Clear Sky Science · en
Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators
Soft Robots That Move More Like Muscles
Imagine a robot that can safely hug a child, squeeze through rubble in a collapsed building, or gently massage a failing heart. To do those jobs, machines must bend and stretch the way living tissue does, not clank like metal. This review paper explains how a new class of “soft” electrical muscles—made from rubbery solids and liquids—are bringing that vision closer to reality, and what challenges remain before they leave the lab and enter everyday life.
From Rigid Motors to Soft Electric Muscles
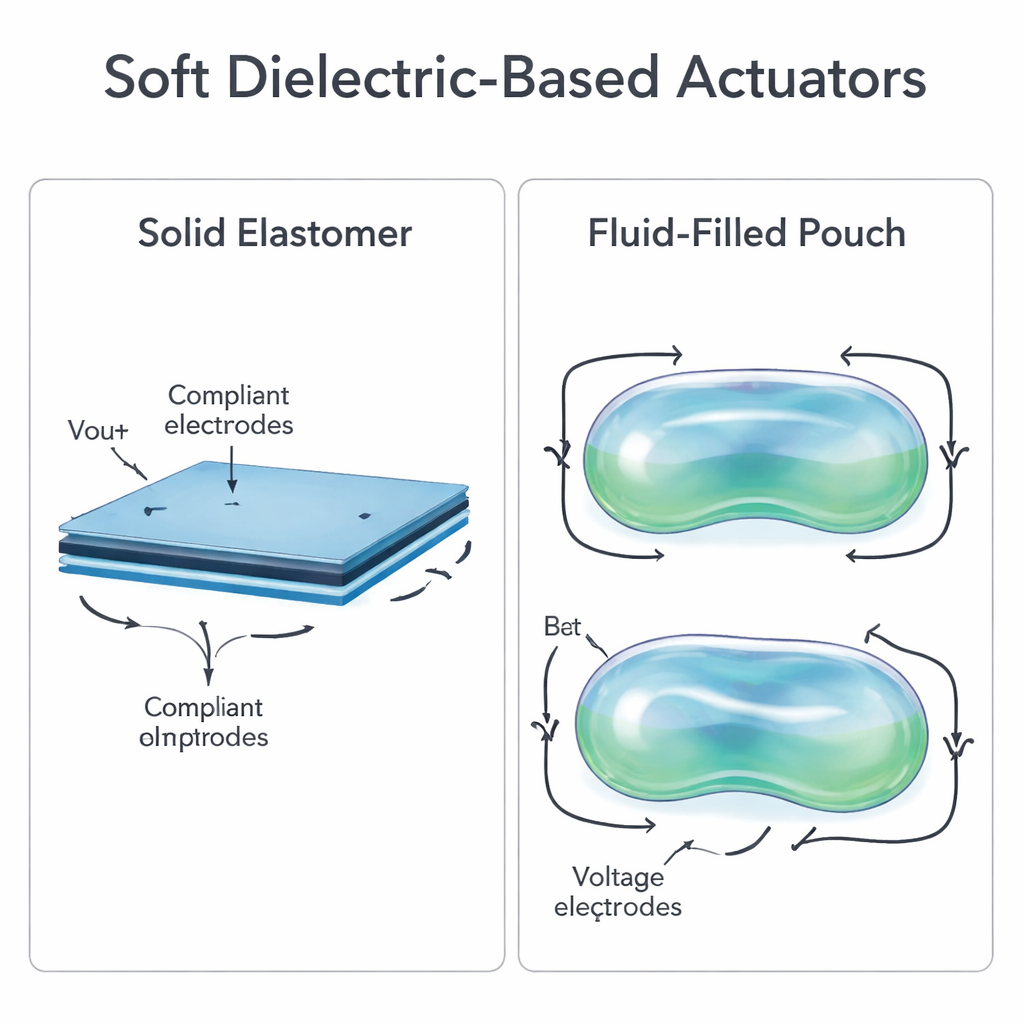
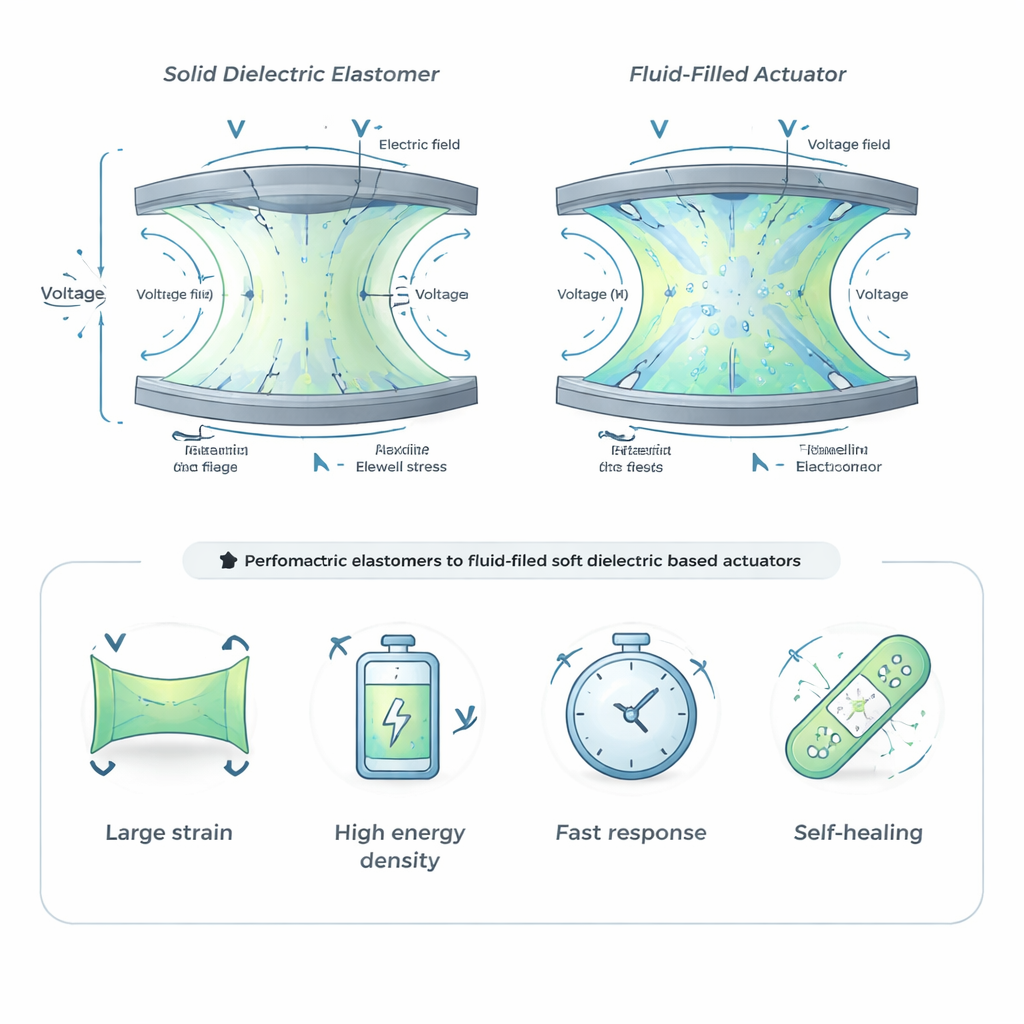
Most industrial robots depend on heavy, rigid motors and gears. They are powerful and precise, but also expensive, fragile, and potentially dangerous around people. Soft robots, built from stretchy materials similar to silicone bakeware or rubber bands, trade brute strength for gentleness, adaptability, and resilience. The focus of this paper is on soft actuators driven by electricity: dielectric elastomer actuators (DEAs), which use a solid rubber layer, and dielectric fluid actuators (DFAs), which use an electrically insulating liquid sealed in a flexible pouch. In both cases, applying a voltage between two compliant electrodes squeezes the material through electrostatic forces and converts electrical energy directly into motion with large strain, high energy density, and fast response.
