Clear Sky Science · en
Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization
Why Losing a Sensor Doesn’t Mean Losing the Trail
Imagine a search-and-rescue robot trying to sniff out a gas leak or trapped survivor in a collapsed building—then one of its key sensors breaks. Today’s robots often fail badly under that kind of damage. This study takes inspiration from a surprising expert in smell-based navigation, the male silk moth, to show how animals can keep tracking an odor source even after losing half of their “nose,” and how that strategy can be copied in four-legged robots.
A Tiny Navigator with a Powerful Sense of Smell
Many animals—from insects to dogs—use airborne chemical signals to find food, mates, or safe shelter. Odors are especially useful when vision is blocked by darkness, smoke, or rubble. But real odor plumes are messy: wind shifts, buildings and trees bend the flow, and the strongest smell is not always directly upwind of the source. Most odor-hunting robots assume that all their odor sensors work perfectly and that the smell and wind directions neatly line up. In the wild, neither assumption holds. The silk moth Bombyx mori offers a natural counterexample: the males can locate females releasing sex pheromones even in turbulent air and, intriguingly, even when one of their two antennae—their main smell organs—is removed.
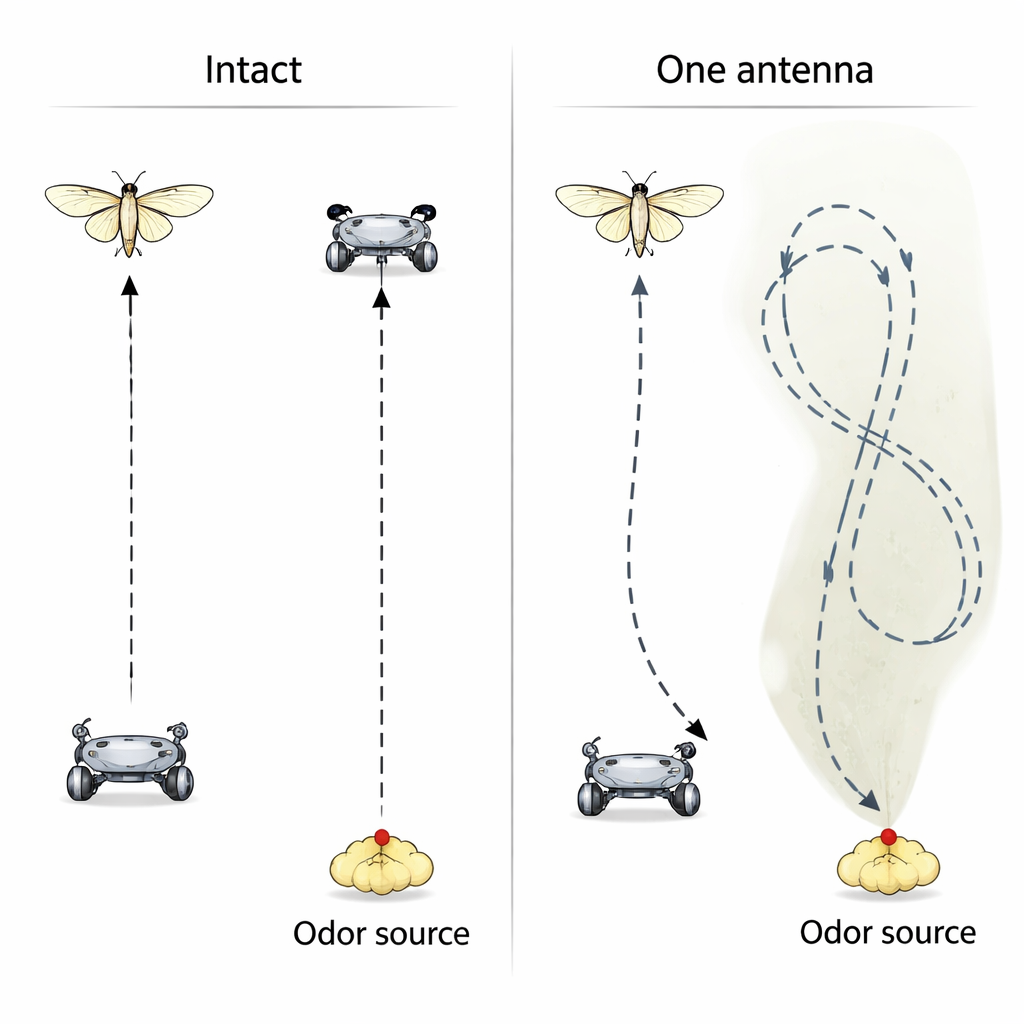
How Moths Cope After Losing an Antenna
The researchers first tested how well intact male silk moths, and moths with the left antenna removed, could walk to an odor source in a laboratory. Both groups started 15 centimeters away from a pheromone-emitting point. Surprisingly, the success rate—reaching the source within a minute—did not drop significantly after one antenna was removed. What did change was the path: intact moths tended to march along a fairly straight route, while one-antenna moths took longer, more winding paths that curved toward the side of the remaining antenna. Detailed measurements of head movements revealed that the moths switched their turning strategy depending on where along the remaining antenna the odor was detected—near the base or near the tip—and on which way they were currently turning.
Two Simple Rules Hidden in Complex Behavior
By repeatedly pulsing odor from the left and right and tracking the moths’ head angles, the team converted behavior into probability curves showing how likely a moth was to turn left or right after each puff. When an odor hit near the base of the antenna, the moth strongly favored continuing to rotate toward that same side, effectively committing to follow the current turn. When the odor hit near the tip, the choice became more balanced, with a slight bias to explore the opposite side. Put simply, antennal loss did not make the moth give up; it made the moth adopt a search pattern that samples both sides of space more broadly, especially along the “edge” of the odor plume where smell intensity changes rapidly.
