Clear Sky Science · en
Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection
Smart Wings Under Water
Anyone who has watched a bird hover in a gusty wind or a fish hold steady in a fast stream has seen nature solve a hard engineering problem: how to stay on course when the surrounding fluid refuses to behave. This study shows how a new kind of soft underwater wing, equipped with a “sense of self” similar to animal proprioception, can automatically feel sudden flow changes and reshape itself to stay stable. The work points toward future underwater robots that glide more like animals and less like stiff machines, saving energy while handling rough seas.
Learning From Birds and Fish
In nature, wings and fins are not rigid blades; they bend, twist, and flex. Birds sense air motion through tiny receptors in their feathers, while fish use pressure-sensitive cells along their bodies and in their fin rays. These built-in sensors let animals feel how their appendages deform in moving water or air and respond almost instantly, rejecting gusts and turbulence. In contrast, most underwater vehicles use rigid control surfaces and separate instruments to measure flow, making them sluggish and power-hungry when the environment turns chaotic. The authors argue that combining flexibility and sensing in a single soft structure could narrow this gap.
A Soft Wing With Built-In Senses
The team built a half-wing for underwater use that marries a soft, bendable tail to a rigid nose. Inside the soft section run inflatable tubes filled with liquid, which can be pressurized to change the wing’s curvature, or camber. On the outside, they bonded a thin electronic “skin” made of silicone and liquid-metal wires. As the wing bends, the spacing between these buried conductors changes, altering their electrical capacitance. By training a simple machine-learning model to match these signals to camera-tracked shapes, the researchers turned the e-skin into a highly accurate shape sensor. Once trained, the system can estimate the wing’s camber in real time without external cameras, even while submerged.
Turning Shape Into Control
With this proprioceptive soft wing mounted in a water tunnel, the researchers mimicked gusts as sudden changes in the wing’s angle to the flow. First they showed, in steady conditions, that by adjusting camber they could produce the same lift at different flow angles, or different lifts at the same angle. This means that when a gust tries to knock the wing off balance, there is a “path” in shape space that can restore the desired lift. They then programmed an idealized open-loop response—knowing exactly when the gust would occur—to inflate or deflate the internal tubes at the right moments. In this best-case scenario, changing the camber cut the drop in lift during a disturbance from about 50% down to roughly 10%.
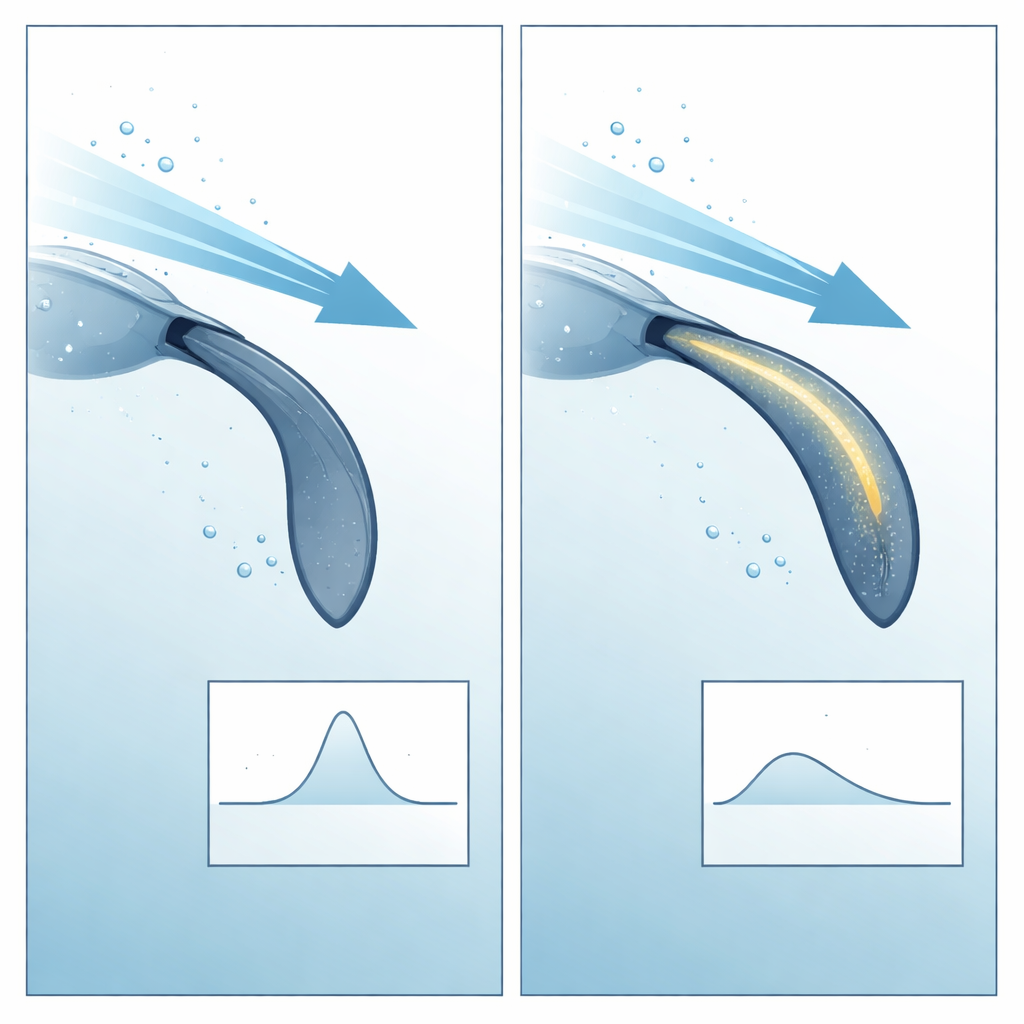
Letting the Wing React on Its Own
The more demanding test was to let the wing decide for itself when something was wrong. Here the e-skin senses a characteristic “signature” in the camber signal: a quick overshoot and oscillation as the soft body flexes under a sudden change in flow. When this pattern appears, a simple controller inflates the tubes in the direction most likely to bring the lift back toward its target, without explicitly calculating the flow or forces. Even this minimalist strategy works well. Compared to an equivalent rigid wing, the unactuated soft wing alone cuts the impulse of a gust—essentially, the overall shove delivered over time—by about a factor of three. When active control is added, the total unwanted lift impulse is reduced by up to 87%, approaching and even surpassing the gust-handling capability reported for some birds, though in a different medium.
Why This Matters for Future Robots
For a lay reader, the key takeaway is that making underwater robots softer and more self-aware can make them both tougher and more efficient. Instead of fighting disturbances with brute-force motors and complex external sensors, the robot’s own flexible body and embedded skin help absorb and read the flow, triggering modest shape changes that keep it on course. While this study focuses on a single experimental wing in a controlled tank, the same principles could apply to full vehicles or to fish-like swimming robots. In the long run, such “embodied intelligence” may allow machines to explore turbulent oceans with the same quiet grace that birds and fish already display in air and water.
Citation: Micklem, L., Dong, H., Giorgio-Serchi, F. et al. Harnessing proprioception in aquatic soft wings enables hybrid passive-active disturbance rejection. npj Robot 4, 16 (2026). https://doi.org/10.1038/s44182-026-00078-z
Keywords: soft robotics, underwater vehicles, bioinspired design, flow disturbance rejection, proprioceptive sensing