How the Materials Make Muscles Work
To behave like useful muscles, these devices need very particular materials. For DEAs, the central rubber sheet must be extremely soft so it can stretch easily, yet also withstand high electric fields without tearing or shorting. Researchers tune this balance using two main strategies. One is to design new polymers—from acrylics, silicones, and polyurethanes to more exotic block copolymers—that pack many polar chemical groups (which boost electrical response) into flexible, low‑stiffness networks. The other is to create composites by mixing in tiny particles or liquids that raise the material’s ability to store electrical energy. Similar thinking guides DFA design: engineers choose oils and other dielectric liquids with the right viscosity, stability, and compatibility with thin plastic or silicone shells, so voltage can rapidly shove fluid around to create bulges, strokes, and vibrations without leaks or chemical breakdown.
Building and Driving Soft Actuators at Scale
Turning these clever materials into reliable devices is its own engineering challenge. Traditional fabrication often involves laborious hand steps: stretching thin films on frames, painting or printing soft electrodes, stacking layers, and—in the case of DFAs—injecting liquid and sealing the pouch. The paper surveys newer manufacturing routes such as inkjet and screen printing, extrusion of fiber‑like muscles, and multi‑material 3D printing that can lay down electrodes and dielectrics in one go. It also explains how different shapes lead to different motions: flat patches that expand in area, domes that pop up, rolled cylinders that contract along their length, and structures that bend or vibrate. Because these materials can age, leak, or fail by electrical breakdown, the authors summarize lifetime studies and common failure modes, and highlight the push for self‑healing designs that can recover after a spark or puncture.
Smarter Control and Emerging Uses
Like natural muscles, soft actuators must be controlled. Simple open‑loop schemes just feed in a voltage pattern, but this can drift as the material warms or creeps. More advanced approaches embed sensors—or use the actuator’s own electrical signals—to measure strain, force, or vibration in real time and adjust the drive signal accordingly. Researchers are now experimenting with machine‑learning and reinforcement‑learning controllers that can cope with the non‑linear, history‑dependent behavior of soft materials. On the application side, the paper tours a wide landscape: artificial muscles that lift many times their own weight, fish‑like and insect‑like robots that swim or fly, wearable haptic bands and fingertip pads that provide realistic touch feedback, zoom lenses and light‑shaping skins inspired by squid and human eyes, shape‑morphing surfaces, and concept medical devices that might one day help failing hearts or paralyzed faces.
What Still Stands Between Lab Demos and Real‑World Robots
For all their promise, these electric muscles still face hurdles before they can safely power household helpers, medical implants, or mass‑market wearables. Many require kilovolt‑level driving voltages, which complicates safety and electronics. Materials that perform beautifully in short tests may stiffen, dry out, or fail after millions of cycles. Fabrication is often too slow and inconsistent for large‑scale production. And it remains hard to recycle or biodegrade most current polymers. The authors argue that progress will depend on co‑design across scales: new soft materials that combine low stiffness, high electrical response, robustness, and even self‑healing; automated, data‑driven manufacturing and testing; and control systems that exploit built‑in sensing and lightweight AI. Together, these advances could give future robots muscles that are not just strong and fast, but also safe, adaptive, and sustainable.
Citation: Molla, M.H.O.R., Chen, J. & Xu, C. Advancing soft robotics: recent progress in dielectric elastomer and fluid actuators. npj Robot 4, 17 (2026). https://doi.org/10.1038/s44182-026-00074-3
Keywords: soft robotics, dielectric elastomer actuators, dielectric fluid actuators, artificial muscles, haptic interfaces