Clear Sky Science · en
Tactile-reactive gripper with an active palm for dexterous manipulation
Robots That Can Feel What They Hold
Imagine a robot that can gently pick a ripe strawberry, twist open a child‑proof bottle, or screw in a light bulb overhead—all without crushing, dropping, or misaligning anything. This paper describes a new robotic gripper that brings machines closer to that kind of careful, human‑like hand skill by giving the robot not just smart fingers, but an active, highly sensitive palm.
A Palm That Does More Than Just Hold
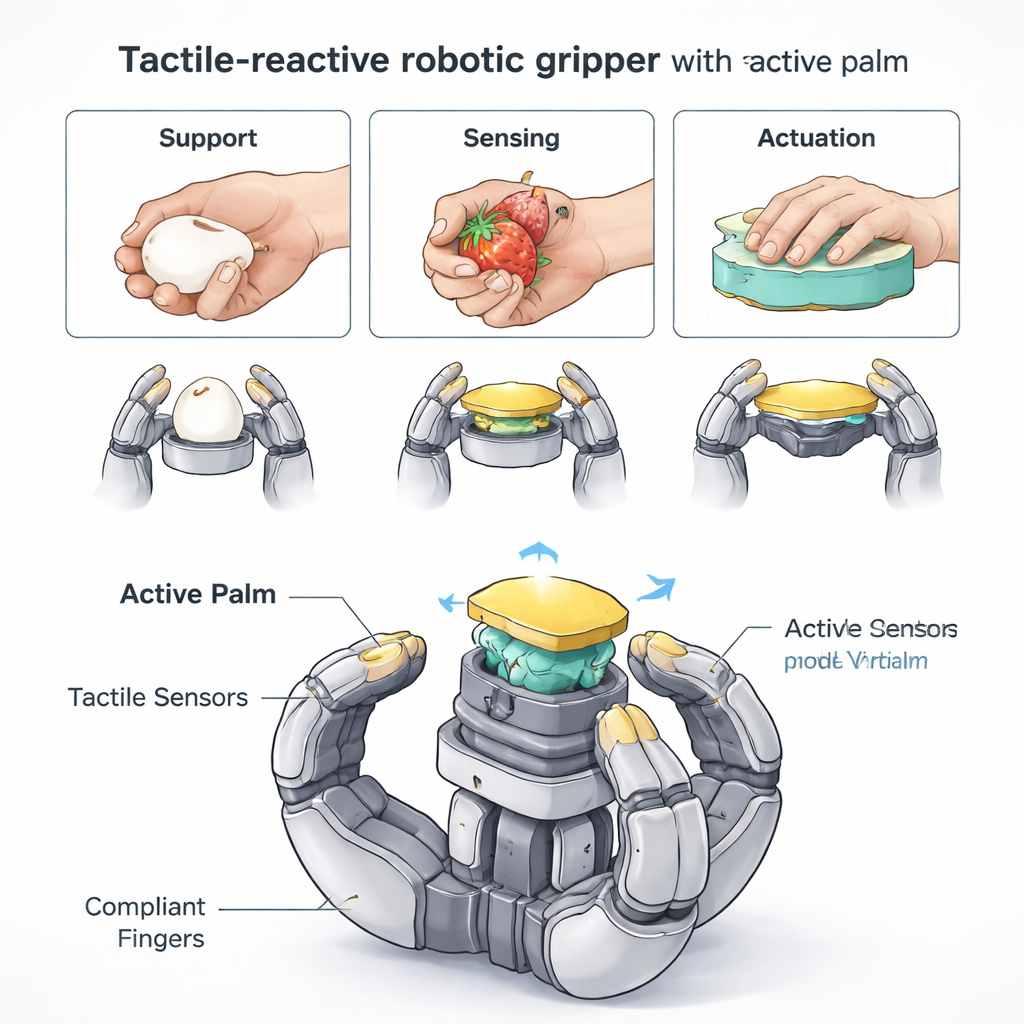
Most robot hands today either have simple, stiff claws that can only grab, or very complex multi‑fingered hands that are hard to build and control. A key insight of this work is that human hands rely heavily on the palm—not only the fingers—for support, feeling, and pushing. The researchers designed a three‑finger robotic gripper with a central palm that can move up and down and is covered by a camera‑based touch sensor. Each fingertip also has its own flexible pressure‑sensing pad. Together, these parts let the gripper feel where and how it touches an object and adjust its grasp in real time, even though the whole system uses only seven moving joints.
