Clear Sky Science · en
Nested interaction network enhances responsiveness in collective behavior
How Animal Crowds Stay So Sharply in Sync
Large groups of animals often seem to turn, dodge, or flee as if they were a single creature. This paper explores how the hidden "who-follows-whom" structure inside a group of fish — and inside robot swarms inspired by them — allows the whole crowd to react quickly and reliably when conditions change.
Layers of Guidance Inside a Moving Crowd
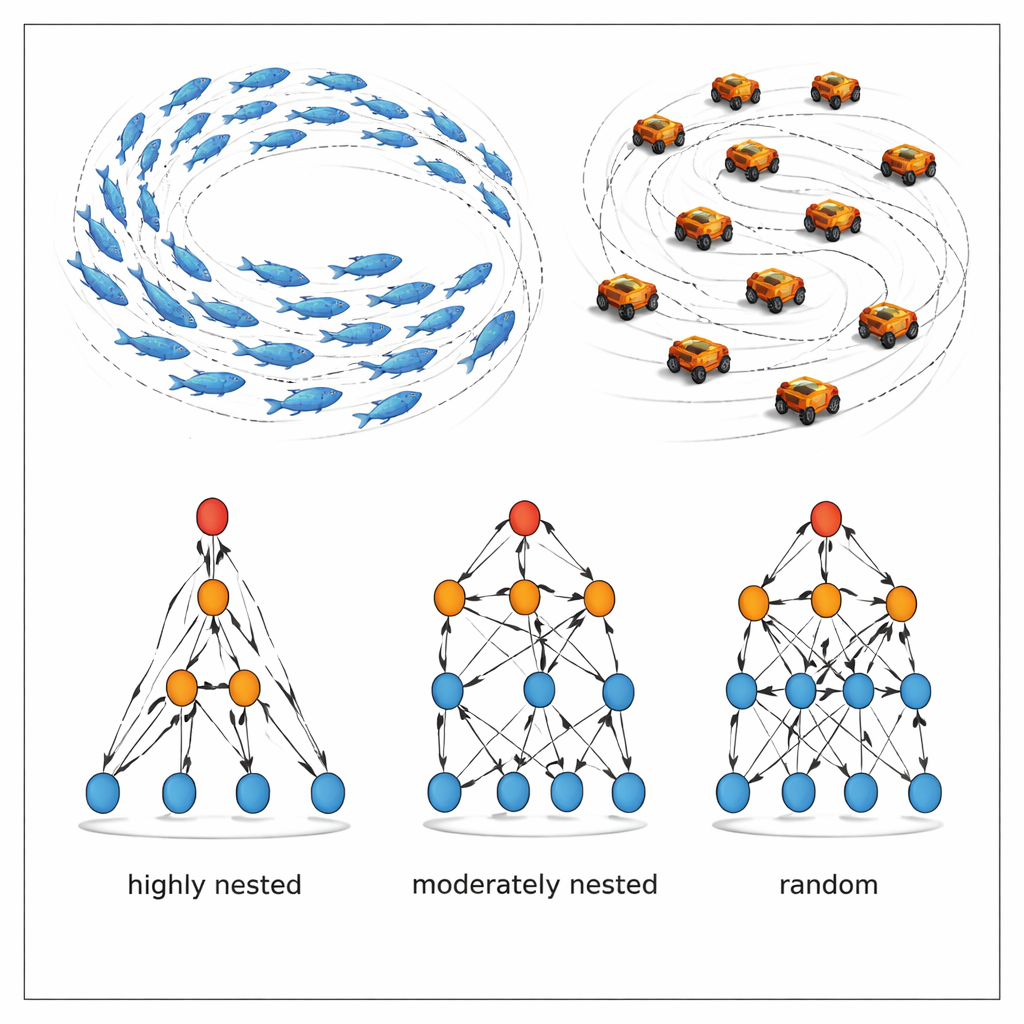
When we watch a school of fish swirl away from danger, it is tempting to think that every fish simply copies its neighbors at once. The authors show that reality is subtler: there is an invisible pattern of guidance in which some fish influence many others, and some mainly follow. This pattern is not a rigid pecking order, but a flexible web of leader–follower links that changes with the kind of motion the group is performing. The key structural feature the researchers focus on is called "nestedness": higher-level leaders do not just guide their closest followers, they also indirectly guide many lower-level fish further down the chain.
What Fish Schools Reveal About Fast Maneuvers
The team filmed small schools of rummy‑nose tetras swimming in a shallow circular tank, tracking each fish’s position and direction over time. From these trajectories they reconstructed who tended to move first and who tended to react later, building a directed network of influence for each group. They also measured how sharply the school turned (curvature) and how tightly aligned the fish were (polarization). They found that when the group executed quick, twisty maneuvers with frequent changes of direction, the underlying network was strongly nested: a few fish influenced many, and the pattern of influence resembled a neat triangular cascade. In contrast, when the school glided steadily in one direction, the network was less nested and more egalitarian, even though the fish remained well aligned.
