupled planner has produced safe, conflict-free waypoint sequences for every robot, the framework zooms in. A second module turns each coarse path into a dense, smooth trajectory that respects limits on thrust, steering, and other physical factors. To do this quickly, the authors first used heavy numerical optimization offline to generate many examples of near time-optimal motion, then trained transformer-based neural networks to imitate those examples. At run time, these networks can generate high-quality reference paths in less than a millisecond. A third layer, a model predictive controller equipped with a safety filter, constantly adjusts the controls to follow these references and uses local sensing to dodge any surprises, such as a wandering obstacle or slight tracking error.
Putting Forty Robots to the Test
The team demonstrated their system with a mixed fleet of 20 quadrotor drones, 8 ground robots, and 12 robots acting as moving obstacles, all operating together in a room-sized indoor arena. In one set of experiments, swarms of drones raced through confined spaces at peak speeds above five meters per second while avoiding each other in a kind of three-dimensional ballet. In another, ground robots repeatedly crossed a cluttered area with randomly moving obstacles, completing more missions, with fewer stops and no collisions, than competing methods. The most demanding trials involved all 40 robots running multiple missions in sequence, with the system continuously replanning paths on demand without deadlocks or crashes.
Hints of Future Delivery and Warehouse Systems
To show how this could translate into real-world tasks, the authors staged mock “last‑mile” deliveries and warehouse operations. In the delivery scenario, ground robots carried drones to a “river bank,” where the drones took off, flew to scattered drop-off points, returned to their mobile bases, and then rode back to the starting area—all while avoiding moving obstacles. In the warehouse mockup, teams of drones repeatedly ferried virtual parcels between shelves and delivery zones, maintaining dense, agile motion and high throughput. These case studies required only minor tuning of the framework, underscoring its ability to adapt to new platforms and missions.
What This Means Going Forward
In plain terms, this work shows that it is possible to have large teams of robots move both boldly and safely in tight, changing spaces by carefully combining fast high-level planning, realistic motion models, and last-resort safety checks. The “concrete” approach turns abstract plans into movements that real machines can execute at speed, while still providing guarantees against collisions and deadlocks in many practical settings. Although extremely chaotic environments and completely unknown spaces remain challenging, the framework points toward a future where fleets of delivery drones, warehouse runners, and other robotic workers can share crowded environments without constant human supervision.
Citation: Okumura, K., Yang, G., Gao, Z. et al. Concrete multi-agent path planning enabling kinodynamically aggressive maneuvers. npj Robot 4, 20 (2026). https://doi.org/10.1038/s44182-026-00083-2
Keywords: multi-robot coordination, path planning, robot swarms, warehouse automation, drone delivery