Simple Motions, Many Ways to Grasp
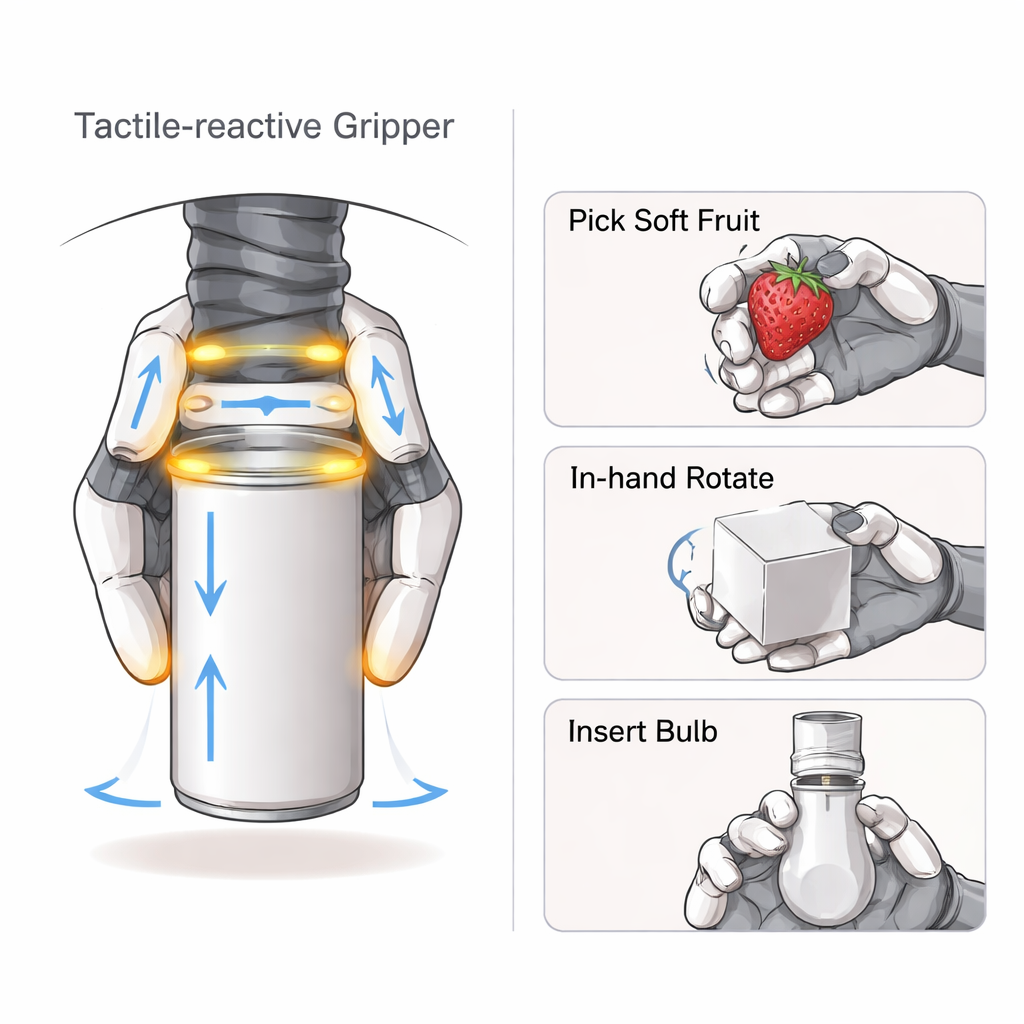
The gripper’s three identical fingers can sweep around and bend, allowing several everyday grasp styles: caging large items like balls, pinching thin objects such as cards, and clamping heavy tools in a power grip. The soft, spine‑like finger structure naturally wraps around objects of different shapes without detailed programming. Meanwhile, the palm slides vertically like an elevator, so it can press against an object, share the load with the fingers, or shift the object’s position in the hand. Simulations and experiments show that even with only two joints per finger plus the moving palm, the hand can move objects in many directions and avoid awkward, hard‑to‑control poses.
Feeling With Both Fingers and Palm
To understand what it is holding, the gripper combines three kinds of sensing: detailed touch images from the palm, pressure maps from the fingertips, and readings of its own joint angles. A machine‑learning system fuses these signals, paying more attention to whichever cues are most helpful for a given object. In tests with beverage cans and balls of different sizes and materials, the system could recognize what it was holding with almost 99% accuracy. This rich sense of touch also guides how strongly to squeeze, when to stop closing the fingers, and how to move the palm to keep contact stable without creating too much friction.
From Test Objects to Fruit and Light Bulbs
The team put the gripper through a widely used robot grasping benchmark with everyday objects like balls, tools, and small hardware parts. It scored higher than several well‑known research grippers while using fewer moving parts. Beyond test sets, the gripper showed it could pick fragile fruits—strawberries, grapes, tomatoes, and more—without visible bruising even days later, confirmed under ultraviolet light. It could also translate and rotate blocks and cylinders precisely in its hand, screw a light bulb into a socket facing upward, push a syringe plunger while holding the barrel, and open child‑resistant caps by pressing and twisting. In many of these tasks, the moving palm provided the extra push, support, or sensing that standard finger‑only grippers lack.
Why This Matters for Future Robots
The work demonstrates that robots do not always need more and more fingers or joints to be skillful. By carefully coordinating a few compliant fingers with an actively controlled, touch‑sensitive palm, this gripper achieves a mix of strength, delicacy, and awareness that begins to resemble a human hand. Because the parts are mostly 3D‑printed and use commercially available sensors, the design is relatively easy to reproduce. With further learning‑based control, similar grippers could help robots handle groceries, assist in home care, or work safely with people in factories—confidently feeling what they do, instead of just guessing.
Citation: Zhou, Y., Lee, W.S., Gu, Y. et al. Tactile-reactive gripper with an active palm for dexterous manipulation. npj Robot 4, 13 (2026). https://doi.org/10.1038/s44182-026-00079-y
Keywords: robotic gripper, tactile sensing, dexterous manipulation, robotic hand, active palm