Testing Information Flow in Idealized Networks
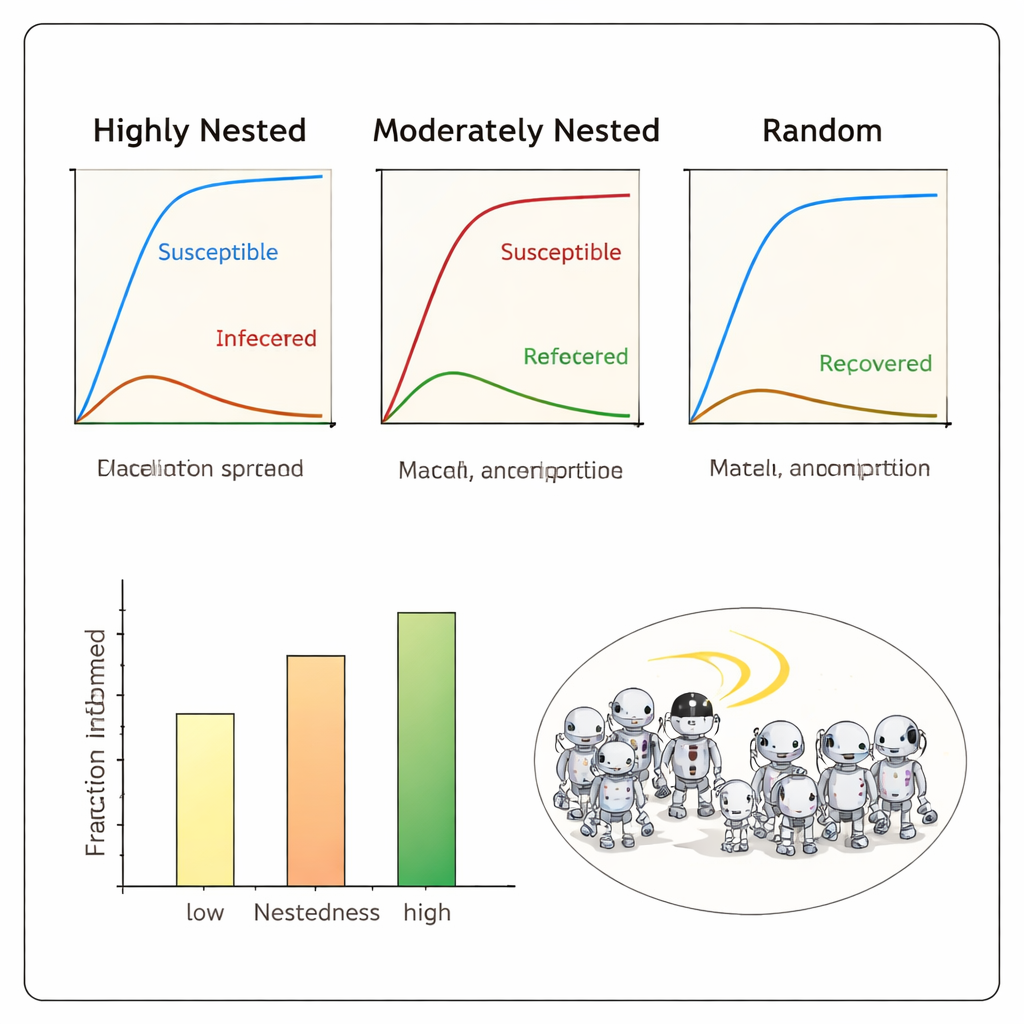
To understand why nested structures might help, the authors turned to a simple spreading model often used for epidemics. Here, a node becoming "infected" means it has picked up and is transmitting a directional cue, not a disease. They compared perfectly nested leader–follower networks to partially nested and random networks, keeping the overall number of connections the same. In the most nested case, a signal seeded at the top quickly reached almost every node, and it did so even when nodes recovered (stopped transmitting) relatively fast. As the network was randomized and nestedness decreased, the signal stalled: many nodes remained uninformed, the peak number of active transmitters dropped, and the model needed many more initial signal sources to achieve the same coverage.
From Equations to Turning Robot Crowds
The study then asked whether these structural advantages translate into actual movement. The authors built a "self‑propelled" swarm model in which each individual chooses whom to follow based on how striking a neighbor’s motion appears, but with a twist: the rule preferentially builds a nested hierarchy, where more "salient" movers become leaders for many others. They compared this perfectly nested scheme to two common alternatives: one where every neighbor has equal say, and another where influences are weighted smoothly by motion cues. In simulated groups asked to perform repeated, large turns commanded by a few informed individuals, the nested scheme allowed the crowd to match the target heading pattern more closely and with smaller delays, even when substantial noise was added to the motion.
Real Robots Acting Like Schooling Fish
Finally, the researchers implemented their nested‑network control on fifty small wheeled robots moving in a flat arena. In a "hovering" task, a single informed robot tried to keep the group circling a region. With a conventional weighted‑neighbor rule, the swarm’s path was smooth and sluggish, showing only gentle bends. With the nested rule, the robots executed sharper, more decisive turns, closely tracking the informed robot’s changes. In a "following" task, where an informed robot made unpredictable directional shifts, the nested‑controlled swarm again stayed closer in both position and heading, while the comparison swarm smoothed out or missed many of the turns.
Why This Matters Beyond Fish and Robots
In everyday terms, the work shows that how a crowd is wired matters as much as how sensitive its members are. A strongly nested web of influence — a layered chain where leaders at higher levels reach many others — lets groups react faster and more reliably to important signals, without being overwhelmed by noise. These insights could help biologists interpret animal swarms, guide the design of drone or underwater-robot teams that must respond quickly in risky environments, and even inform how we organize human networks when rapid, coordinated action is essential.
Citation: Zheng, Z., Tao, Y., Xiang, Y. et al. Nested interaction network enhances responsiveness in collective behavior. Commun Phys 9, 75 (2026). https://doi.org/10.1038/s42005-026-02510-0
Keywords: collective behavior, fish schooling, swarm robotics, information transfer, network hierarchy