Teaching a Four-Legged Robot to Smell Like a Moth
Next, the researchers built a quadruped robot with odor-sensing devices on its “head,” arranged to imitate the base-to-tip structure of an antenna. They created two search algorithms. The first, a standard moth-inspired approach called SZL (for surge–zigzag–loop), assumes two working odor sensors and chooses its straight “surge” direction from the relative timing of left and right detections. The second, called context-dependent moth-inspired (CDMI), embeds the new moth rules: it estimates where along the remaining sensor an odor was detected and uses the probability curves derived from the animal experiments to decide which way to move and how sharply to turn. In indoor tests, SZL worked best when both sensors were intact, giving fast, fairly straight paths. But when one sensor was disabled, CDMI clearly outperformed SZL, finding the source more often by following the changing edge of the odor field in looping trajectories similar to those of the one-antenna moths.
Robots That Stay Smart When Things Break
To push the idea further, the team tested their robots outdoors, where natural wind and turbulence make odor plumes highly patchy. They gave the intact robot the conventional SZL algorithm and the “one-sensor” robot the CDMI algorithm. Both achieved comparable success rates, but the damaged robot using the moth-inspired adaptive strategy often found the source with shorter, less meandering paths. This suggests that in rough, real-world conditions it can actually be better to switch from a precise but fragile sensing scheme to a more exploratory, edge-following strategy. The broader message is that robust navigation does not require ever more complex artificial intelligence. Instead, simple, biologically grounded rules—tied to how sensors are laid out on the body and how the body interacts with its environment—can help create robots that keep working even when key parts fail, a crucial property for long-duration exploration and rescue missions.
Citation: Shigaki, S., Yokota, K., Sekiwa, R. et al. Insect-inspired adaptive behavioral compensation strategy against olfactory sensory deficiency for robotic odor source localization. npj Robot 4, 12 (2026). https://doi.org/10.1038/s44182-026-00080-5
Keywords: olfactory navigation, bioinspired robotics, odor source localization, insect-inspired AI, embodied intelligence